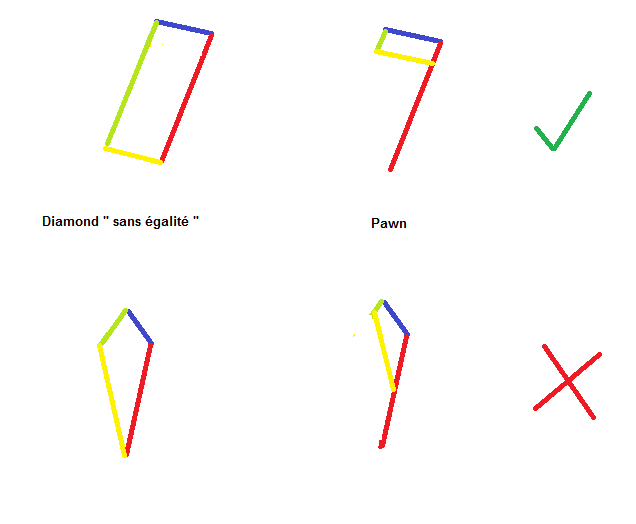
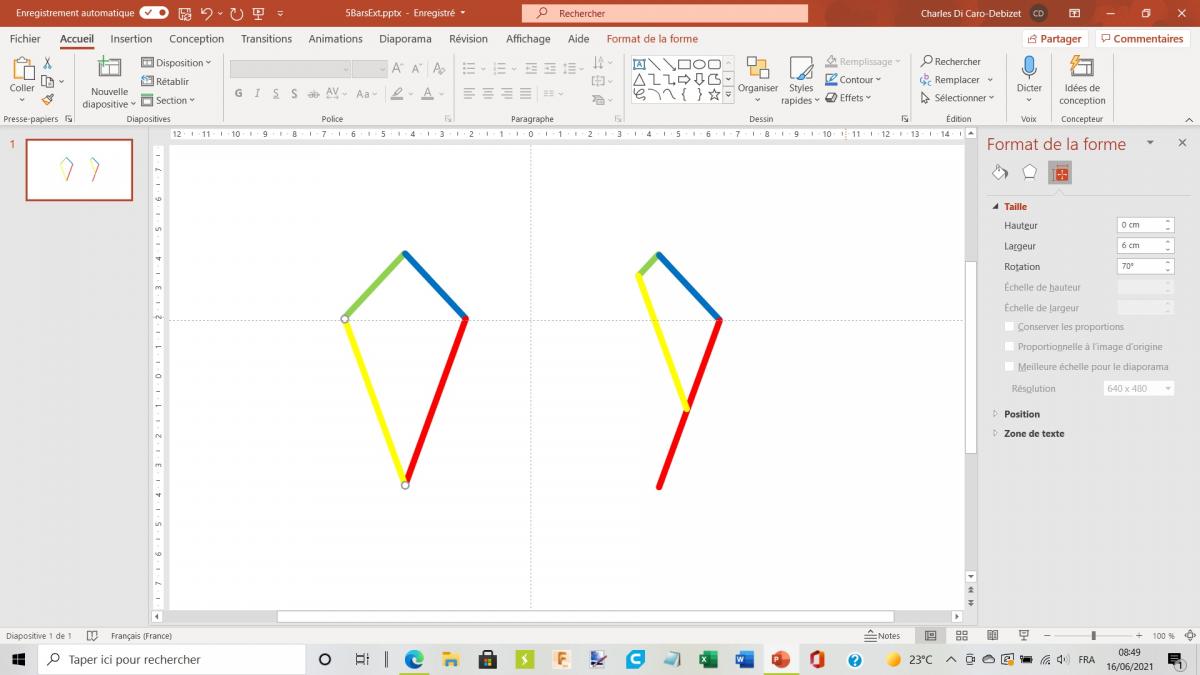
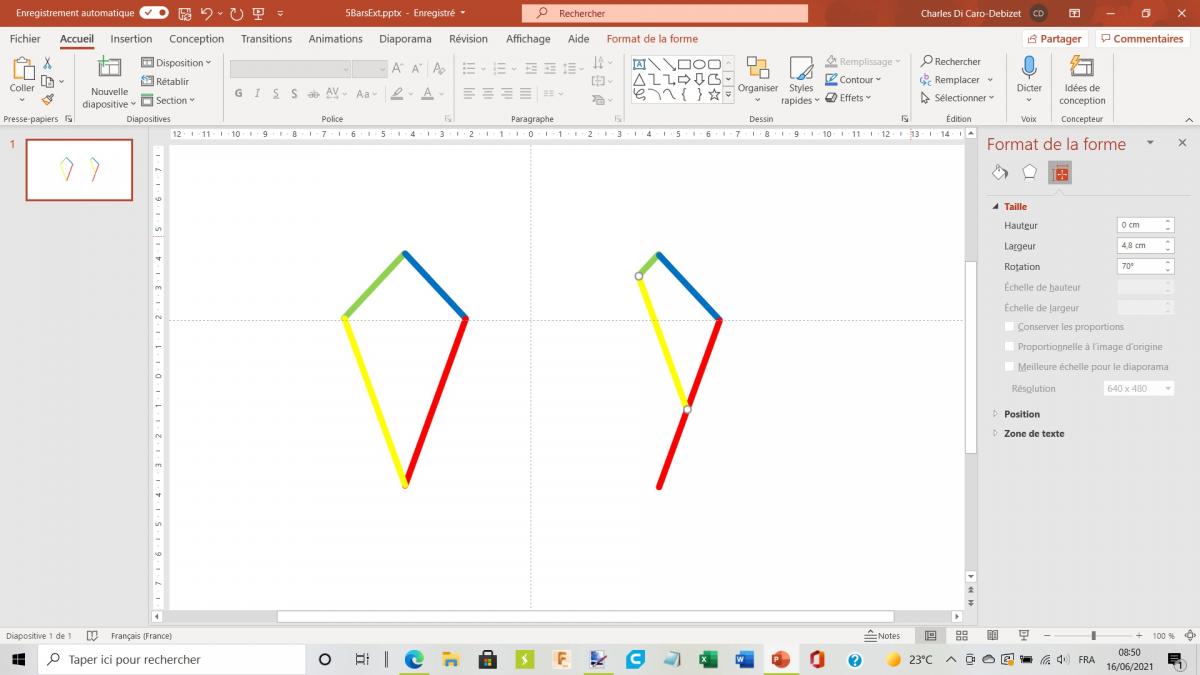
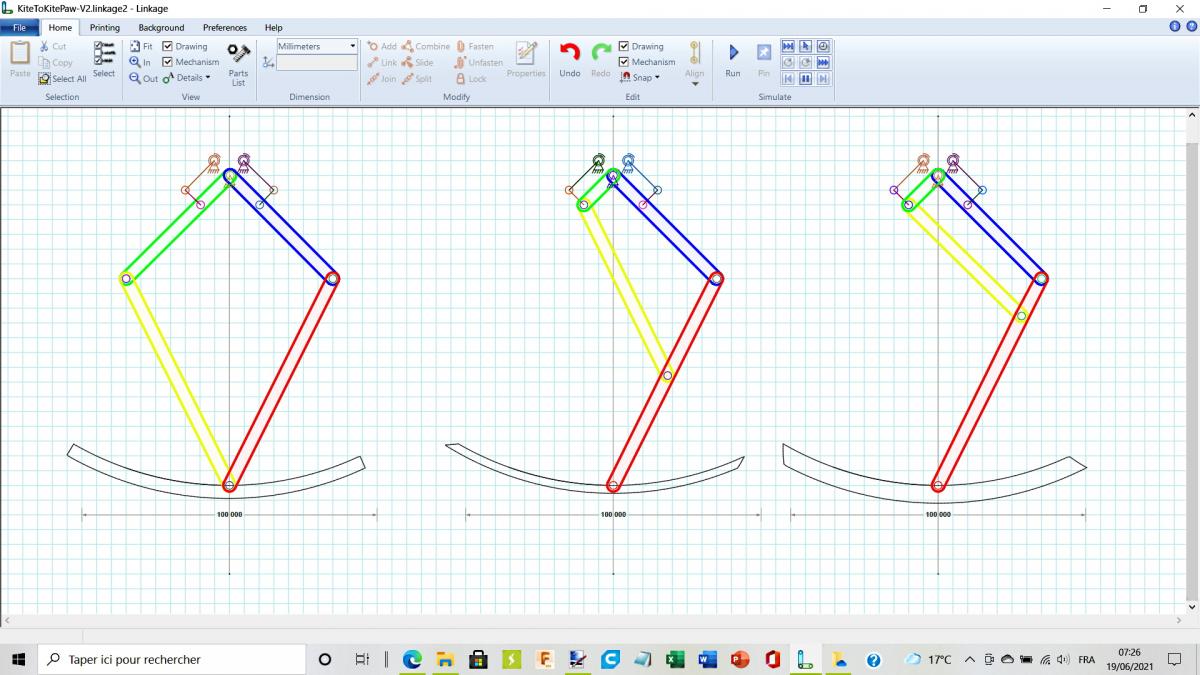
J'ai fait cette vidéo pour montrer l'équivalence entre un mécanisme 5 barres classique en passant par le mécanisme à losange (Diamond, en anglais) pour finir par le mécanisme de la patte (Paw, en anglais).
