Bonjour à tous ,
j'ai pour projet de fabriquer un robot qui ce déplacerait avec des chenille qui aurait un bras articulé , des capteur ultrasonique pour éviter les obstacle , une caméra fpv pour avoir un retour vidéo des flash led pour les endroits sombres .
J'aimerais que ce robot soit contrôler par bluetooth et qu'il soit autonome . Peut être lui rajouter une carte gps pour lui donner des waypoint avec instructions à chaque waypoint par exemple .
Peut être que j'en demande trop pour un premier projet surtout que mes compétences sont nul en robotique mais je suis très motivée et à l'écoute de vos propositions d'aide .
Mon budget , ce fera pas à pas de mon projet je suis assez déterminer pour fabriquer mon premier robot donc je n'hésiterai pas à débourser si cela et nécessaire
Di Rocco Marc


Projet robot chenille
#1

-
- Membres
- 11 messages
Nouveau membre
- Gender:Male
- Location:Languedoc Roussillon France
Posté 10 juin 2018 - 01:34
#2
-

- Modérateur
-

- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 10 juin 2018 - 02:02
Et bien pour commencer et te faire la main une base avec chenilles et des capteurs ultrasons c'est déjà pas mal, surtout si tu veux le rendre autonome pour qu'il évite les obstacles tout seul, à cela va falloir que tu rajoutes un microcontrôleur de type Arduino car pour faire bouger tout ça va bien falloir programmer sur quelque chose, déjà ce sera pas mal et te permettra de savoir si cela te convient avant d'allez plus loin et d'investir plus d'argent.
Les membres les plus expérimentés seront mieux placé pour te renseigner sur tous le matos nécessaire pour commencer.
Commence doucement et développe ton robot au fur et à mesure.
PS : je t'ai dis sur ta présentation d'apprendre le Python éventuellement, mais pour l'instant le mieux sera d'apprendre le langage Arduino.

