
Bonjour voici mon projet,
rien de bien original puisqu'il existe dans le commerce mais j'aime trop le diy.
A terme il s'agit de réaliser un lanceur de balle avec de nombreuses fonctions (hauteur de lancé, effet, programme d'une séquence etc ...)
la partie mécanique est prête pour la base, a savoir 2 moteurs (12v cc) qui entraînent des rouleaux et propulsent la balle.
Première étape : (à l'heure actuelle) : controler la vitesse de rotation des moteurs (a l'heure actuel ils sont controlés par des potentiomètres), soit ensemble, soit séparément (pour ajouter de l'effet) puis réaliser une séquence aléatoire (bornée par certaine vitesse de rotation des moteurs)
donc je bloque sur cette partie car je ne sais absolument pas par où attaquer n'y connaissant en robotique / programmation
Deuxième étape: ajouter un moteur pas à pas pour donner une direction et l'intégrer dans les séquences de jeu
Troisième étape : un dernier moteur pas à pas pour la hauteur
Quatrième étape : programmer des séquences de jeu construite sur les tactiques classique du tennis avec certaine variation dans les paramètres de jeu.
Si vous pouvez m'aiguiller pour ma première étape afin que je me forme et me documente avant de poursuivre.
Merci d'avance Alex
PS : mon background est le suivant :
diy audio (a tube, pedale transitor)
programmation c#
programmation de réseau de neurones artificiels pour la prévision de crue de rivière (mon DEA et ma thèse)

7 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 août 2013 - 10:21
Salut !
Sur ton projet je pense que je peux te donner quelques conseils
Par contre tout d'abord pour t'aider au mieux j'ai besoin d'avoir un peu plus d'info sur le point suivant
et plus particulièrement sur la partie électronique. Qu'est ce que tu utilises comme carte électrnonique entre tes potentiomètres et tes moteurs ? Car plusieurs solutions son possible. L'une d'elle pouvant être de simplement remplacer les potentiomètre par un micro-contrôleur disposant de sorties analogiques...
Dès que nous aurons réglé ce premier point nous pourrons alors nous attaquer aux points suivants Car pour aux aussi plusieurs solutions sont possibles =)
à bientôt !
Sur ton projet je pense que je peux te donner quelques conseils
Par contre tout d'abord pour t'aider au mieux j'ai besoin d'avoir un peu plus d'info sur le point suivant
la partie mécanique est prête pour la base, a savoir 2 moteurs (12v cc) qui entraînent des rouleaux et propulsent la balle.
Première étape : (à l'heure actuelle) : controler la vitesse de rotation des moteurs (a l'heure actuel ils sont controlés par des potentiomètres),
et plus particulièrement sur la partie électronique. Qu'est ce que tu utilises comme carte électrnonique entre tes potentiomètres et tes moteurs ? Car plusieurs solutions son possible. L'une d'elle pouvant être de simplement remplacer les potentiomètre par un micro-contrôleur disposant de sorties analogiques...
Dès que nous aurons réglé ce premier point nous pourrons alors nous attaquer aux points suivants
Car pour aux aussi plusieurs solutions sont possibles =)à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
alexso
-
- Membres
- 33 messages
Nouveau membre
Posté 29 août 2013 - 08:37
salut Mike et merci de t'intéresser à mon cas,
actuellement j'ai réaliser 2 montages (un pour chaque moteur) sur ce modèleA base de NE 555
en marge du poste j'ai découvert Arduino qui semble convenir pour mes besoins ?
ce que tu as en tête c'est (je réfléchis moi même a voix haute :
:
Merci en tout cas alex
actuellement j'ai réaliser 2 montages (un pour chaque moteur) sur ce modèleA base de NE 555
en marge du poste j'ai découvert Arduino qui semble convenir pour mes besoins ?
ce que tu as en tête c'est (je réfléchis moi même a voix haute
: - soit remplacer complètement mon électronique par une carte contrôleur
- soit juste le potentiomètre et attaquer directement
Merci en tout cas alex
#4
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 août 2013 - 03:55
ce que tu as en tête c'est (je réfléchis moi même a voix haute
- soit remplacer complètement mon électronique par une carte contrôleur
- soit juste le potentiomètre et attaquer directement
Merci en tout cas alex
Salut,
Oui c'est un peu ça
avec ton montage par contre tu ne pourras pas simplement remplacer le potentiomètre ( par contre il en existait plusieur autre ou tu aurais eu à le remplacer )
Par contre tu peux remplacer le NE555 par un microcontrôlleur qui te générera le signal PWM en fonction du code que tu mettra dedans.
