Robot VIZZ

Descriptifi :
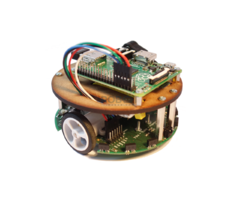
Utilisant deux servomoteur pour sa locomotion, trois capteurs infra-rouge modulés et deux non-modulé, un capteur de position et un PIC basic pour la partie commande et traitement des informations, ce petit robot semble très complet et d'une conception très soignée pour une réalisation amateur.
Quelques caracteristiques
Dimension inférieure à 120mm de diamètre
Coût inférieur à 150?
Fonction de type "résolveur de labyrinthe"
Suivit de ligne
Pupitre de commande avec écran LCD, touches et Buzzer
Asservissement en position
Possibilité d'évolutions ultérieures
Facilité d'utilisation (prise de charge et de prog, design)
Réalisation simple (circuits simple face, pas d'usinage)
 Loading
Loading
Digital Goods
Robots similaires
-
 PLR1Base roulante - Saint Paul (Ile de la réunion) - 21/04/2016
PLR1Base roulante - Saint Paul (Ile de la réunion) - 21/04/2016Bonjour. Voici mon premier Robot nommé PLR1 (prononcé pèlerin). Celui-ci est basé sur une base roulante programmable de chez Parallax (ActivityBot). J'ai ajouté une carte raspberry pi, une batterie, des capteurs, un...
-
 Le robot à base d'une voiture RCBase roulante - - 08/04/2016
Le robot à base d'une voiture RCBase roulante - - 08/04/2016Caractéristiques techniques 1 Moteur de type "540", 1 Chassis 4*4 avec différenciels avant et arriere, Amortisseurs hydrauliques fournis avec le Kit! 1 Handy-Board à microprocesseur 68HC11 à 8MHz 1 Chargeur-Board pour la l...
-
 MRPi1Base roulante - Rennes (Bretagne) - 27/03/2016
MRPi1Base roulante - Rennes (Bretagne) - 27/03/2016Le robot MRPi1 est un robot Open source controler par une carte nano-ordinateur Raspberry Pi A+. La carte Raspberry Pi A+ permet d'avoir un Linux embarqué (Raspian) sur le robot et une programmation haut-niveau. Le robot est donc programmable ...
Commentaires
Laissez un commentaire (le spam et les messages offensants seront supprimés)