Bonjour,
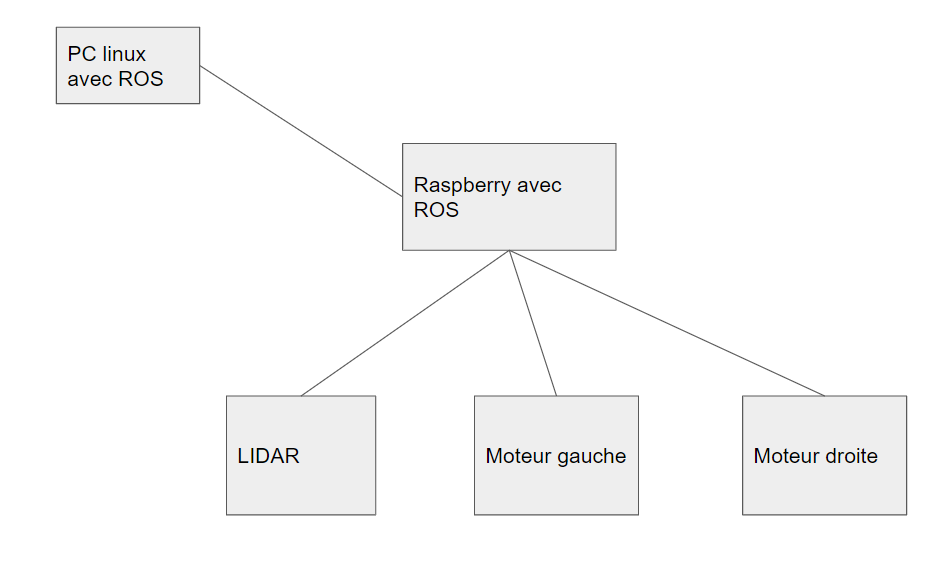
dans le but de me former à ROS et la technologie du LIDAR, je souhaite faire un robot roulant très simple (4 roues, 2 moteurs droite/gauche, LIDAR) téléopéré dans un premier temps. La structure que j'aimerai réaliser dans un premier temps ressemble à ça :
Du coup, deux parties compliqués pour moi :
- la partie ros
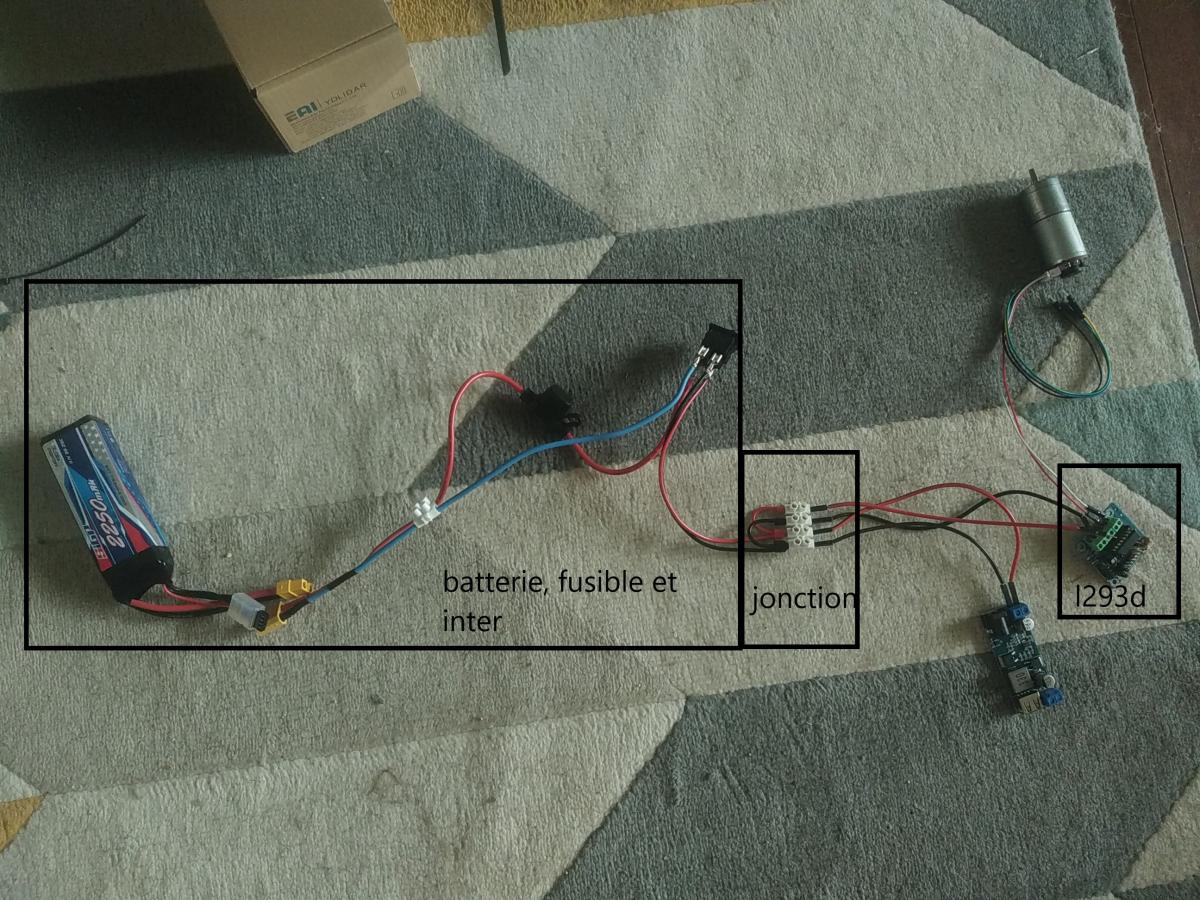
- la partie méca/elec avec les alim/commande moteur
C'est à dire tout ^^
J'aimerai ensuite récupérer les données du LIDAR et les visualiser sur un des outils de ROS (rviz?)
Avant que je m'attaque à ça, j'ai quand même des doutes sur mon schéma. De ce que je sais des LIDAR, c'est à dire pas grand chose, ils produisent une grosse quantité de données. Or, j'aimerai que la raspebrry communique en wifi avec mon PC, vous pensez que c'est envisageable ? J'ai pas fais les calculs mais j'imagine que ça dépend de la connexion aux internets de mon logis.