


Notice de la base roulante 4WD du robot Minus
Présenté par : Vigibot & Robot Maker
En cours de rédaction
Table des matières
1 : Matériel nécessaire
2 : Etapes de montage
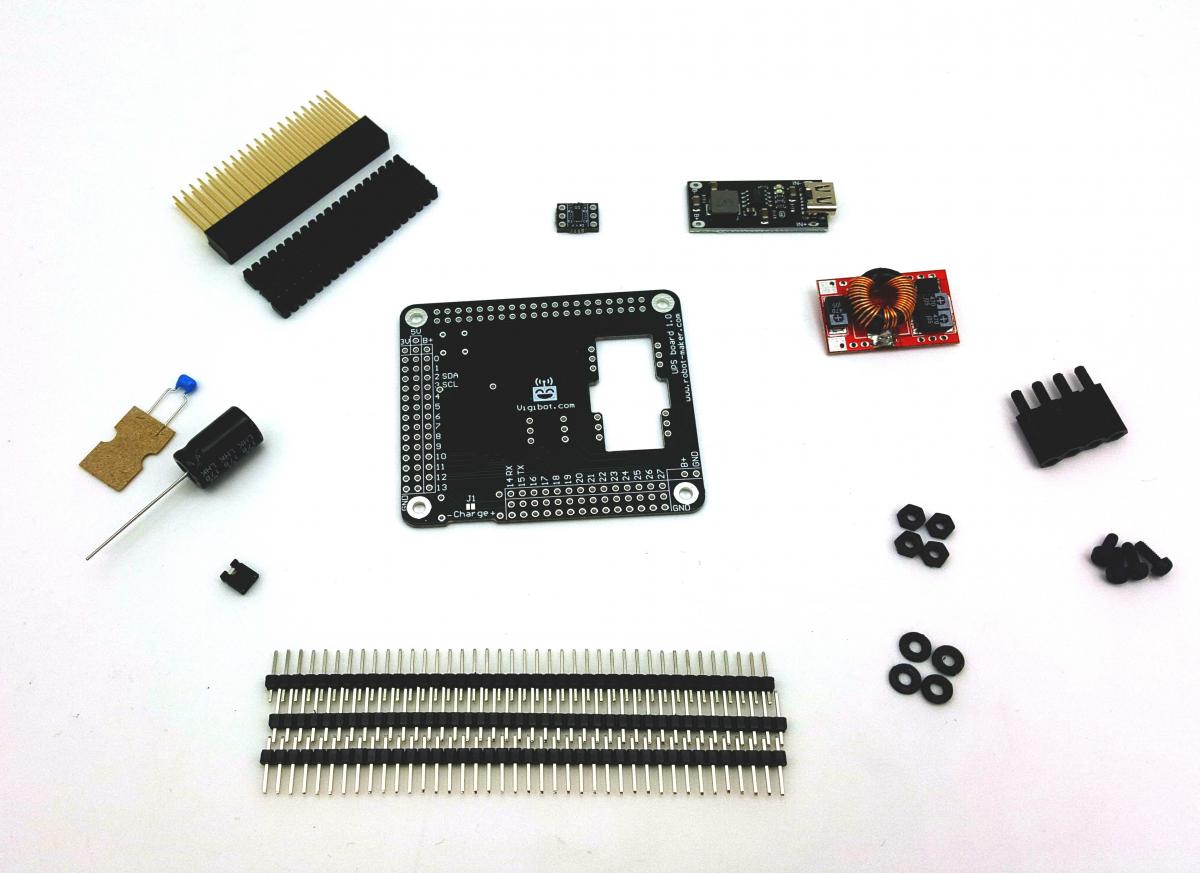
1 : Matériel nécessaire
PCB UPS HAT * 1
Carte driver de moteur feetech * 1
Moteurs Pololu * 4
Câbles pour moteurs * 4
Supports moteurs Pololu long * 4
Kit chassis * 1
Contenu du kit châssis :
- Pièce imprimées en 3D : 4
- Entretoise M2.5 mâle 25mm : 4
- Entretoise M2.5 mâle 12mm : 4
- Entretoise M2.5 male 5mm : 4
- Entretoise M2.5 femelle 10mm : 4
- Vis M2.5 nylon noir longueur 8 à 10mm : 2
- Vis M2.5 nylon noir longueur 6mm : 10
- Ecrous M2.5 nylon noir : 6
- Vis M2 longueur 8mm : 3
- Ecrous M2 : 3
2 : Etapes de montage
Disclamer : Il n'existe pas une seule et unique façon de monter votre robot... Ces étapes ne sont qu'une proposition de montage, mais des variantes sont possible.
- Souder le matériel si il n'est pas déjà soudé
a ) Si vous avez un UPS en kit, qui n'est pas soudé : Souder l'UPS.
