

 Mon contenu
Mon contenu Homme
Homme





Bonjour à tous.
J'ouvre ce post pour connaitre vos avis et autres feed-backs sur les modules FPV .
Pour rappel, FPV : First Person View .
Cela sert par exemple en course de drones où le pilote voit en live ce qui se passe grâce à une caméra dont la vidéo est retransmise par ondes.
Certains utilisent ce genre de module ?
Références ? Avis positif/négatif .
J'ai lu qu'il y a différentes fréquences : comment choisir ?
Dans l'idée, je voudrais récupérer le flux vidéo de mon robot qui pourrait se balader sur mon terrain +/- 100m autour de la maison..
Merci !
Sujets que j'ai initiés
Bases pour comprendre le GPS
15 mai 2019 - 08:12
Bonjour à tous .
Je cherche un site pour apprendre/comprendre tout ce qui concerne le GPS .
Mon niveau dans ce domaine est proche de zéro donc j'aimerais acquérir des connaissances sur tout ce qui est (dans le désordre) : latitude , longitude , azimuts , cap , décodage de trames etc etc
Hormis Wikipedia , avez vous des liens à partager qui explique plus ou moins "vulgairement" la théorie ?
En pratique , j'utiliserais un module GPS type adafruit avec une bibliothèque (surement TinyGps) avec des fonctions toutes prêtes mais
je voudrais comprendre comment tout cela marche pour palier à d'éventuels problèmes qui pourraient arriver  !
!
Le but final étant que Hashtag, mon robot patrouilleur, puisse suivre un trajet composé de plusieurs coordonnées GPS .
D'avance , merci !
Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
10 avril 2019 - 06:47
Salut à tous .
Plus de 2 ans après mon inscription, je me lance dans l'aventure du robot .
C'est mon premier et son but principal est initiatique : je ferais des erreurs, je ferais marche arrière (ou pas) mais je veux apprendre !
Je le souhaite évolutif au fur et à mesure de mes envies.
L'objectif d'Hashtag est de patrouiller sur mon terrain en autonomie .
Je compte faire un chemin de coordonnées GPS et le robot devra les suivre pour faire sa ronde et retourner à sa base de rechargement.
Pour l'instant il est en 4 roues motrices et a un chassis en # d'où son nom ...
Je suis nul en découpe donc pas question de modifier la longueur de mes profilés .
.
Niveau matos dans le désordre, on a actuellement :
*Electronique :
- Ramps 1.4 + Mega
- Moteur PàP type Nema 17 x 4
- module GY-271 : compas électronique
- module GPS Adafruit
- Batterie Li-ion 12V 20000mAh rechargeable (en attente de réception)
*Mécanique :
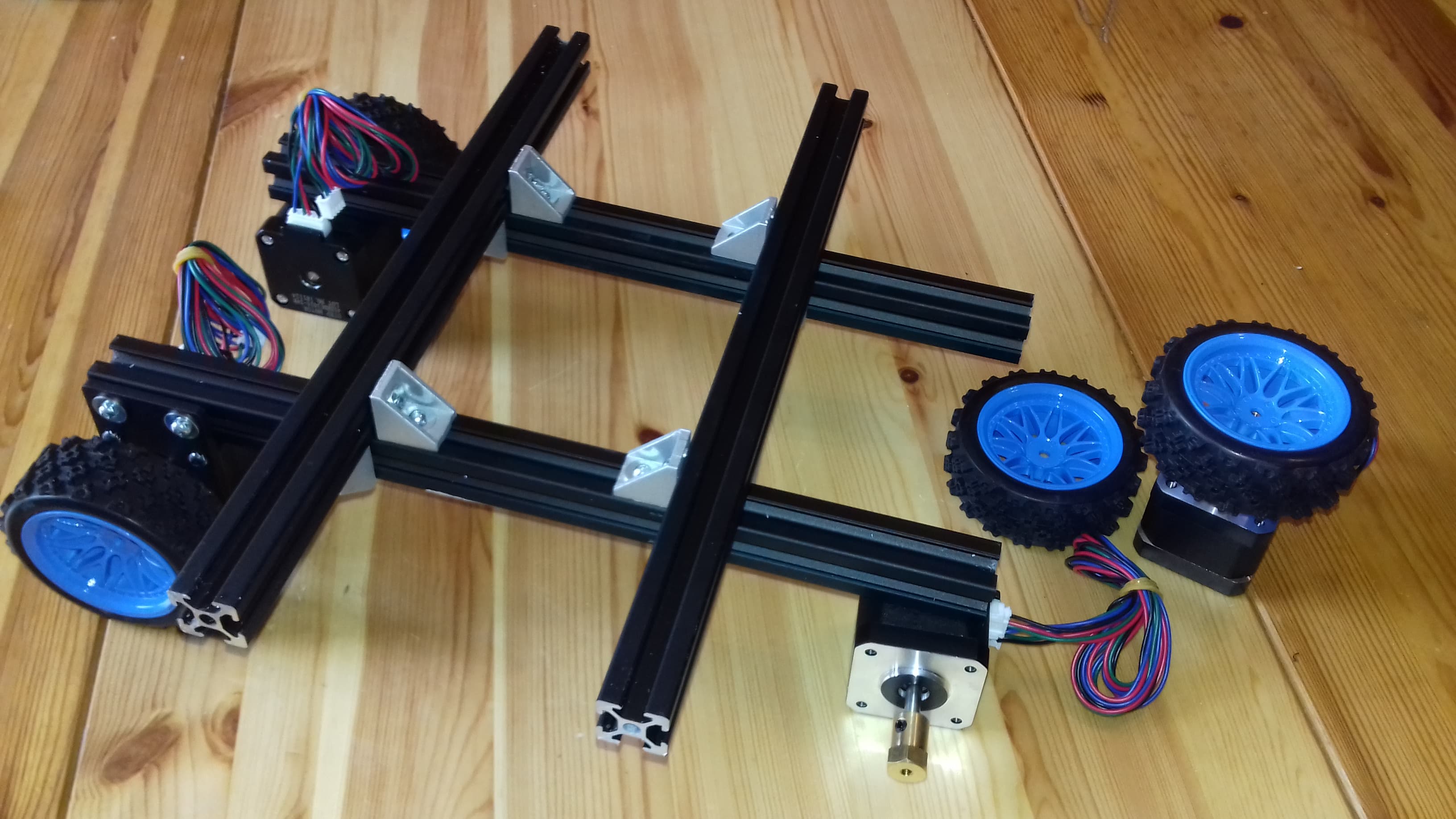
- châssis en profilé alu 20x20 type Imprimante 3D
- équerres en alu
- roues de 4x4 de modélisme ( à changer ??)
- coupleurs entre les Nema 17 et les roues
- support pour Nema 17 en alu (il m'en manque 2)
Vite fait quelques étapes de développement prévues/réalisées :
Ca ressemble à ça pour l'instant :
A plus !
Plus de 2 ans après mon inscription, je me lance dans l'aventure du robot .
C'est mon premier et son but principal est initiatique : je ferais des erreurs, je ferais marche arrière (ou pas) mais je veux apprendre !
Je le souhaite évolutif au fur et à mesure de mes envies.
L'objectif d'Hashtag est de patrouiller sur mon terrain en autonomie .
Je compte faire un chemin de coordonnées GPS et le robot devra les suivre pour faire sa ronde et retourner à sa base de rechargement.
Pour l'instant il est en 4 roues motrices et a un chassis en # d'où son nom ...
Je suis nul en découpe donc pas question de modifier la longueur de mes profilés
.Niveau matos dans le désordre, on a actuellement :
*Electronique :
- Ramps 1.4 + Mega
- Moteur PàP type Nema 17 x 4
- module GY-271 : compas électronique
- module GPS Adafruit
- Batterie Li-ion 12V 20000mAh rechargeable (en attente de réception)
*Mécanique :
- châssis en profilé alu 20x20 type Imprimante 3D
- équerres en alu
- roues de 4x4 de modélisme ( à changer ??)
- coupleurs entre les Nema 17 et les roues
- support pour Nema 17 en alu (il m'en manque 2)
Vite fait quelques étapes de développement prévues/réalisées :
[OK] / [ à faire ] / [ en cours ] / [ pour plus tard]
- Contrôle des Nema 17
- Prise en main du GY-271
- Montage du chassis , moteurs et roues
- Prise en main du module GPS
- Coder le suivi d'un cap
- Intégrer l'électronique
- Etablir une liste de coordonnées GPS
- Mettre en place un système de détection/évitement d'obstacles
- Mettre en place 2 ou 3 capteurs
- Mettre en place un éclairage (pour le debug à distance ..et le fun)
- Retour d'info via ondes radios ???
- Intégration d'un Rpi + Caméra
- Habillage en impression 3D
- Améliorer/Augmenter la garde au sol
Ca ressemble à ça pour l'instant :