#3
-

- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 03:36
Pourquoi le télécommander en Bluetooth, la portée théorique est plutôt limitée ?
Si ce n'est pas indiscret, que veux-tu faire de ton robot ? (en fonction de l'utilisation que tu veux en faire tu devra faire des choix différents.)
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#4
-
- Membres
- 11 messages
Nouveau membre
- Gender:Male
- Location:Languedoc Roussillon France
Posté 10 juin 2018 - 03:46
#5
-
- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 03:53
Ok, je n'ai rien contre le Bluetooth mis à part sa portée qui n'est peut-être pas un problème pour toi, je ne peux pas dire si c'est plus simple ou pas qu'un autre mode de communication, je ne suis pas encore arrivé à ce point.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#7
-
- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 04:14
Pour mon robot je choisi le WIFI, c'est le seul qui me permet une bonne portée et si nécessaire l'ajout d'un "relais" (ou répétiteur). Pour moi la portée est très importante puisque je piloterai le robot sans le voir, juste avec le retour vidéo.
Je vais l'utiliser pour piloter mon robot mais aussi pour le retour d'information (télémétrie), pour le retour vidéo je ne sais pas encore ce que je vais utiliser.
Edit : pour toi tout dépend si tu le télécommande de près ou de loin, il y aussi d'autres moyen de communication...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#8
-
- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 04:25
Tu peux utiliser le xbee ou quelque chose que tu dois connaître un peu plus une télécommande RC, j'avoue que pour tester mon robot j'utiliserai une télécommande Specktrum DX6i dès que la mécanique sera terminée avant de passer au WIFI.
La télécommande RC, à mon avis, simplifie le travail puisque tu n'as qu'à programmer du côté robot, pas du côté télécommande.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#9
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 juin 2018 - 05:55
Pour débuter tu peu te faire l'équivalent d'un rocbot, piloté en bluetooth ou juste avec une radiocommande ... ( J'ai cru comprendre que tu étais dans les modélisme tu dois donc avoir des télécommandes en stock ... )
Si tu as pas de quoi t'imprimer des pièces en 3D on peut te les imprimer avec un service d'impression 3D 
Mais le rocbot c'est juste un robot piloté par deux servomoteurs à 360° donc après tu peux partir de ton propre design, tu peux le faire en bois, en carton, ou en lego, ce sont des matériaux très bien pour commencer ! =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 10 juin 2018 - 06:00
Ce n'est pas pour faire de la lèche à Oracid, mais suivant ce que tu veux faire les Lego peuvent peut-être t'aider.
Au moins à démarrer et avoir des éléments fonctionnels et modulables rapidement.
#11
-
- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 07:02
Tu profite qu'il est en vacances pour prendre sa place ! 
- Forthman aime ceci
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#12
-
- Membres
- 11 messages
Nouveau membre
- Gender:Male
- Location:Languedoc Roussillon France
Posté 10 juin 2018 - 07:59
après quelque recherche je pense partir sur une arduino uno
structure ou exosquelette en aluminium du bras et du chassis
pour contrôlé en mode manuel un récepteur de voiture rc devrais faire l'affaire ou celui d'un de mes drones
pour le châssis :
je pense prendre un châssis prêt a être monter d'une longueur de 27.5 cm d'une largeur de 19.5 cm et d'un hauteur de 9 cm
pour les moteur :
brushed ou brushless ??
cet la question que je me pose en sachant que je veux quand même que le robot et un bon couple pour pas être bloquer par exemple dans de d'herbe
pour la camera fpv :
j'en ai deja une qui fera la faire pour commencer
le servos pour contrôler la camera un petit servo pas trés puissant devrais faire la faire
les servos pour le bras : je suppose qu'il faut des servos avec quand meme pas mal de force ?
par exemple pour qu'il puisse soulevé une canette de soda 33cl
les capteur ultrasonique je chercherai plus tard
les étapes a suivre ? que me conseillé vous par ou commencé par quoi commencé
suis-je sur bonne voit ou es que j'ai zapper des étapes
comme dit dans ma présentation je suis novice dans la robotique
Modération :
Message déplacé par levend.

