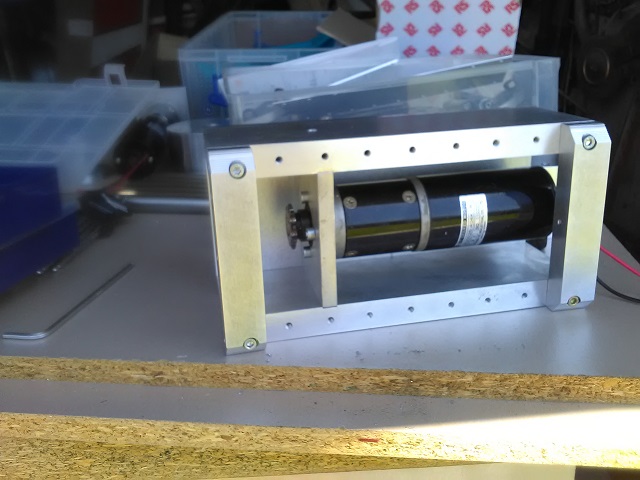
Pour moi les moteur PAP qui pourrait être embarqués sur le robot (max 24V) ne sont pas assez costaud pour maintenir le bras en position..
Pour info, rien n'empêche de mettre un réducteur en sortie de PAP pour gagner en couple (au prix de la vitesse, qui pour toi sera probablement plus élevée que nécessaire de toute façon). Il existe même des PAP avec réduction intégrée (mais je sais pas s'il y en a avec une réduction intégrée permettant d'atteindre le couple que tu souhaites).
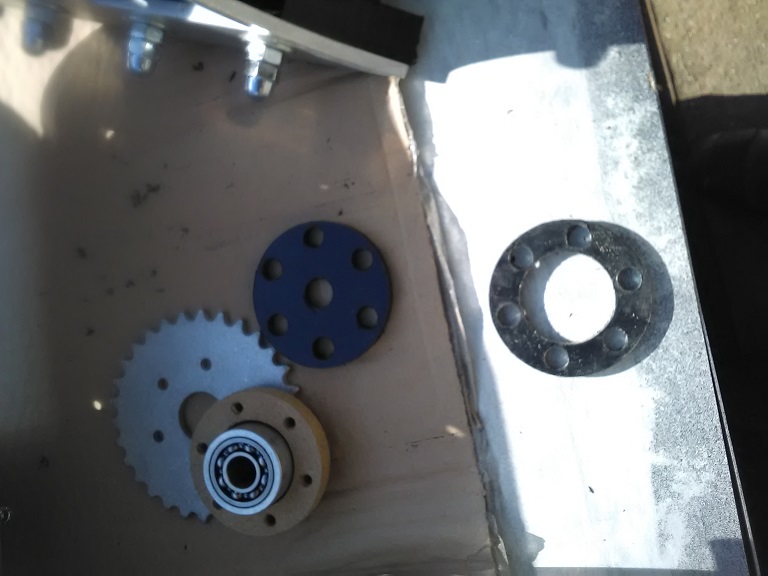
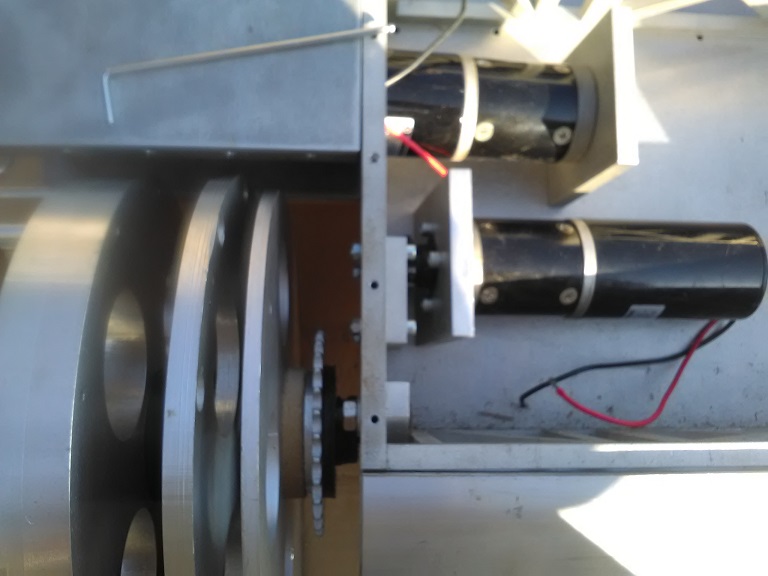
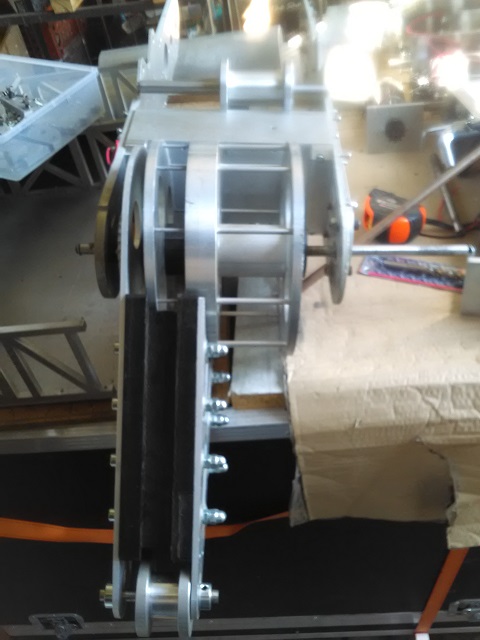
Le potentiomètre ça fait un moment que j'y pense et je n'avais pas trouvé de solution avant d'avoir choisi ce moteur, maintenant je n'ai pas réfléchit si ça allait convenir parce que je classerait plus ça dans la télémétrie (même si ça dépasse la simple télémétrie) donc pas une priorité, l'axe arrière est présent sur le moteur donc si je peux l'exploiter ce sera très bien, sinon ce n'est pas grave s'il ne sert pas. Le bras ne fait pas un tour complet mais en plus du motoréducteur il y a encore une réduction avec l'ensemble pignons/chaine, il faudra que je vois si c'est réalisable. Je pense que la réduction pignons/chaine doit être de 1:3 donc ça va bien me compliquer les choses mais ça ne veut pas dire irréalisable.
Si c'est une "réduction" 1:3 (ie tu augmente la vitesse), alors 10 tours de l'axe arrière correspondent à 3*7.4=22.2°
Si c'est une réduction 3:1 (tu diminue la vitesse), alors 10 tours correspondent à 7.4/3=1.5°
