Bonsoir,
En effet, dès que les moteurs consomment, la tension de la batterie chute (donc varie), et ce d'autant plus que le courant consommé est important, et que la résistance interne de tes batteries est importante (plus importante pour du plomb que pour du lithium, et généralement d'autant plus importante que les batteries sont bas de gamme).
Résoudre parfaitement le problème de bruit sur la partie signal est difficile, d'autant plus si le courant consommé coté signal varie aussi.
Après, les mouvements aléatoires des robots me surprennent un peu, vu qu'ils sont sensés être asservis en position.
Je vois plusieurs causes possibles, et je penses qu'il serait utile de déterminer laquelle est la coupable :
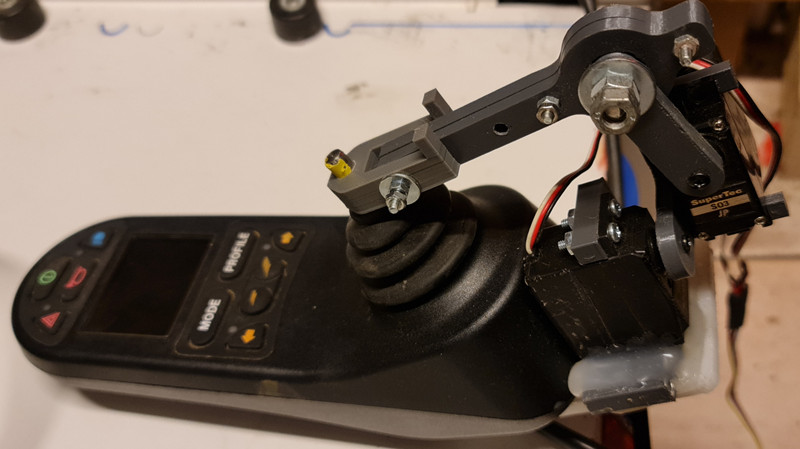
- la tension d'alim des servos varie
- la tension moyenne de commande des servos varie (si ce modèle de servo utilise la tension moyenne du signal au lieu de la durée : normalement ça ne devrait pas, mais avec des servos premier prix, c'est envisageable)
- les vibrations mécaniques font bouger les servos, et ceux-ci réagissent trop fort, entrainant des oscillations (mais je ne vois pas pourquoi le problème serait apparu maintenant)
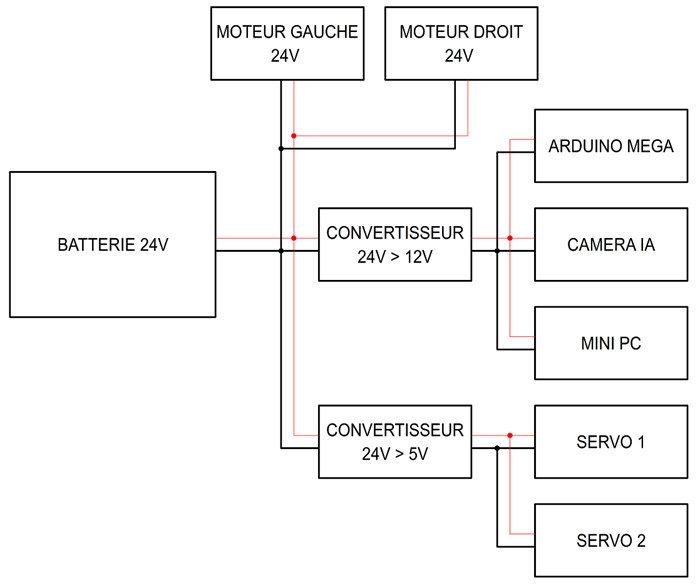
- les masses ne sont pas (ou pas bien) reliées
À ta place, je vérifierait en priorité le dernier point : si c'est ça, alors c'est facilement résolu. NB : je te conseille de relier les masses de sortie des 2 convertisseurs au plus court (n'hésites pas à rajouter un fil qui relie les 2 masses).
Si ton convertisseur 24->5V accepte du 12V en entrée, alors tu peux tester de générer le 5V depuis le 12V pour en augmenter la stabilité.
Est-ce que tu possèdes un oscilloscope? Si oui, alors il serait utile de regarder les tensions du 24V, du 12V et du 5V, pour vérifier le bruit/les chutes de tensions.
Ce serait également utile que tu donnes les liens de la documentation de tes convertisseurs (si la datasheet est bien faite, elle donne pas mal d'infos sur la qualité de la sortie si l'entrée varie.
Pour le filtrage, la version la plus simple (et qui ne peut pas faire de mal) est d'ajouter des condensateurs. Le mieux est probablement en sortie des convertisseurs, mais il faut vérifier combien max tu as le droit de mettre (certains convertisseurs deviennent instables avec trop de capacité en sortie, même si un peu de capacité en plus en sortie est presque toujours bénéfique). Si tu n'as pas d'infos 100-200µF en sortie est probablement bénéfique. Plus tu en mets sans rendre les condensateurs instables, mieux c'est.
Tu peux aussi mettre des condensateurs en entrée des convertisseurs : là c'est simple : plus tu en mets, mieux c'est. Par contre, sauf si tes fils sont longs ou fins, l'utilité est probablement limité (sauf si le problème est le PWM du moteur et pas la chute de tension en soit, dans quel cas, ça peut aider.
Si ta consommation en 12 et 5V est limitée, tu peux mettre une diode (dimensionnée pour assez de courant) suivit des condensateurs : de cette manière, les moteurs ne peuvent pas décharger ton condensateur, et il sert intégralement de réserve d'énergie pour tes convertisseurs : je penses que ça peut améliorer les choses.
Enfin, selon les cas, un "vrai" filtre (par exemple inductance + condensateur) peut être mis en entrée des convertisseurs. Par contre, c'est très difficile à dimensionner sans infos : pour bien le dimensionner, il faudrait connaitre l'amplitude et la durée des variations de la tension d'entrée, et les variations de la consommation de courant en sortie du convertisseur (et si possible leur durée). Plus l'inductance (L) et la capacité C sont grande, plus le filtrage des perturbations d'entrée sera efficace. Par contre, si L est trop grand (et C trop petit), alors les variations de courant en sortie entraîneront des chutes de tensions. Donc globalement, C aussi grand que possible, puis L un compromis entre filtrer les variations de tension en entrée vs les variations de courant en sortie