

Bonjour,
Voilà c'est partis je me lance dans la construction de mon premier robot, ce robot:
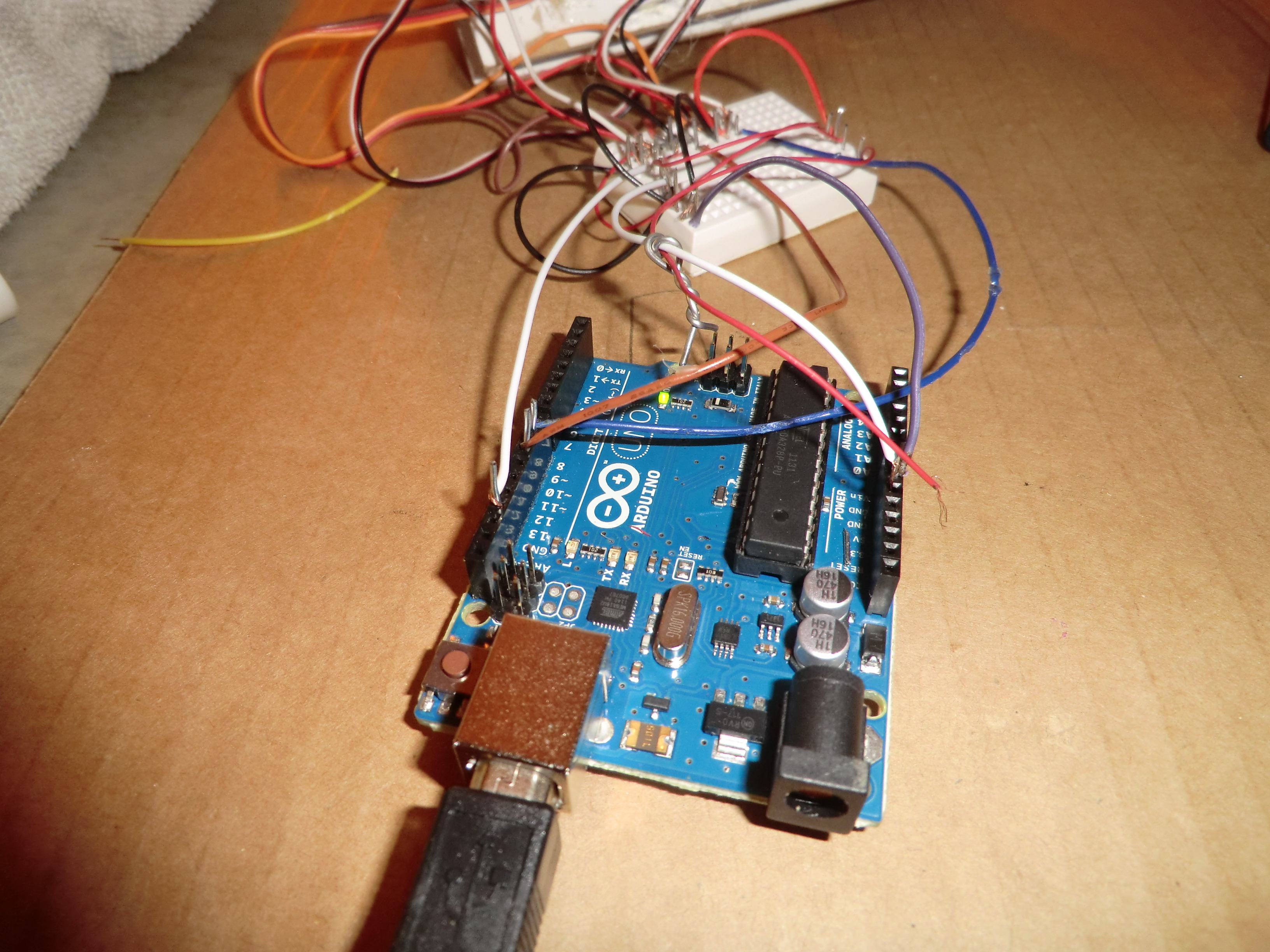
-est piloté avec une carte arduino UNO.
