MRPi1 Rennes
- Adresse: Rennes, Bretagne, FRANCE

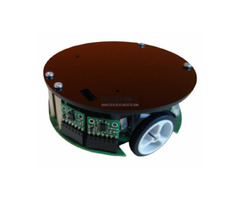
Le robot MRPi1 est un robot Open source controler par une carte nano-ordinateur Raspberry Pi A+. La carte Raspberry Pi A+ permet d'avoir un Linux embarqué (Raspian) sur le robot et une programmation haut-niveau. Le robot est donc programmable dans les langages comme le Python, C, C++, Java, ...
Un microcontrolleur de chez ST (STM32F407VET6) permet de gérer tous le bas niveau du robot :
- Controle des moteurs à courant continu : PWM
- Aquisition des encodeurs en quadrature : TIMER
- Régulation des moteurs en vitesse et position/orientation : double PID numérique
- Conversion analogique/numérique 12 bits,
- Traitement numérique des capteurs (filtrage numérique),
- Gestion de la batterie lipo,
- Gestion des leds,
- Communication série avec la carte Raspberry Pi A+ : UART 8 bits 115200 baud
- Booster 3.7V -> +5V (alimentation Raspberry Pi)
Ce microcontrolleur de la famille ARM Cortex M4 est programmable avec un logiciel Open source : CoIDE. Il est programmé en langage C avec la librairie Cube de chez ST.
Pourquoi une Raspberry Pi A+ ?
Cette carte est dédié au système embarqué :
- Consommation électrique minimal,
- Taille réduite,
Le robot est compatible avec la carte Pi zero. La Pi Zero ne permet pas d'avoir accès à l'haut-parleur et nécessite un cable usb pour la clé wifi.
Il est équipé de :
- Deux moteurs CC avec encodeurs en quadrature,
- Une clé Wifi compatible AP pour la programmation sans fil ou le controle,
- Un haut parleur 8 ohm accessible avec le port jack de la carte Raspberry Pi,
- Six capteurs de proximité infrarouge analogique de type TCRT1000
- Trois capteurs de sols infrarouge de type QRE1113GR,
- Un récepteur infrarouge de 38 Khz RC5,
- Un microcontrôleur STM32F407 avec calcul flottant (FPU),
- Un connecteur d'extension,
- Un capteur de température de type thermistance,
- Batterie lipo 3.7V 2000 mAH pour une autonomie d'environ 2h,
Extensions possible :
- Camera Pi 8 Mega Pixel
- Module hardware (ultrason, servomoteurs, ...)
- Module série de type module bluethooth ou Xbee : pour par exemple faire communiqué plusieurs robots.
Personnalisable :
- Support en bois pour une facilité de modification,
- Second étage possible.
Un connecteur avec 12 pins male est placé sur la carte de controle pour les modules suplémentaires. De plus, il est possible d'ajouter un étage.
Les applications :
- Suivie de ligne avec 3 capteurs de sols,
- Controle par smartphone, PC ou tablette de type access point,
- Gestion des obstacles avec les capteurs de proximité
- Traitement d'images avec la camera Pi,
- Asservissement en position/orientation,
- Synthèse vocale, jouer de la musique, lire des fichiers mp3 ou wav
Taille du robot MRPi1:
- 10 cm de diametre,
- 7 cm de hauteur,
- forme circulaire afin de se déplacer facilement dans toutes les directions,
Licence du robot logicielle/matériels :
- MIT
- CC-BY-SA
Site web du projet : http://fr.macerobotics.com/
Github: https://github.com/macerobotics
Tutoriels : http://fr.macerobotics.com/developpeur/tutoriels/
 Loading
Loading

Digital Goods
Robots similaires
-
 Robot MR-PicoBase roulante - (Bretagne) - 24/03/2023
Robot MR-PicoBase roulante - (Bretagne) - 24/03/2023Le robot MR-Pico est un petit robot mobile Open Source programmable. Il est contrôler par une carte Raspberry Pi Pico. Spécification techniques : API Open source : python Deux moteurs à courant continu avec encodeurs en quadrature...
-
 RattlerBase roulante - - 07/10/2019
RattlerBase roulante - - 07/10/2019Rattler est une voiture de course radiocommandée rendue autonome pour participer à la Toulouse Robot Race 2019 avec seulement quelques capteurs TF Mini plus, et une arduino mega . Elle ne s'est pas illustrée...
-
 RobilBase roulante - - 28/05/2019
RobilBase roulante - - 28/05/2019Robil est un robot équipé de 4 roues mécanum, d'une tête pan tilt équipée d'une caméra avec vision nocturne, d'un télémètre capable de mesurer jusqu'à 12m et d'un pointeur la...
Commentaires
Laissez un commentaire (le spam et les messages offensants seront supprimés)