

Bonjour à tous,
Pour ce premier post, je vais vous présenter notre projet pour la coupe de France de robotique 2019 avec mon équipe des Karibous. Alors, si vous ne connaissez pas la coupe ou notre équipe voici quelques liens :
- Vidéo de présentation de la coupe
Comme l'année et le projet a déjà bien avancé, je vais rapidement faire un état des lieux, et je posterais des News régulièrement. Et pour que ce soit plus simple de partager des photos et des vidéos, j'ai créé un album avec l'avancée du robot. Vous pouvez retrouver ça sur le lien suivant :
Album Karibous 2019 - Blog Robot-Maker
Concept :
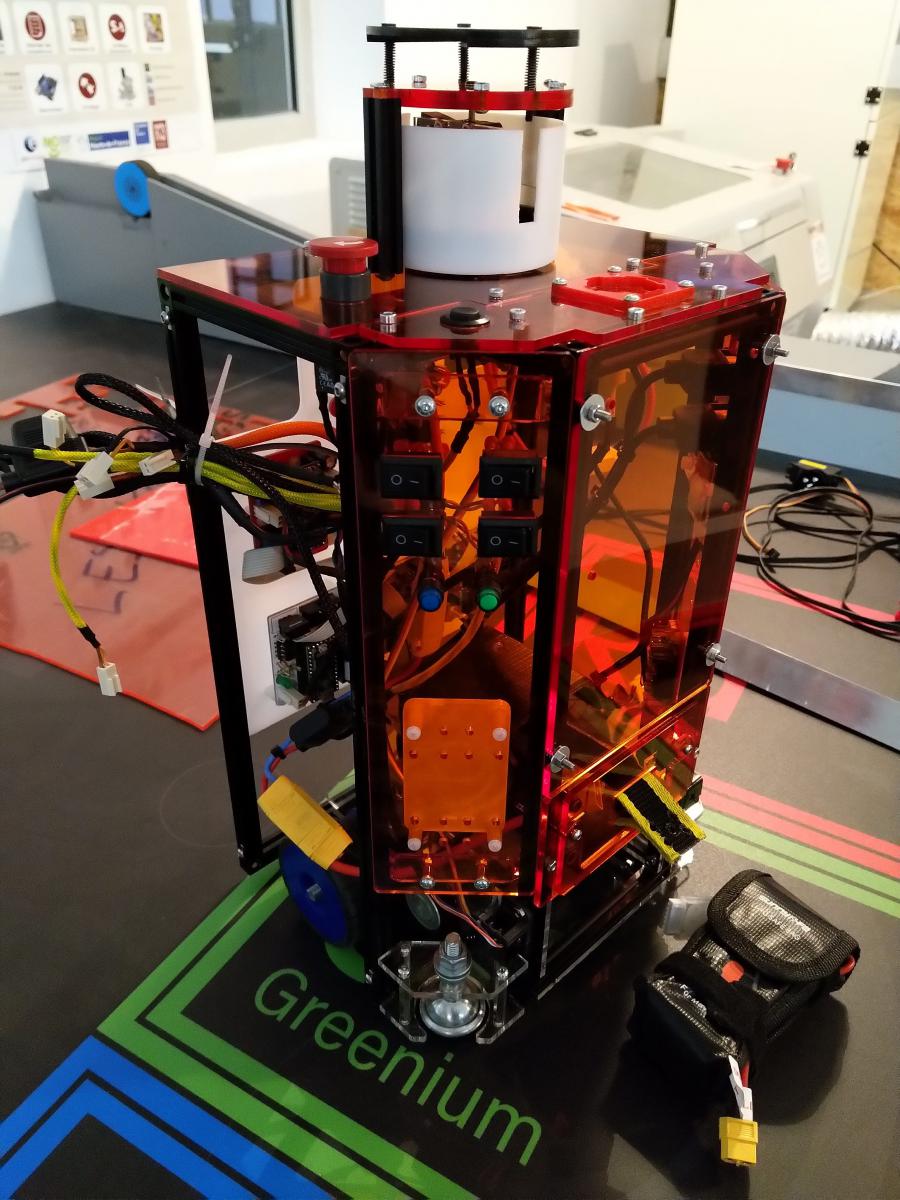
Pour cette participation en 2019, nous allons réaliser pour la première fois deux robots pour la compétition. Mais comme on a pas beaucoup de temps, on a décidé de faire deux robot exactement pareils du point de vue de la base roulante, de l'archi-electronique et de la détection de l'adversaire. Seule la couche actionneur changera.
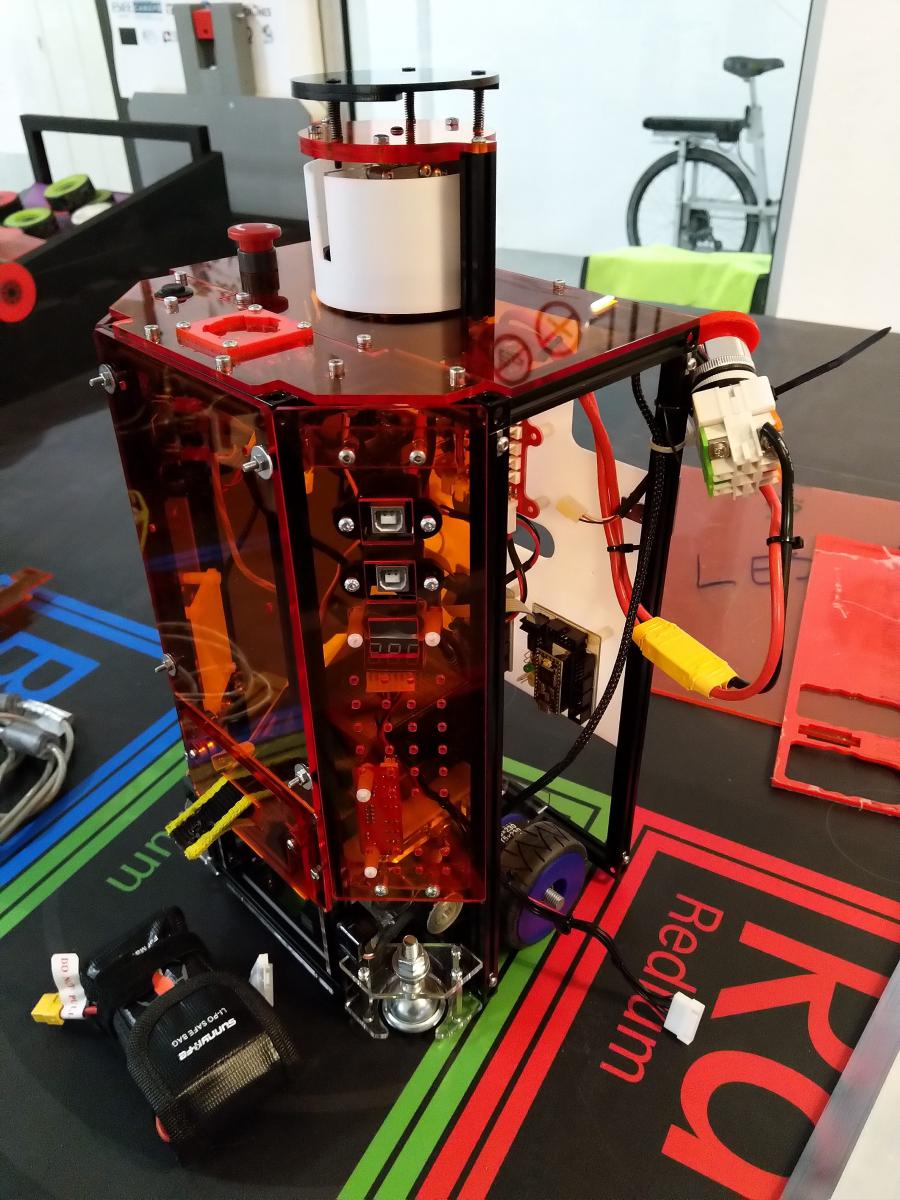
Eléments techniques :
- Structure en MakerBeam et en PMMA découpé au laser
- Motorisation par moteur pas-à-pas Nema 23
- Roue imprimée en 3D et pneumatique de voiture RC
- Entrainement par poulie/courroie
- Batterie 22V LiPo
- Deux uC reliés en I2C pour l'intelligence :
- Teensy 3.5 pour la stratégie et les actionneurs
- Teensy 3.2 pour le déplacement et l'évitement