Niveau micro contrôleur ensuite oui l'arduino c'est un choix qui peut convenir, assez facile d'acces pour faire des test ou autre mais après il faut savoir que ce n'est pas le seul choix. Tu peux aussi utiliser directement la puce programable ( le réel micro contrôlleur ) car une arduino c'est plus qu'un simple micro controlleur. Après ça dépend de jusqu'ou tyu veux aller en DIY car tu peux même te faire tes propres cartes électronique
à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#5
alexso
-
- Membres
- 33 messages
Nouveau membre
Posté 29 août 2013 - 08:07
merci Mike
j'ai regardé un peu au niveau de l'Arduino je pense que je peux faire tout ce que je veux avec mais peut être seris je limité plus tard
A savoir : contrôle de 3 moteurs balai + 2 pas à pas un écran de contrôle pour le choix du programme et c'est tout ... dans un premier temps.
- Quand tu me parle de micro contrôleur en directe je pourrais arrivé au même résultat ?
- Par où je dois commencé car là je n'y connaît pas grand chose ?
- Enfin, est ce que je peux me faire une carte contrôleur pour mes moteurs pilotables par Arduino ?
En te remerciant,
Alex
j'ai regardé un peu au niveau de l'Arduino je pense que je peux faire tout ce que je veux avec mais peut être seris je limité plus tard
A savoir : contrôle de 3 moteurs balai + 2 pas à pas un écran de contrôle pour le choix du programme et c'est tout ... dans un premier temps.
- Quand tu me parle de micro contrôleur en directe je pourrais arrivé au même résultat ?
- Par où je dois commencé car là je n'y connaît pas grand chose ?
- Enfin, est ce que je peux me faire une carte contrôleur pour mes moteurs pilotables par Arduino ?
En te remerciant,
Alex
#6
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 août 2013 - 10:42
merci Mike
j'ai regardé un peu au niveau de l'Arduino je pense que je peux faire tout ce que je veux avec mais peut être seris je limité plus tard
A savoir : contrôle de 3 moteurs balai + 2 pas à pas un écran de contrôle pour le choix du programme et c'est tout ... dans un premier temps.
- Quand tu me parle de micro contrôleur en directe je pourrais arrivé au même résultat ?
- Par où je dois commencé car là je n'y connaît pas grand chose ?
- Enfin, est ce que je peux me faire une carte contrôleur pour mes moteurs pilotables par Arduino ?
En te remerciant,
Alex
Je pense aussi que tu peux faire ce que tu souhaite avec une arduino. Après comme tu le dis tu seras peut être limité plus tard.
Ensuite quand je parle d'utiliser directement un micro-contrôleur c'est d'utiliser par exemple l'atmel328P seul au lieu d'utiliser une arduino dans laquel il y a entre autre l'atmel. Par contre après ça demande aussi d'ajouter d'autres composants autour de l'atmel. Pour plus d'information de ce côté là je t'invite à faire une recherche du côté des mots clefs "standalone atmel 328P arduino" avec google.
