J'étais optimiste et insouciant à l'idée d'utiliser le multiplexeur de capteurs eV3 de mindsensor , mon objectif étant de mettre 6 capteurs sur mon robot.
Quelle déception ! Alors que les capteurs lego sont très fiables, ils deviennent quasiment inutilisables quand on les branche sur ce multiplexeur. En fait , très souvent, une erreur est transmise et on est obligé de la gérer, ce qui rend impossible certaines fonctions comme une détection à la volée d'une ligne ou d'un objet.
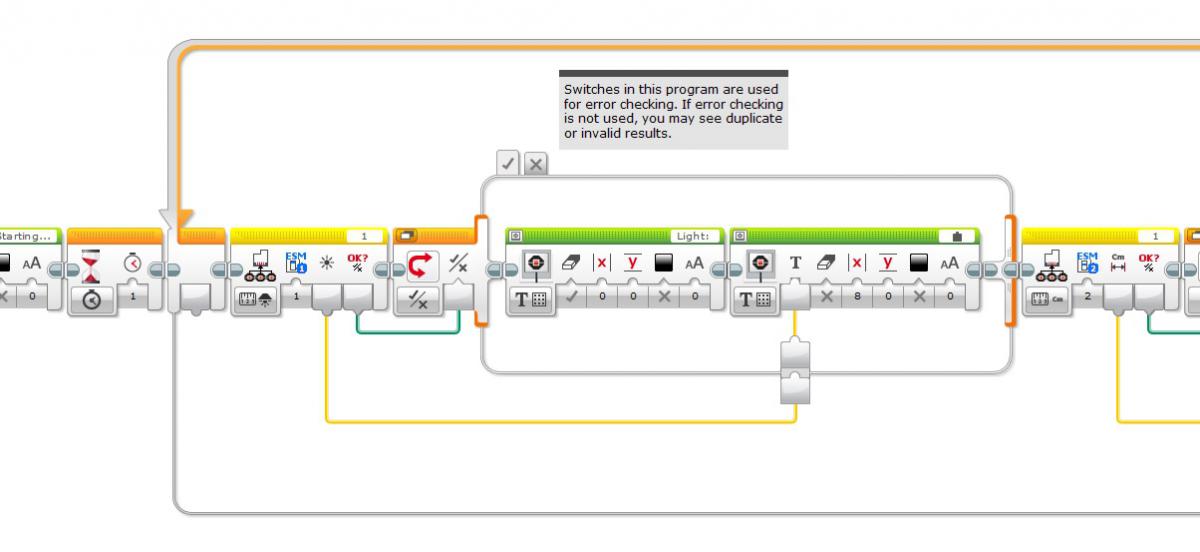
Et quand on regarde les programmes fournis, on s'aperçoit qu'ils incluent une boucle pour gérer ces erreurs. C'est prévu par le constructeur , sauf que cette gestion rend quasiment inutilisables ces capteurs !
J'ai fait un petit programme qui lit 1000 fois le capteur et le résultat est sidérant: pour le capteur de couleur 80% d'erreur, pour le détecteur IR 10% !!!
Je me suis fait avoir avec un capteur de couleur qui fait office de fin de course. Auparavant, branché directement sur un port de l'EV3, il fonctionnait parfaitement. Quand je l'ai branché sur le multiplexeur une erreur a eu lieu au mauvais moment (forcément avec 80% d'erreur) , la fin de course n'a pas fait son travail et j'ai explosé mon robot ...
Qui connait ce matériel ? Oracid ? y-a-t'il une solution ?
C'est absurde.