- Ecran graphique monochrome SPI 128x64
- Manipulation des éléments par ventouse
- Actionneurs par servomoteurs de modélisme
- Tirette de démarrage magnétique
Avancée du projet :
- Structure globale terminée
- Carterisation arrière terminée
- Cartes elec conçu en attente de fabrication
- Bloc motorisation validé et premiers déplacements
- Bloc détection adversaire testé mais pas encore validé
- Tirette testée. Modification à apporter sur l'aimant
- Code en cours de réécriture ( voir github : https://github.com/n...q/Karibous-2019 )
Et voila ! Je posterais des avancées au fur et à mesure 





 Sinon, on avait pensé au début à un système directement intégré dans l'electron avec un moteur et la courroie. On va voir ça ...
Sinon, on avait pensé au début à un système directement intégré dans l'electron avec un moteur et la courroie. On va voir ça ... 

 Par contre ça nous a obligé de passer à des tensions moteurs plus importantes. C'est pour ça qu'on utilise des batteries LiPo 6S maintenant ( 22,2V ) et ce qui nous permet d'atteindre des vitesses plus importantes sans décrochage. Pour du nema 17, on était resté à du 12V.
Par contre ça nous a obligé de passer à des tensions moteurs plus importantes. C'est pour ça qu'on utilise des batteries LiPo 6S maintenant ( 22,2V ) et ce qui nous permet d'atteindre des vitesses plus importantes sans décrochage. Pour du nema 17, on était resté à du 12V. 











