Mon installation actuelle de domotique est plus pour de la vidéosurveillance que de la domotique ( Controlleur Zwave VERA , Caméra IP , détecteurs de mouvement , détecteurs d'ouverture de porte/fenetre , détecteur d'ouverture de porte de garage , détecteurs de mouvements multi-fonctions avec relevé de température et humidité , modules interrupteurs et prises de courant connectées).
Mon but est de migrer mon installation domotique sur une plateforme RPI3 + Logiciel Domoticz et d'y intégrer mon robot mobile télécommandé .... http://www.robot-maker.com/forum/topic/10346-projet-mon-ugv1-mon-robot-de-surveillance-mobile-et-telecommande/
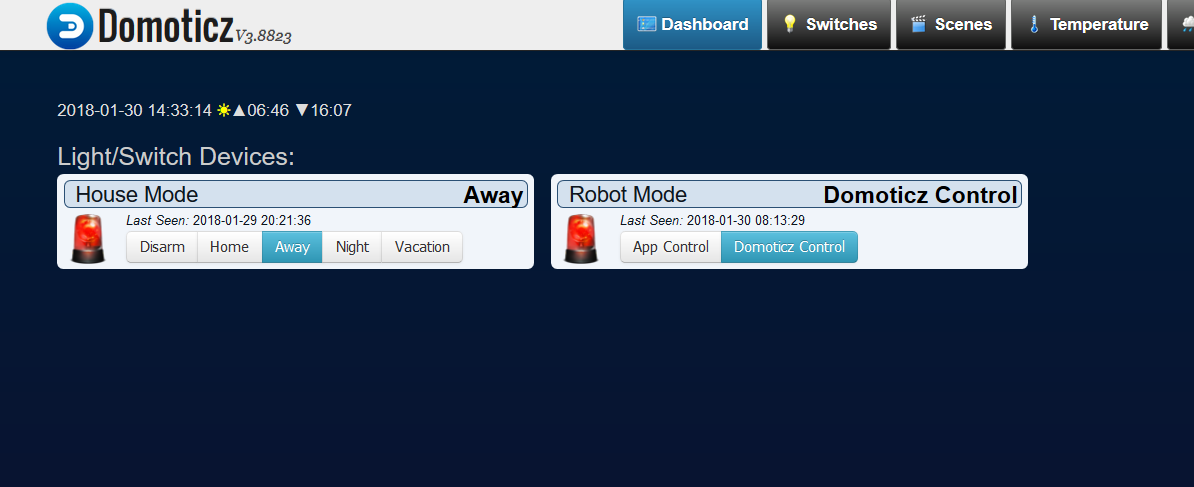
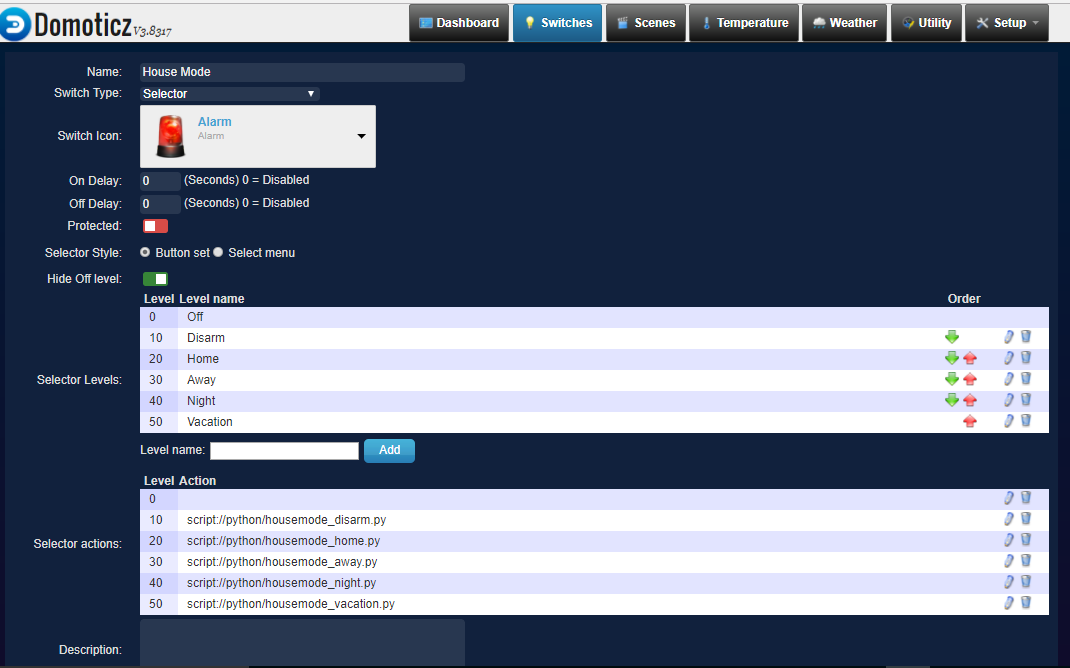
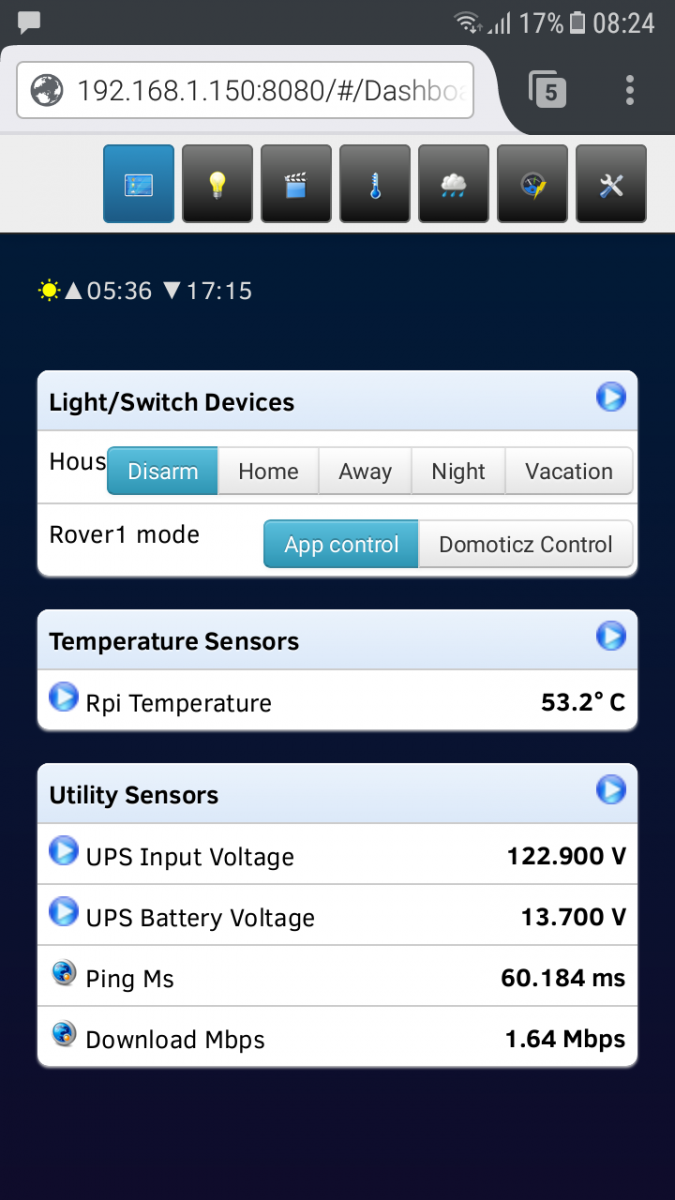
1) L'interface du robot au niveau de la domotique se fait à l'aide de switch selector :
- Un switch selector "House Mode" avec des actions définies en fonction de l'état de ma présence dans la maison DISARM , HOME , AWAY , NIGHT , VACATION
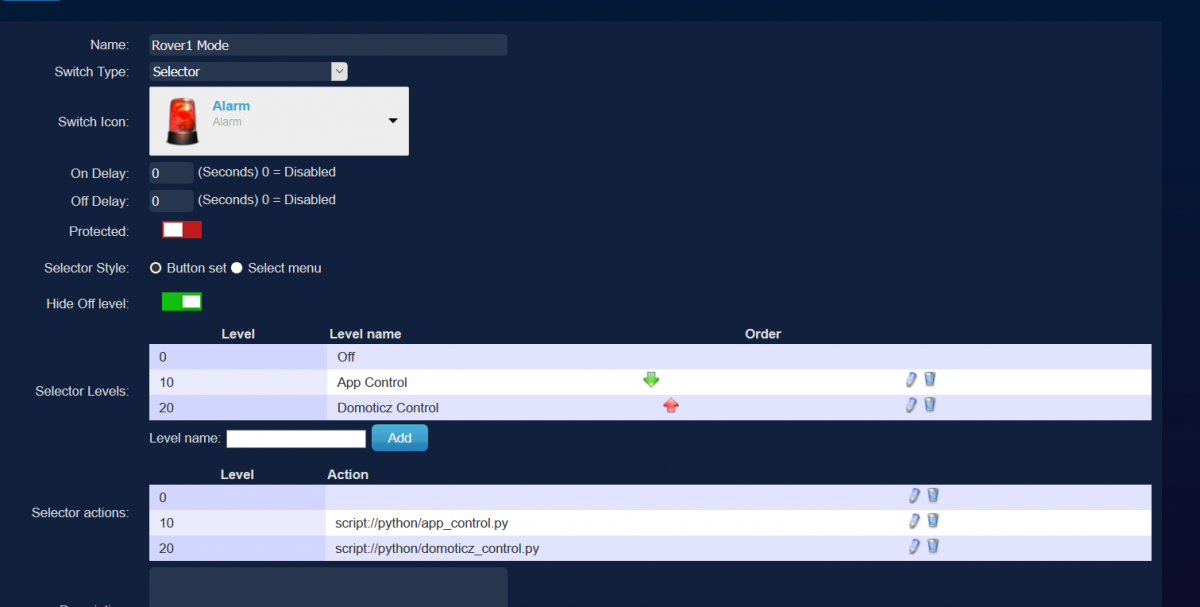
- un switch selector "Rover1 mode" pour indiquer au logiciel Domiicz de controler ou pas le robot.
