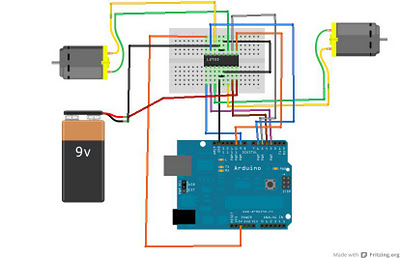
je voudrais realiser un robot controller par un joystick :
-pour ce qui est du budget il n'ai pas fixe mais je prefere qu'il ne depasse pas les 100 euros
-le robot aura pour base soit une base sur chenille tamya ou une base sur 4 roue qui serait tout terrain
-je voudrais mettre une caméra pour ne peux devoir laisser le robot dans mon champ de vision
-le joystick peut etre connecter a l'ordi pour pouvoir me servir de mon ecran avec la camera
ou un autre ecran pour que sa soit plus portatif ...
-je pense utiliser un module xbee ou bluetooth pour la communication ou autre module si vous connaisez quelque chose d'autre.
N'ayan que quelque base en se qui concerne la programmation et en electronique j'aurai besoin de méthode pour controller mon robot avec le joystick.
Je voudrais aussi savoir comment utiliser un caméra avec une arduino
en attendant votre réponse
cordialement Maxou