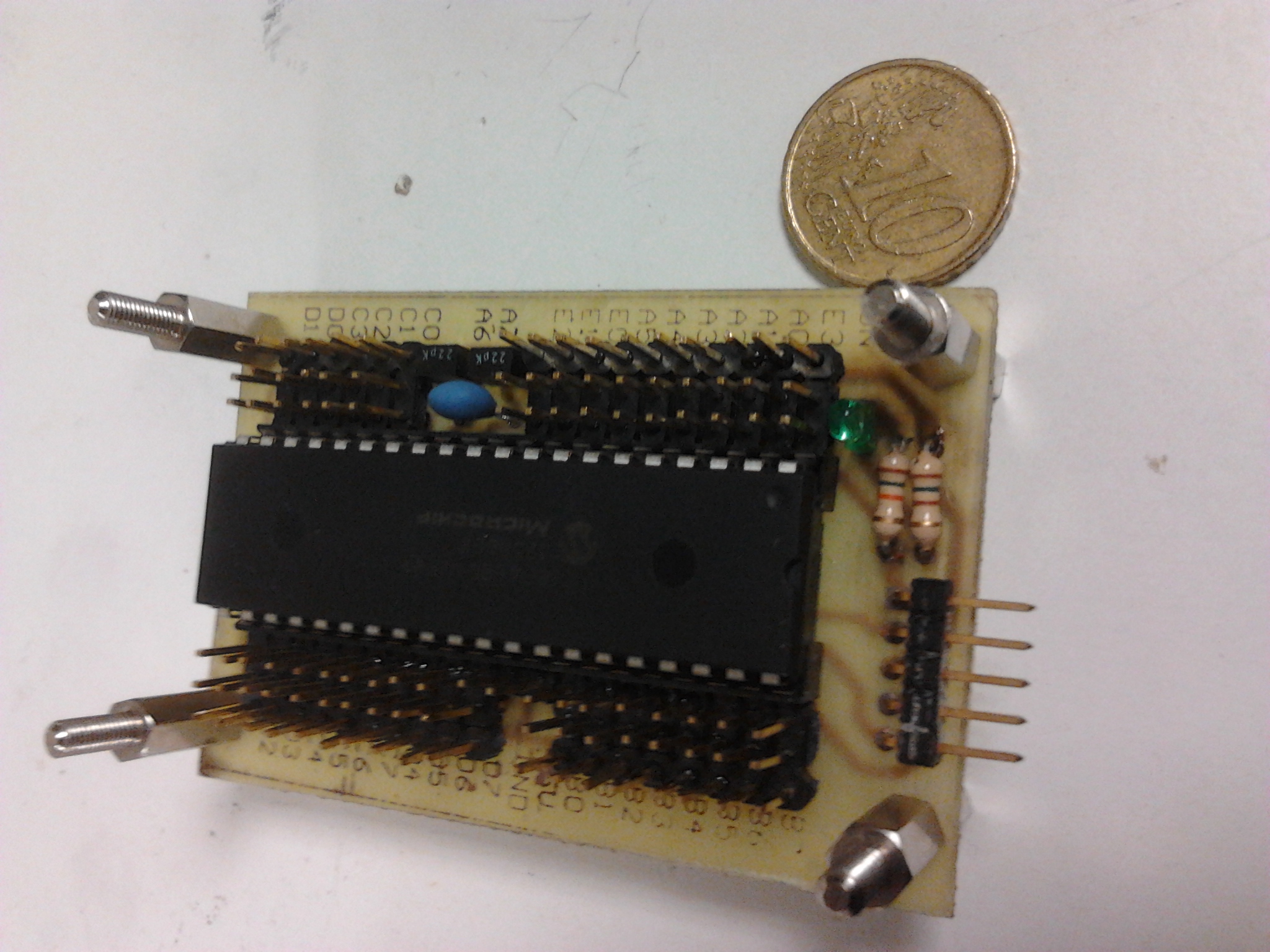
Après il n'y a pas que les atmel. Il y a aussi les pic. Personellement j'utilise des pic et je fais mes propres cartes électronique.
En gros l'avantage de cette technique tu payes une fois le programmateur ( Un pickit3 pour ma par coutant environ 36euros pour programmer mes pics) et ensuite tu payes que les microcontroleurs qui eux ne coutent que quelques euros. Ce n'est donc rentable qu'à un peu plus long terme si tu envisage de programmer plusieurs microcontrôleur. ( car si tu achète une arduino à chaque fois que tu fais un projet ça commence à couter cher quand tu es à ton 5 ème projet ^^ ) mais je te déconseille cela si tu compte juste faire cet unique projet en "robotique". Et puis une arduino c'est quand même un peu plus facile pour commencer... ( d'après ce que tout le monde en dis en tout cas ) Perso si tu choisis les pic je pourrais plus facilement te donner un coup de pouce. ( je n'utilise pas d'arduino ni d'atmel )
Pour te donner un exemple voici une des mes cartes de développement pour pic.