Je n'ai pas la capacité de démontrer que les forces mécaniques de ces 3 mécanismes sont identiques, mais j'en prends le pari, d'autant que mes tests confirment bien leur équivalence.
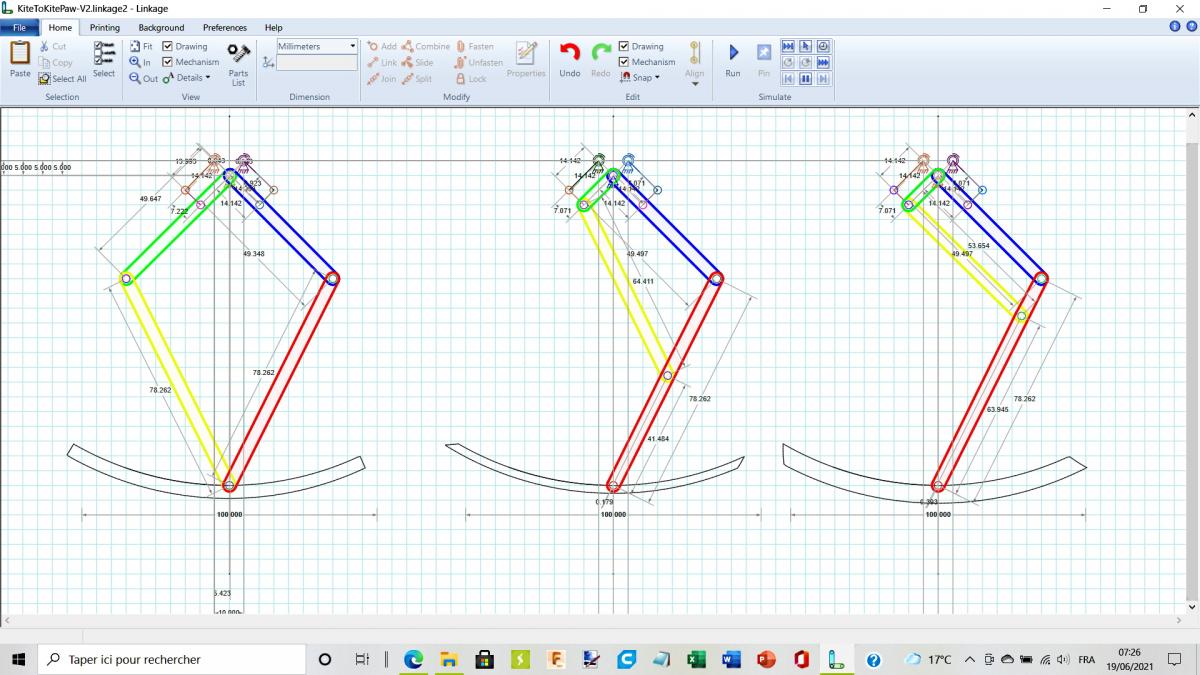
A première vue, le servo de droite a un palonnier beaucoup plus long que le servo de gauche. Mais je pense que la figure est trompeuse. Ce n'est pas intuitif, mais je pense que le parallélogramme transfert le couple de la partie manquante du palonnier gauche vers la partie en porte à faux de la patte.
Pour différencier les 2 derniers mécanismes du 5 Bar, je les ai appelé Diamond et Paw.
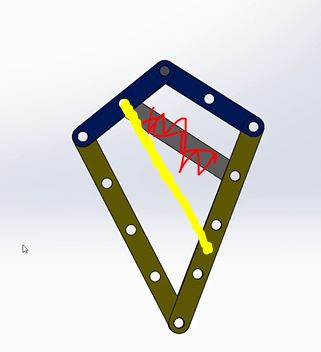
Ce mécanisme Paw est très souvent utilisé dans les quadrupèdes et maintenant les bipèdes, mais sans beaucoup d'explication.
Ci-dessous, un exemple d'étude de ce mécanisme.