

Voila c'est partis je me lance dans la construction de mon premier robot sous arduino.
Apres la découverte de cette carte (voir présentation) je suis super motivé pour monter un robot sur une base de plateforme mobile 2 roues avec plusieurs capteurs et fonction pour une autonomie certaine.
Je vous propose donc de m'accompagner au long de ce projet a travers les différentes étapes, commandes des pièces, montage, problèmes, programmation et surtouts je compte sur votre aide précieuse car sans vous je ne pourrais pas je pense terminer ce projet, puis pourquoi pas continuer en faisant évoluer le robot ...
J'ai déjà une Arduino UNO REV3 et une Mega, je pense plutôt utiliser la mega sur le robot car la UNO me sert pour autre chose pour le moment
Voici une liste inachevée des articles que je compte commander.
-plateforme mobile 2 roues --- Evidement!
-2 codeurs --- Pour les différents calcules de positions et rotation
-Ball caster --- Avec bille plastique pour épargner mon carrelage.
Voici mes premières interrogations
Est ce que ce contrôleur peut convenir pour le châssis que j'ai choisi ?
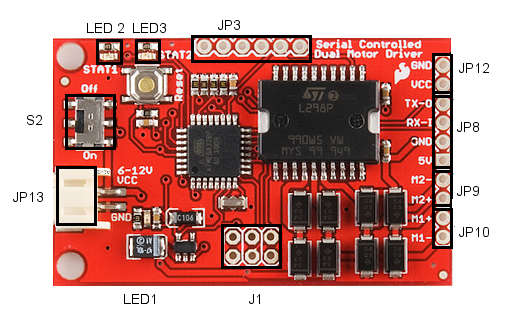
Platine de commande
Quelle alimentation ?
Je pensais utiliser une pile 9V pour la mega avec ce Boîtier coupleur de 1 pile 9V
Et ce boîtier de 4 piles AA pour les moteurs
Quel capteur pour faire de l'évitement d'obstacle ?
Quelle capteur pour de la détection de franchissement ? Sous entendu comme du suivit de ligne mais la je voudrai détecter le franchissement car le carrelage est parfait
 .
.Bon c'est déjà un bon début mais plein dautres questions à suivre.
Merci de votre attention.
@+





























{kind=link}