Ensuite par où commencé ? ça c'est une bonne question. Personnellement je pense qu'il faut commencer par faire un choix : soit commencer par utiliser une platine arduino soit utiliser directement les microcontrolleurs soit atmel soit pic.
Remarques :
1)Certains arrive à programmer leurs atmel via une arduino du coup tu peux acheter une arduino puis ensuite continuer en utilisant des atmel que tu programme avec ta arduino. ( mais je ne sais pas comment ils font je n'utilise pas d'arduino ) je te laisse chercher sur le forum il y a pas mal d'utilisateurs d'arduino. Sinon il doit exister des programmateurs d'atmel mais je n'en connais pas
2)Si tu choisis pic je peux assez facilement t'aider voir même te fournir une platine comme celle en photo ou un peu plus adaptées à tes besoins avec des exemples de code et autre.
Une fois que tu as choisis il faut choisir et apprendre le langage de programmation.
Si tu choisis l'arduino c'est simple il t'est commis d'office.
Si tu veux programmer un atmel via une arduino idem.
Pour programmer un atmel vi programmateur je sais pas.
Pour programmer un pic tu as deux possibilitées. Programmer en assembleur et pour cela il y a un super mais énorme cour donner gratuitement sur le web au format PDF par un certains BigOnOff sur le web. ( Si tu veux faire de l'assembleur c'est la voie je pense ! il a écrit des centaines et des centaines de pages ! Sinon tu peux aussi programmer en C. ( perso c'est ce que je fais et je peux t'aider de ce côté là. )
Une fois que c'est fait il faut s'habituer un peut à jouer avec les bêtes que tu auras choisis, faire clignoter des leds, lire l'état des boutons etc...
Quand tu en seras là ( ce qui peut arriver très vite en fonction de tes choix) tu pourras facilement remplacer le NE555 par une patte du pic
Concernant le dernier point : " est ce que je peux me faire une carte contrôleur pour mes moteurs pilotables par Arduino " Oui absolument. De même la même carte pourra servir pour piloter tes moteurs via directement un atmel ou un pic. Par contre tu peux aussi créer une carte qui contient déjà un atmel ou un pic pour piloter tes moteurs.
Je te laisse méditer sur tout ça !
à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#7
alexso
-
- Membres
- 33 messages
Nouveau membre
Posté 30 août 2013 - 07:00
Mike comment te dire merci,
écoute l'ensemble des éléments que tu m'as fourni sont très clair.
J'ai regardé par pas de mal de petite chose sur le web en fonction des différents éléments que tu m'as donné.
J'envisage dans un premier temps de prendre une carte Arduino et de créer des cartes de contrôle pour mes moteurs.
Dans un second temps il n'est pas exclu que je migre vers des PIC; d'autant que je connais assez bien le C, FORTRAN pour les algos scientifiques. Etant assez nouveau dans le domaine j suis rassuré par l'utilisation d'Arduino dans un premier temps (j'ai d'ailleurs trouvé des exemples de cartes pour mes moteurs).
Tout n'est pas fixé mais je pense me commander une carte Arduino pour tester un peu.
Merci beaucoup,
je reviens sur le Forum dès que j'ai avancé
Alex
écoute l'ensemble des éléments que tu m'as fourni sont très clair.
J'ai regardé par pas de mal de petite chose sur le web en fonction des différents éléments que tu m'as donné.
J'envisage dans un premier temps de prendre une carte Arduino et de créer des cartes de contrôle pour mes moteurs.
Dans un second temps il n'est pas exclu que je migre vers des PIC; d'autant que je connais assez bien le C, FORTRAN pour les algos scientifiques. Etant assez nouveau dans le domaine j suis rassuré par l'utilisation d'Arduino dans un premier temps (j'ai d'ailleurs trouvé des exemples de cartes pour mes moteurs).
Tout n'est pas fixé mais je pense me commander une carte Arduino pour tester un peu.
Merci beaucoup,
je reviens sur le Forum dès que j'ai avancé
Alex
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