Pour moi ici l'encodeur est inutile puisqu'il ne permet pas de connaitre la position mais juste de savoir s'il tourne.
Faut : l'encodeur te permet de connaître très précisément la position par rapport à une position initiale. Il faut juste un fin de course pour initialiser la position. Ensuite, en comptant soigneusement les fronts montant et descendants sur les deux canaux (en regardant à chaque fois l'état de l'autre canal), tu peux compter très précisément la position.
Par exemple un encodeur bas de gamme, 24 impulsions par tour (donc en fait 24*4=96 signaux par tour car tu as les deux sorties) à 1.90€ : https://www.gotronic...204a9-16983.htm : ça te ferait une précision de 360/96/488= 8*10^-3 degrés en sortie du moteur! Bref, tu sera limité par le jeu dans l'accouplement et dans ton réducteur bien plus que par la précision. Attention, cet encodeur est plutôt prévu comme bouton de réglage, avec une durée de vie de seulement 15 000 cycles
Sinon, pour un peu plus cher, tu as des encodeurs encore beaucoup plus précis, et prévus pour tourner en continu : par exemple à 28€ : https://www.gotronic...n0230-26819.htm avec 400 impulsions/tour (soit 360/(4*400)/488=5*10^-4 degrés, et qui est spécifié pour une vitesse de 5000 rpm, donc qui devrait tenir beaucoup beaucoup plus que les 15000 cycles de l'autre.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.





 , ce sera déjà beau si j'arrive à utiliser les encodeurs pour déterminer la vitesse et le sens de déplacement du robot.
, ce sera déjà beau si j'arrive à utiliser les encodeurs pour déterminer la vitesse et le sens de déplacement du robot.






 .
.




 .
.