En conclusion , le robot sera controlé par l'app Android si House Mode =! Disarm et Rover1 = App Control et sur évènement de détection de mouvement le logiciel domotique va donner les instructions au robot pour aller dans la zone du détecteur de mouvement qui a été actionné
2) Le robot pourra également fonctionner en autonome avec une fonction détection de mouvement :
- Envoi de mail d'alerte en cas d'évènement de détection de mouvement par le robot ( script python lancé par motion )
- Envoi par mail de x photos ( une vidéo serait mieux mais trop long à transférer vers une adresse mail ou Dropbox. ) par évènement de détection de mouvement... qui peuvent etre rapprochés dans la vrai vie. ( ( script python lancé par motion )
Note : Le but de l'envoi par mail est de ne pas stocker en local les photos prises lors de l'évènement mais cela pourrait etre aussi par FTP ..
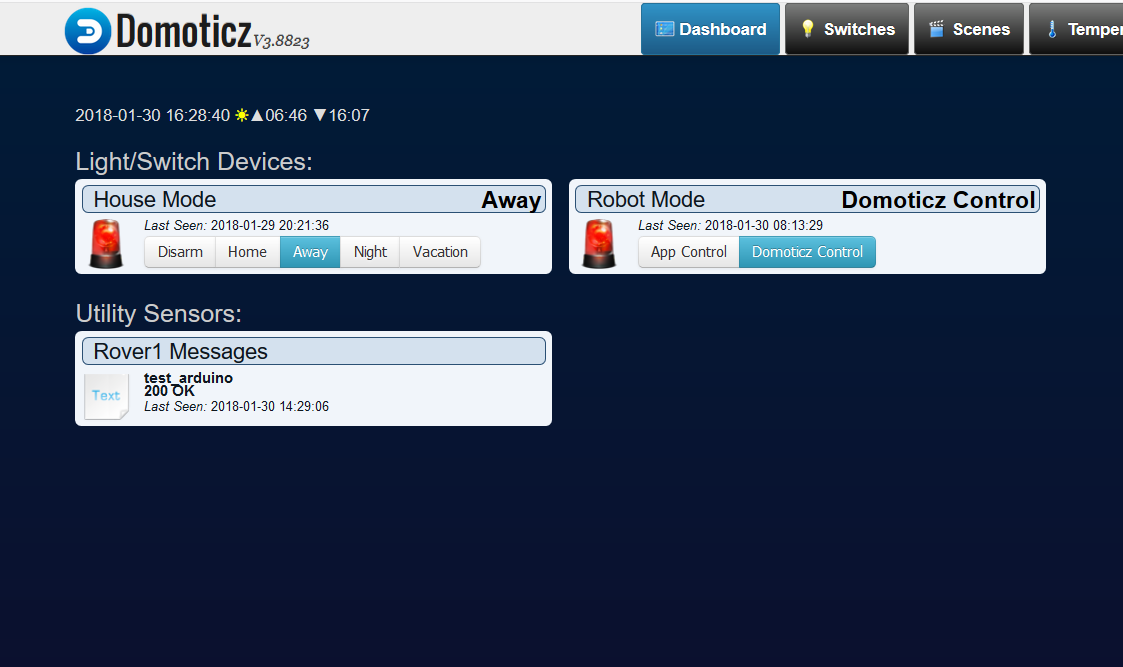
Le dashboard de l'app Android "Domoticz" montrant l'interface de décision de pilotage du robot (app android ou domoticz)
Fonctions réalisées
- Switch selector House Mode et Rover1 Mode et gestion du controle du robot par Domoticz
- HTTP Interface de Domoticz avec le robot
ToDoList
-
-
Modifié par gerardosamara, 31 janvier 2018 - 09:15 .