

UPDATE 2022.08.22: i didn't do a good job checking if the servos fit into the vigibot 3D files. unfortunately no metal gear 180° fit the vigibot 3D files. Doman DM-S0090MD 270° is the only metal gear servo that fits. Bokins plans on modifying the 3D files to make the DIYMore MG90S fit.
servo benchmark
goal: find robust servo models for a Minus-Type robot, in the hopes of extending time between servo failures and repairs. A per piece price of up to 20$ may be acceptable (N20 Pololu motors are also in that range). Minus-Type uses Micro Servos, also called 9g or sg90.
tested are the following servo models:
1) DIYMore SG90, plastic gear, 1$: recommended by Vigibot. are very quick which makes for a comically fast head nodding that people find hilarious. used on most of my robots (not WalterJakob's pan-tilt), personal failure rate is pretty high. EDIT: a resonating shaking may happen if the weight is too far from the axis line (used as pan servo on PepitoBots). i assume a drawback of the PID(?) regulator in use, which is probably also responsible for the desired comically fast nodding. same applies to DIYMore MG90S metal gear servo (used as pan servo on Briecam).
2) DIYMore MG90S, metal gear, 3$: had servos in the past that were DOA or didn't work on the lower battery voltage, unfortunately can't remember the exact reason. EDIT: read above servo #1 notes. EDIT: servo doesn't fit the current 3D printer files, requires adjustment.
3) TiankongRC TS90A, plastic gear, 270°, 3$
4) Doooman Hobby DM-S0090MD, metal gear, 270°, 6$
5) DFRobot DS-S006L, plastic gear, 9$: has a clutch to protect internal gears.
6) FiTec FS90MG, metal gear, 6$
7) Spektrum A330, plastic gear, 18$
8) Futaba S3114, plastic gear, 20$: "sub-micro" servo doesn't fit the current 3D printer files, requires adjustment.
9) HiTec HS-55+, plastic gear, 20$
10) HiTec HS-5055MG, metal gear, 30$
11) HiTec HS-65MG, metal gear, 30$

↓ See conclusions or table "benchmark table.xlsx" for servo failure times.
test tries to simulate real world usage, common scenarios:
• to work with Vbat voltage 3.3V - 4.2V
• usually low weight/momentum movements (camera is pretty lightweight)
• people may accidentally hit the robot
• robot may drive into walls or objects with a servo absorbing the hit