Voir tutoriel sur comment assembler l'UPS
Kit UPS non assemblé :
UPS une fois assemblé :
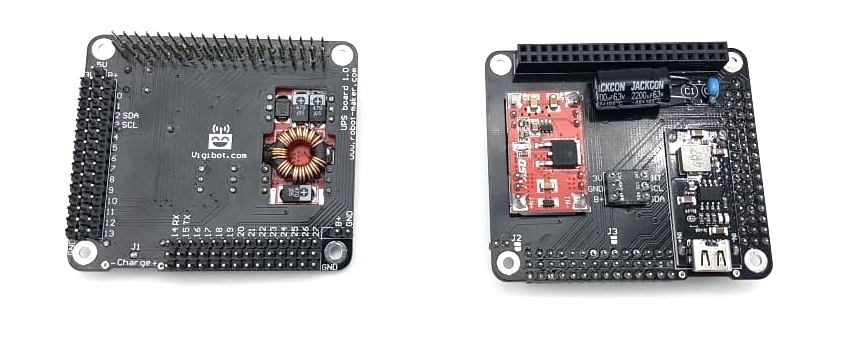
(gardez bien la visserie nylon elle vous sera utile pour assembler la suite )
b ) Soudez les câbles sur vos moteurs
Il y a un + indiqué sur les moteurs, soudez le fil rouge sur la broche désigné avec le + .( Ce n'est pas indispensable de respecter cette convention, mais si vous le faîtes ça sera plus simple pour vous pour la suite ...)
- Installer votre carte SD et connectez votre raspberry pi
Suivre les instructions sur comment ajouter son robot sur vigibot.
Le fait de commencer par installer votre raspberry pi vous permettra de faire des essais au fur et à mesure.
Notamment de vérifier si vont moteurs sont bien câblés avant de finaliser tout votre assemblage.
- Assembler les moteurs, la carte moteur sur le plaque châssis
a ) Pour assembler les moteurs utiliser les 2 vis et et écrous fournit avec les supports moteurs
b ) Pour assembler la carte moteur utiliser 2 vis M2.5 longueur 8 ou 10mm et 4 ecrous. La carte moteur doit être montée du même côté que les moteurs
Note : avant de fixer la carte moteur repérez les indications M1 et M2 et + et - qui sont présent sur la carte !
c ) Monter les roues
Vous pouvez regarder cette notice de montage proposée par yannovsky en parallèle avec des photo.
- Brancher les moteurs sur la carte moteur,
Il faut brancher les deux moteurs gauche sur M1 et les deux moteurs droite sur le bloc M2.
En branchant le fil rouge sur le +.
Faire passer les câbles sortant du drivers de moteurs par les trous oblong.
Les deux fils Blanc sont les fils permettant d'envoyer les signaux utilisés pour piloter vos moteurs.
Le fil blanc contrôlant les moteurs de gauche doit être connecté sur le pin 26 l'autre sur le pin 27.
Les fils rouge et noir sortant de votre carte moteur permettent d'alimenter vos moteurs. Il faut y brancher une source d'alimentation entre 3V et 6V. Vous pouvez relier au B+ GND fournis fournis par votre batterie 1S.
Il vaut mieux tester dès à présent le sens de déplacement de votre robot avant de passer à l'étape suivante.
- Finaliser la partie inférieur du châssis
Partie la plus délicate : Courber les fils de moteurs de sorte à ce qu'il ne dépassent pas du châssis.
Et fermez le dessous du robot. Il vous faudra 8 vis M2.5 longueur 6mm 4 entretoises femelles longueur 10mm.
- Fixez les accessoires inférieurs
Le parchoc fournit se fixe à l'arrière de votre robot avec 3 vis M2 longueur 8mm et 3 écrous
(Si vous avez un kit pince c'est le moment de fixer la pince à l'avant elle aussi avec 3 vis M2 longueur 8mm et 3 écrous fournis avec le kit pince)
- Ajout de l'UPS
Vérifiez la façon dont vous souhaitez monter la raspberry pi : Généralement on la monte à l'avant du robot , les USB vers l'arrière du robot, et fixez les entretoises longueur 25mm dans les 4 trous retenu pour monter la raspberry pi.
=> Deux trous sont libres: insérez la partie mâle des entretoises et ajoutez un écrou de l'autre côté.
=> Deux trous sont occupés par une vis : retirez la vis et vissez la partie mâle de votre entretoise à la place.
Vous pouvez maintenant pose l'UPS sur ces 4 entretoises avec les entretoises 12mm avec une rondelle .
Vérifiez bien le sens dans lequel vous mettez l'UPS avant de visser les entretoises
- Montage de la raspberry pi et du toit du robot.
Avec 4 entretoises 5mm et 4 vis M2 longueur 6 , fixez votre raspberry pi à votre UPS et refermez le toi.
3 : Quelques photos
https://github.com/v.../Minus assembly










![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





