Mon contenu
Mon contenu Homme
Homme


 Posté par
Posté par Le problème vient du code du coup
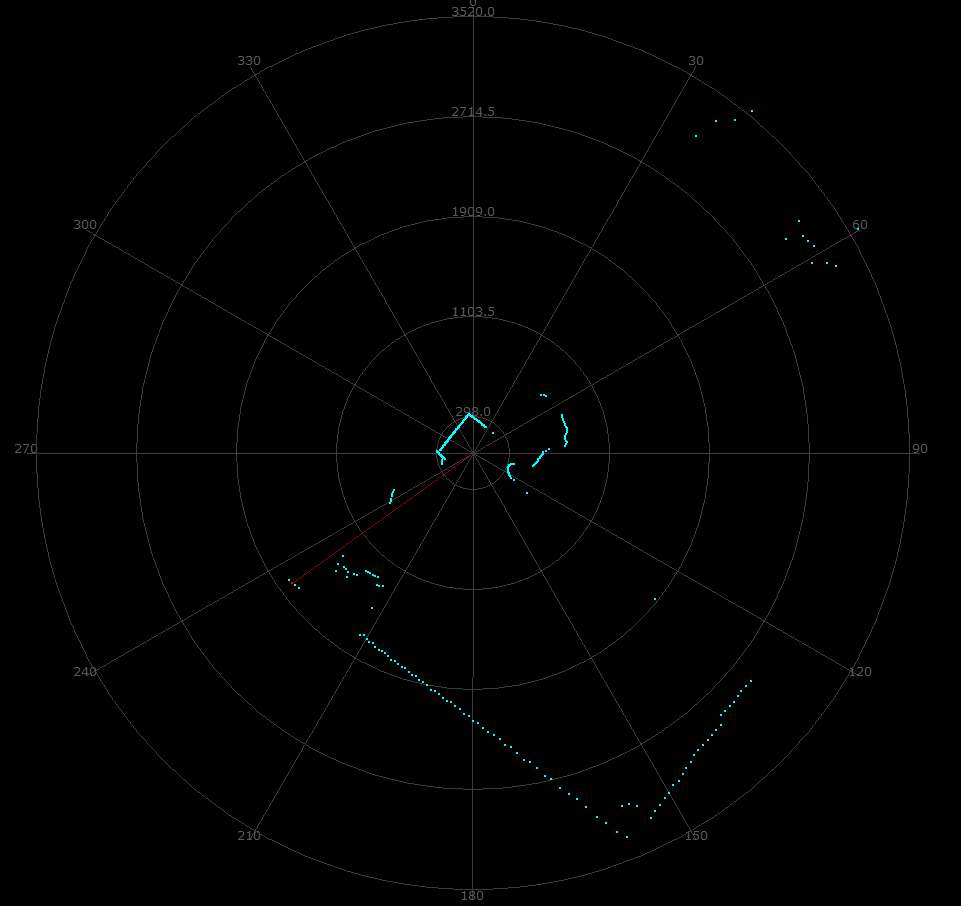
Sur le logiciel pas de problème ( on voit bien l'obstacle, moi et le coin de la pièce )
Je vais me pencher un peu sur la bibliothèque voir si il n'y a pas un problème de fréquence d'envoi des données ( qui est plus rapide sur le A2 que sur le A1 pour lequel la bibli a été codée )