#14
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 juin 2018 - 08:35
Sur la boutique on propose ce modèle de char à chenille :
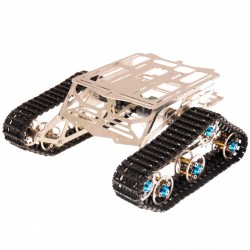
L'avantage de ce modèle c'est qu'il est équipé de moteurs avec encodeurs =) C'est bien pour les robots autonome!
Il y a plusieurs tutoriels qui vont avec disponible sur la fiche du produit et c'est la base que j'utilise pour mon projet de robot d'inspection
Après si tu veux de l'inspiration il y a aussi ROBIL
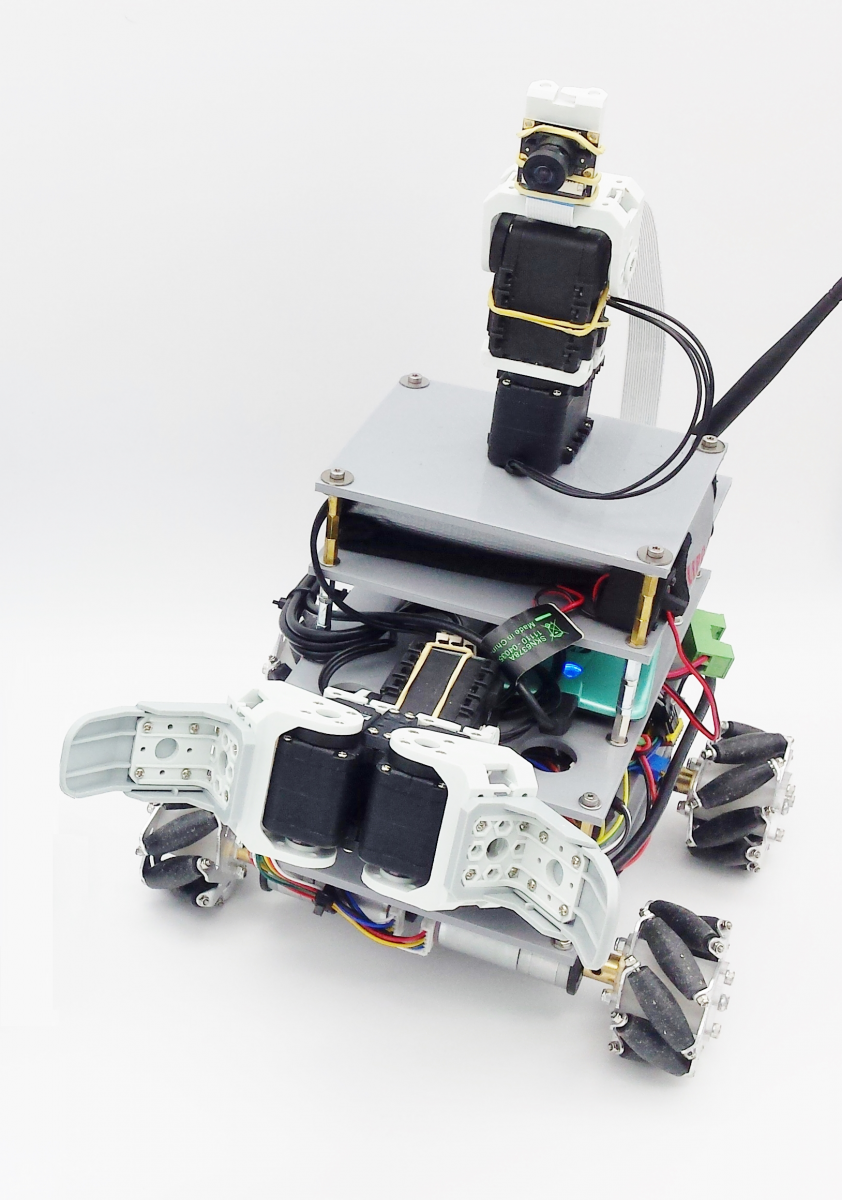
Il n'est pas à chenille mais il a une pince vu que comme tu l'as indiqué cela semble t'intéresser ...
Pour servir de pince ou de tourelles les servomoteurs MG995 sont très bien! =)

