


Hey !
Ça fait maintenant 2 ans que je n'ai pas fabriqué de robots en dehors des projets pour la fac et des Hacking Health mais la semaine dernière en utilisant ce petit delta lors d'un TP je me suis lancé dans une aventure express pour fabriquer le mien.
Je ne me souviens plus de la marque mais il est prévu pour l'industrie horlogère, il y a une pompe pour attraper les pièces et une caméra pour détecter leur emplacement.
Mes objectifs sont :
- Utiliser le matériel que je possède déjà
- Être le moins encombrant possible
- Tester avec une cinématique inverse existante
- Puis tenter de faire la mienne
- Pas de vision pour le moment
Ce robot est la moitié d'un projet qui consiste à apprendre à utiliser les méthodes de cinématique directe et inverse. La seconde moitié sera surement un mini bras à base de SG90.
J'ai donc décidé d'utiliser le matériel suivant :
- 3 moteurs pas à pas 28BYJ-48 avec leurs drivers ULN2003
- 3 Endstops
- 1 Arduino Nano
- 1 Electroaimant
- 1 transistor NPN 2N2222
- 12 billes aimantées
- 1m de tourillon bois 6mm
- 1m de tourillon bois10mm
- PLA blanc
- Beaucoup de vis et écrous M2, M2.5, M4
En faisant des recherches sur des deltas à base de 28BYJ-48, je suis tombé sur ce projet : https://tinkersproje...er-delta-robot/
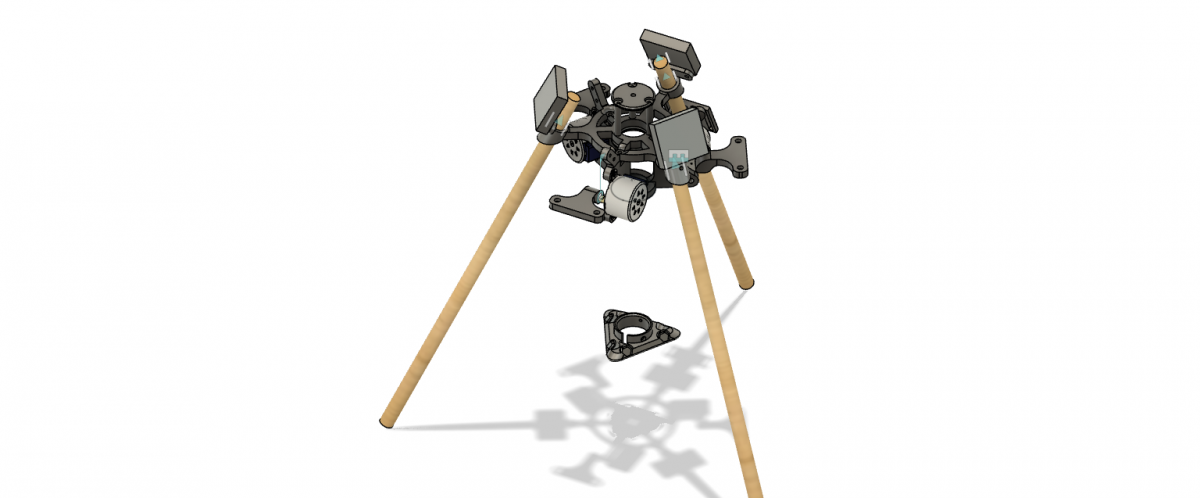
Il m'a conforté dans l'idée d'utiliser ces moteurs et la bibliothèque ( https://github.com/t...ematics-Library ) qu'il a créé pour sa cinématique est super simple à utiliser. Mais j'ai repris le design de zéro pour avoir tout les composants électroniques sur la partie haute et éviter d'imprimer entièrement les bras. Et voici le résultat :

C'est aussi le premier projet où je tente d'assembler les pièces sur Fusion 360 :
Actuellement, j'ai fini la séquence d'initialisation et je commence à jouer avec la bibliothèque de cinématique inverse.
Il est plutôt lent pour un delta mais la vitesse n'est clairement pas l'objectif de ce projet  Le programme de cet essai est disponible ici, ainsi que l'implémentation de la bibliothèque ici.
Le programme de cet essai est disponible ici, ainsi que l'implémentation de la bibliothèque ici.
Problèmes rencontrés :
- Le bras reliant le robot aux pieds en bois était trop flexible (le nouveau est à gauche)

- Remplacer les vis M4 par les écrous sur l'effecteur permet de caler la bille magnétique

- Les pins des moteurs doivent être déclarés dans cet ordre pour pouvoir tourner dans les 2 sens : IN1-IN3-IN2-IN4
- C'est vraiment pas facile de le mettre à niveau en vissant les tiges de bois, peut-être que je fermerais l'ouverture supérieure pour empêcher la tige de sortir une fois que je saurais quelle hauteur il me faut
Ressources :
L'idée des liaisons mécaniques à base d'aimants vient de ce projet d'imprimante : https://www.thingive...ng:210028/files
Vous pourrez trouver la bibliothèque de cinématique inverse pour Delta ici : https://github.com/t...ematics-Library