• servo may want to move into an object and be limited by it
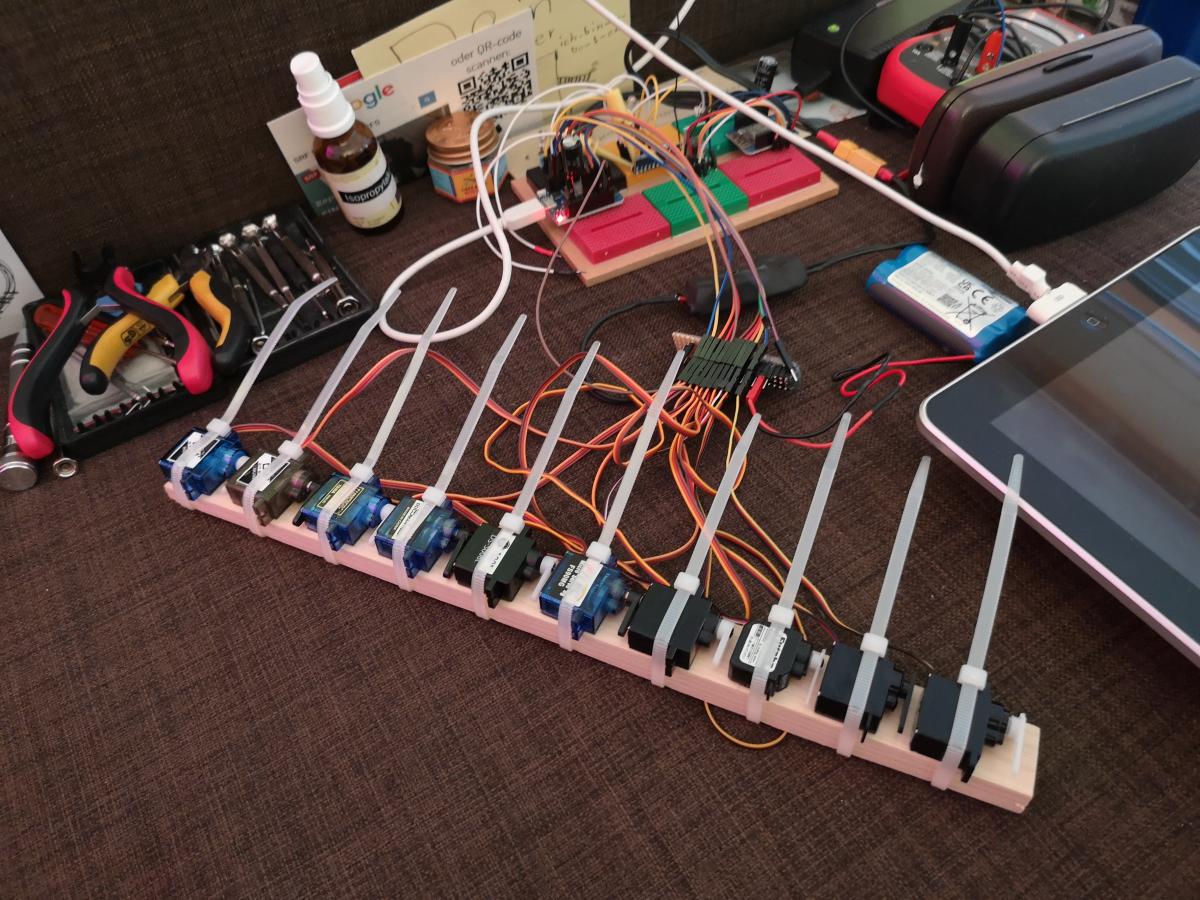
stress test setup:
pre-test #0: power from 3.3V and check if servo is even functional (most servo specifications state a minimum operating voltage of 4V). stop movement with hand, to check if it stops immediately / gets stuck.
main test #1: power from 3.3V, move back and forth (90° - 0°) automatically (eg 1 cycle every 6s to keep temperature low), no weight attached. from time to time force into obstacle (180° position can't be reached) to simulate real world interaction. let run every night and check how many minutes they last before they stop working.
notes:
27.5.22: ran test #1 for 2400min (actual movement: 400min), 1 cycle (to 0° and back to 90°) every 6s, no failures.
-> replaced with 10A 3.3V power supply. increased speed from 1 cycle every 6s to 1 cycle every 2s. now movement from 3 servos overlap. can still be doubled. temperature IR meter: room = 27°C, servo avg = 35°C, servo max = 37°C.
28.5.22: ran test #1 for 480min (actual movement: 240min), 1 cycle every 2s no failures.
-> increased speed to 1 cycle every 1s. movement from 6 servos overlap, maximum possible. temperature IR meter: servo avg = 42°C, servo max = 46°C
29.5.22: ran test #1 for 800min (actual movement: 800min), 1 cycle every 1s,
-> divided runtime value by intensity to "actual movement" value.
 VID_20220606_211516.mp4 13,93 Mo
190 téléchargement(s)
VID_20220606_211516.mp4 13,93 Mo
190 téléchargement(s)
Conclusion for Botkins / Minus-Type Robot:
6 servos had good behavior and more than acceptable runtime until failure.
Metal Gears:
• DIYMore MG90S: Okay. EDIT: .stl doesn't fit!
• FiTec FS90MG: Okay. EDIT: .stl doesn't fit!
• Doooman Hobby DM-S0090MD: Okay (Pan 270°: cable fatigue!)
Plastic Gears:
• DIYMore SG90: Okay
• TiankongRC TS90A: Okay (Pan 270°: cable fatigue!)
not recommend servos:
• DFRobot DS-S006L: Okay EDIT: auto-revert is annoying, drops objects in gripper by itself!
• Spektrum A330: No (failed early)
• Futaba S3114: No (.stl doesn't fit)
• HiTec HS-55+: No (Slow)
• HiTec HS-5055MG: No (3.3V unsupported)
• HiTec HS-65MG: No (Slow)
See table "benchmark table.xlsx" for servo failure times.
benchmark table (1).xlsx 7,24 Ko
153 téléchargement(s)
Modifié par Mike118, 21 mars 2024 - 12:04 .
