A plus !
Bonjour !
01 août 2016 - 01:05
Salut à tous !
NoNo, 28 ans, j'habite dans le Calvados .
J'arrive ici car j'aimerais concevoir mon premier robot et je suis tombé sur cette communauté durant mes recherches .
J'ai déja un peu "d'expérience" avec divers projets Arduino mais sans aucune partie mécanique : principalement du monitoring/régulation de temperature .
Je ferais un topic dédié plutard mais voici une petite présentation de mon futur robot !
J'aimerais fabriquer un robot "patrouilleur" qui puisse se déplacer sur mon terrain avec un parcours prédéterminé (dans un premier temps) . Je pense partir sur une base de voiture télécommandée ( un jouet , pas du modélisme ) , un modèle tout terrain , commandée par un Arduino . J'aimerais aussi intégrer un rechargement via des panneaux solaires .
Bref j'ai de quoi faire !
A+
NoNo, 28 ans, j'habite dans le Calvados .
J'arrive ici car j'aimerais concevoir mon premier robot et je suis tombé sur cette communauté durant mes recherches .
J'ai déja un peu "d'expérience" avec divers projets Arduino mais sans aucune partie mécanique : principalement du monitoring/régulation de temperature
.Je ferais un topic dédié plutard mais voici une petite présentation de mon futur robot !
J'aimerais fabriquer un robot "patrouilleur" qui puisse se déplacer sur mon terrain avec un parcours prédéterminé (dans un premier temps) . Je pense partir sur une base de voiture télécommandée ( un jouet , pas du modélisme ) , un modèle tout terrain , commandée par un Arduino . J'aimerais aussi intégrer un rechargement via des panneaux solaires .
Bref j'ai de quoi faire
!A+




