J'ouvre un sujet dédié à un de mes projets évoqué dans un autre fil , un solveur de labyrinthe en Lego. Comme d'habitude mon objectif modeste est de découvrir un nouvel univers. Lego présente de gros avantages mais aussi des contraintes qui rendent les projets intéressants, que j'aime partager ici.
Je ne vais pas forcément aller chercher sur le web des algorithmes existants mais essayer de faire mon propre apprentissage.
Je suis donc parti sur les préconisations de Mike118 , concernant le dimensionnement du projet. Le labyrinthe aura 100 cases de 18 cm x 18 cm et le robot une dimension de 16cm x 16cm.
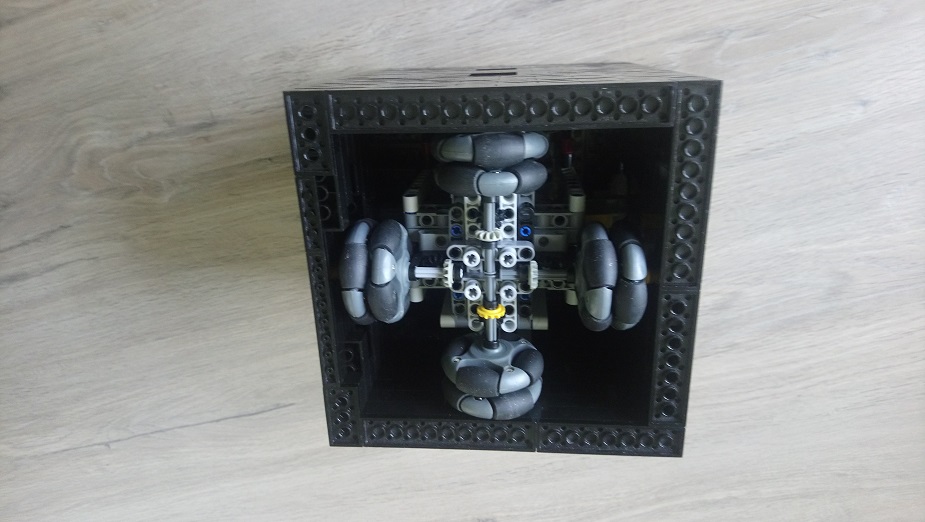
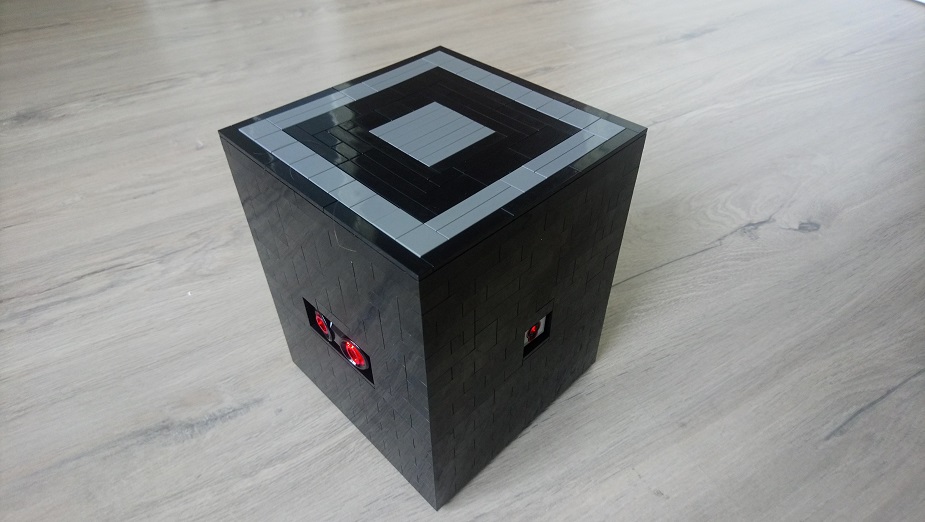
C'est mon premier défi et je touche du doigt les inconvénients du Lego, l'encombrement de ses moteurs et de son cerveau... Au bout de 2 semaines d'essai, entre roue folle, roue mecanum et omniwheels, je suis enfin arrivé à un résultat correct, qui respecte cette contrainte. De plus je m'en suis fixé une totalement arbitraire c'est de sortir de l'apparence Lego et de faire un beau robot, je suis content du résultat, pas évident non plus en Lego: Je vous présente THESEE³ :
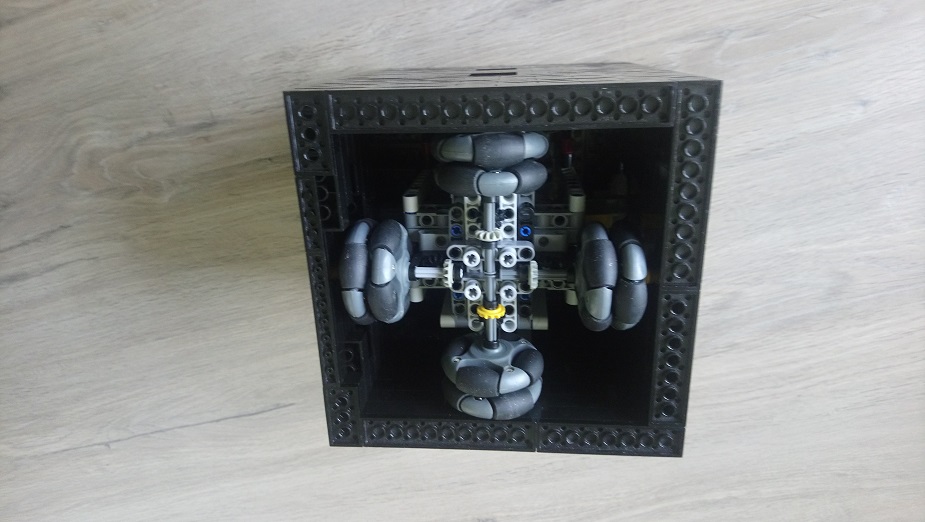
A noter que j'ai été obligé de tricher pour parvenir à loger tout ce beau monde dans ce cube, que les puristes me pardonnent, mais les pièces chinoises percées sur toutes les faces m'ont permis de mettre 4 servomoteurs pour piloter les omniwheels qui me permettront de faire des déplacement perpendiculaires dans le labyrinthe:
La première partie est réalisée, la deuxième sera la réalisation du labyrinthe de 4m². J'ai pris en compte les conseils avisés se Mike118 et d'Oracid mais je ne sais pas encore comment je vais faire. Tout cela n'étant que préparatifs à la phase primordiale que j'imagine complexe de la résolution du labyrinthe et son optimisation.
Enfin je n'ai pas résisté à la tentation de faire un teaser spécialement pour Robot Maker !