ce sont ceux que j'utilise sur BRIEL

Après indépendamment de où tu achèteras ton matériel les tutoriels et aides présentes sur ce site sont suffisamment généraux pour t'aider. ( Par contre acheter sur la boutique permet de soutenir le support technique apporté, les tutoriels etc ... )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#15
-
- Membres
- 11 messages
Nouveau membre
- Gender:Male
- Location:Languedoc Roussillon France
Posté 11 juin 2018 - 10:46
Les encodeurs serve à avoir une trajectoire plus précise car il donne à temps réel ou presque les donné de vitesse du moteur donc sur deux moteur si il y en a un qui tourne plus vite ça rectifie:
( en baissant la vitesse du moteur qui va plus vite ou en augmentant la vitesse du moteur qui va moins vite )?
Les moteur avec encodeur peuvent t'il allez vite au c'est du moteur lent ?
Niveau résistance dans le temps ?
Quel type d'encodeur prendre ?
Incrémental ou absolue ?
#16
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 juin 2018 - 08:04
Bonjour petite question si je prend des moteur avec encodeur il me faut le pilote c'est bien ça ? C'est ce qui remplace les controleurs variateurs si je prenais des moteur normaux ?
Les encodeurs serve à avoir une trajectoire plus précise car il donne à temps réel ou presque les donné de vitesse du moteur donc sur deux moteur si il y en a un qui tourne plus vite ça rectifie:
( en baissant la vitesse du moteur qui va plus vite ou en augmentant la vitesse du moteur qui va moins vite )?
Les moteur avec encodeur peuvent t'il allez vite au c'est du moteur lent ?
Niveau résistance dans le temps ?
Quel type d'encodeur prendre ?
Incrémental ou absolue ?
Les encodeurs sont des capteurs qui peuvent mesurer à quelle vitesse tourne le moteur ...
Il te faudra toujours le driver qui lui va recevoir des consignes et donner la puissance équivalente au moteur.
L'encodeur permet donc de savoir si un moteur va plus vite ou moins vite mais c'est à toi de faire le programme de correction =)
Oui un moteur à encodeur peut aller vite =) Les encodeurs sans contacts ( magnétique / optique) ne s'usent pas dans le temps ... ( éviter la poussière sur les encodeurs optiques mais en générale ils sont bien enfermé )
Si tu veux faire de l'asservissement en position absolue, un encodeur absolue c'est cool !
Sinon pour un asservissement en vitesse encodeur incrémental =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#17
-
- Membres
- 11 messages
Nouveau membre
- Gender:Male
- Location:Languedoc Roussillon France
Posté 11 juin 2018 - 08:46
Pour le bras .
À moins qu'il y et des module pour tout mettre sur la Uno je vois pas comment faire
#19
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 juin 2018 - 08:53
Si je ne dis pas de bétises, il te faudra un driver pour tes 2 moteurs, et un driver pour les 5 servomoteurs, genre le PCA9865 pour les servomoteurs est suffisant pour ça.
Et ta uno pilote tous ça.
Par exemple mon Arduino Mega pilote un driver de chez Pololu pour 24 servomoteurs et tu alimentes bien entendu tes servomoteurs en dehors de ta carte Arduino.
Oh que oui tu vas t'amuser à coder tout ça, c'est tellement sympa, perso je m'éclate même si je bloque sur certains problèmes par moment pendant plusieurs jours.
#20
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 juin 2018 - 09:58
Vu ce que tu veux mettre c'est un peu juste mais ça passe sur une uno =)
supposons que tu ais des moteurs cc avec encodeur en quadrature :
// Définitions des connexions sur la carte uno :
// Commande du moteur droit
#define PINENCODEURDROITA 2 // Interruption 0, port D
#define PINENCODEURDROITB 4 // Port D
#define PINMOTEURDROITA 5 // contrôle vitesse moteur 1; PWM
#define PINMOTEURDROITB 8 // controle direction moteur 1
// Commande du moteur gauche
#define PINENCODEURGAUCHEA 3 // Interruption 1, port D
#define PINENCODEURGAUCHEB 7 // Port D
#define PINMOTEURGAUCHEA 6 // contrôle vitesse moteur 2; PWM
#define PINMOTEURGAUCHEB 9 // controle direction moteur 2
// RC
#define PINCHANNEL0 A0 // Voie de déplacement gauche droite
#define PINCHANNEL1 A1 // Voie de déplacement avant arrière
#define PINCHANNEL2 A2 // Voie RC bonus 1
#define PINCHANNEL3 A3 // Voie RC bonus 2
il te reste 8 pins
#define PINFREE0 10
#define PINFREE1 11 // SPI
#define PINFREE2 12 // SPI
#define PINFREE3 13 // SPI
#define PINFREE4 A4 // I2C
#define PINFREE5 A5 // I2C
#define PINFREE6 0 // UART
#define PINFREE7 1 // UART
Avec l'i2c tu peux piloter tes servomoteur grâce au driver pour servomoteurs en plus utiliser un tel driver ça te simplifiera les problèmes de code ...
Et il te faut 2 pins pour le capteur à utltrason
en fait tu pourrais donc tout mettre sans utiliser de driver si tu veux ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Présentation du projet, Robot à chenilles
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
Mon robot d'exploration - Explora 85 - à l'abandonDébuté par levend, 08 avril 2012 |
|
|
1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