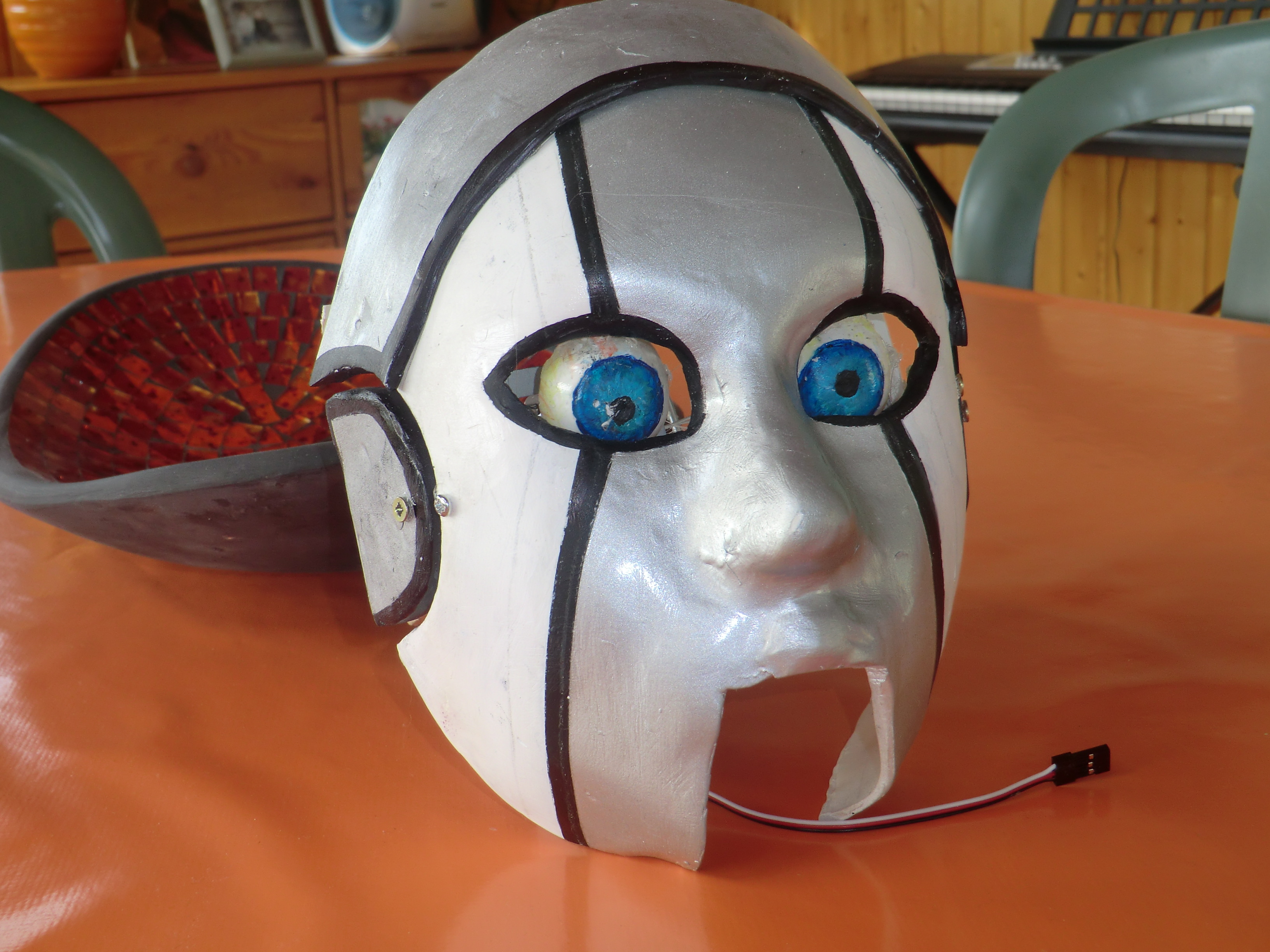
il a une tête "humanoid".
il peut bouger les yeux de droite à gauche, et de haut en bas!
-ouvir la bouche et tourner la tête
il pourra bientôt parler graçe au kit Wave Shield et répondre à des questions graçe à une platine Shield de reconnaissance vocale.
Il n'est pas encore fini et je posterai ici tout les problèmes que je rencontre durant toute la construction et la programmation.
Voici quelque photo:
Voilà!


























{kind=link}