Et voici une tête ! qu'est ce que vous en pensez ?
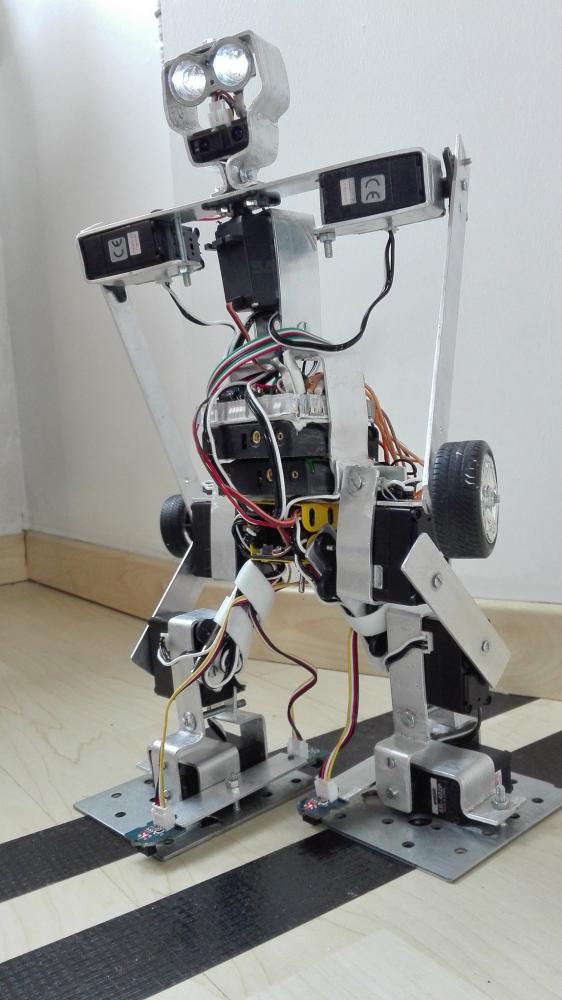
Elle contient 2 leds pour... pour le fun  et 1 capteur de distance IR pour un éventuel combat en "totale autonomie"
et 1 capteur de distance IR pour un éventuel combat en "totale autonomie"
Je me demande si je ne vais pas abaisser les leds pour avoir un petit front sur lequel je pourrais attacher un bandeau rouge à la Rambo !
A défaut d'imprimante 3D je me suis amusé à forger cette "forme de tête" à l'ancienne avec 2 paires de pinces, 1 marteau, une scie et un étau :kez_13:
J'ai refait aussi une partie des pieds en plus propre. J'ai ajouté sur chaque pied un support pour porter 2 capteurs IR.
Pour l'instant je vais essayer avec cette disposition ; les capteurs sont alignés sur les lignes de la piste.
En gros je me dis que si le robot part en diagonal, il pourra détecter le franchissement des lignes et son orientation en comparant ce qui se passe devant et derrière...
Maintenant je n'ai plus que 6j pour tester et trouver le bon algo qui permettra d'aller au bout des 10 mètres !!
La bonne nouvelle c'est qu'avec ses nouveaux pieds, sans utiliser ses capteurs il arrive déjà à marcher bien droit sur la ligne blanche sur
environ 4 mètres (sur un sol bien plat...). A l'extérieur, en condition réel bien sûr ce ne sera pas aussi simple.
A suivre !











 #teasing =)
#teasing =) 



 c'est un super module
c'est un super module
 (le magnétomètre du BNO055 ma beaucoup servi car trop difficile de suivre la ligne sur les pavés)
(le magnétomètre du BNO055 ma beaucoup servi car trop difficile de suivre la ligne sur les pavés)











