Voila, mon probleme est relativement simple...
J'ai réalisé un robot mobile (JAG2) avec des détecteurs ultra-sons, et de l'odometrie.
Je voudrais éviter les obstacles, et aussi faire du suivi de mur en simultané.
J'avais disposé 6 détecteurs : 1 de face, 2 à 45° et 2 en longitudinal, plus 1 vers l'arrière (qui n'est pas très utile)
Le pb vient des détecteurs à 45° : Si je suis très près du mur : ça va à peu près, mais dès que je suis à plus de 20-30 cm, les valeurs sont irrationnelles.
Je me pose la question de savoir si je dois orienter ces détecteurs plus vers l'avant pour voir les obstacles de plus loin ou plus vers les côtés pour connaître plus rapidement l'absence de mur. Je peux aussi en rajouter 2... mais est-ce vraiment utile ?
Par ailleurs, j'ai remarqué sur le BOB3 de Léon que ses ultra-sons étaient disposés verticalement. Est-ce mieux ?
Je n'ai pas encore fait de modifs, car faire de la mécanique qui n'est pas fonctionnelle, n'est pas très encourageant.
Si vous avez de l'expérience sur le sujet, faites-moi signe.
merci d'avance à tous (débutants ou expérimentés §
Jac

ultra-sons
Débuté par JIG, nov. 27 2012 06:29
4 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 novembre 2012 - 08:51
Salut,
J'avais exactement la même interrogation sur un de mes robots. En fait il n'y a pas de réponses précise, ça dépend de tes besoin.
Perso j'utilisais un seul capteur incliné pour longer un mur avec un asservissement en distance, et il s'avérait que même si c'était la distance par rapport au mur que je longeais qui m'intéressait le plus, afin d'éviter les obstacle pouvant arriver en face j'avais besoin d'incliner mon capteur d'avantage vers l'avant.
Par contre toi tu en as déjà 1 qui capte vers l'avant et 1 de chaque coté donc c'est à toi de voir ce dont tu as le plus besoin: d'avantage détecter l'avant ou les coté ... Moi je te dirais que comme la plus part du temps ton robot avance c'est mieux d'augmenter la détection vers l'avant... après si ton but est de longer un mur je ne te conseillerais pas forcément la même chose ... Ensuite, le capteur à l'arrière n'est pas inutile si tu programme la marche arrière : ça te permet de faire demi tour dans les zones très étroite et sans collision.
Après aussi ça dépend aussi de ce que tu entends valeur irrationnel, est ce que tu utilise tout tes capteurs en même temps ou est ce que tu les actionne un par un ? Car si cela se trouve vu la densité de tes capeurs US sur ton robot il est possible que tes capteur longitudinaux parasitent tes capteur à 45° ce qui expliquerais que tu remarque une distance mesuré par ces capteurs inférieur à ce qu'elle devrait être voir même une alternance entre 2 valeurs ...
N'hésite pas à donner plus de détails : plan du robot et position des capteurs, ref des capteurs, cône de détection des capteurs, mode d'utilisation ( tous en même temps ou certains à certains moments), but du robot , etc ...
J'avais exactement la même interrogation sur un de mes robots. En fait il n'y a pas de réponses précise, ça dépend de tes besoin.
Perso j'utilisais un seul capteur incliné pour longer un mur avec un asservissement en distance, et il s'avérait que même si c'était la distance par rapport au mur que je longeais qui m'intéressait le plus, afin d'éviter les obstacle pouvant arriver en face j'avais besoin d'incliner mon capteur d'avantage vers l'avant.
Par contre toi tu en as déjà 1 qui capte vers l'avant et 1 de chaque coté donc c'est à toi de voir ce dont tu as le plus besoin: d'avantage détecter l'avant ou les coté ... Moi je te dirais que comme la plus part du temps ton robot avance c'est mieux d'augmenter la détection vers l'avant... après si ton but est de longer un mur je ne te conseillerais pas forcément la même chose ... Ensuite, le capteur à l'arrière n'est pas inutile si tu programme la marche arrière : ça te permet de faire demi tour dans les zones très étroite et sans collision.
Après aussi ça dépend aussi de ce que tu entends valeur irrationnel, est ce que tu utilise tout tes capteurs en même temps ou est ce que tu les actionne un par un ? Car si cela se trouve vu la densité de tes capeurs US sur ton robot il est possible que tes capteur longitudinaux parasitent tes capteur à 45° ce qui expliquerais que tu remarque une distance mesuré par ces capteurs inférieur à ce qu'elle devrait être voir même une alternance entre 2 valeurs ...
N'hésite pas à donner plus de détails : plan du robot et position des capteurs, ref des capteurs, cône de détection des capteurs, mode d'utilisation ( tous en même temps ou certains à certains moments), but du robot , etc ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 27 novembre 2012 - 10:56
Salut, tes deux capteur a 45° pointe les vers l'avant sans les changé de place, Je ne sais pas quelle taille fait ton robot, mais avec 2 Us sur la face avant ca le fait.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#4
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 28 novembre 2012 - 11:51
Par ailleurs, j'ai remarqué sur le BOB3 de Léon que ses ultra-sons étaient disposés verticalement. Est-ce mieux ?
En pratique, oui, car en fait, le cône de mesure n'est pas parfaitement droit (sur les deux "yeux", l'un est émetteur et l'autre récepteur), donc la distance mesurée, n'est pas exactement celle en face du capteur. Si tu as besoin d'une mesure précise, il peut être intéressant de les redresser (tu ne feras plus une erreur sur la position horizontale mais sur la hauteur de l'obstacle), sinon je pense que ça n'est pas essentiel. Dans la mesure où l'US est utilisé comme "yeux", il est esthétiquement plus joli de les laisser à l'horizontale. C'est beau l'anthropomorphisme.

#5
JIG
-
- Membres
- 19 messages
Nouveau membre
Posté 29 janvier 2013 - 11:49
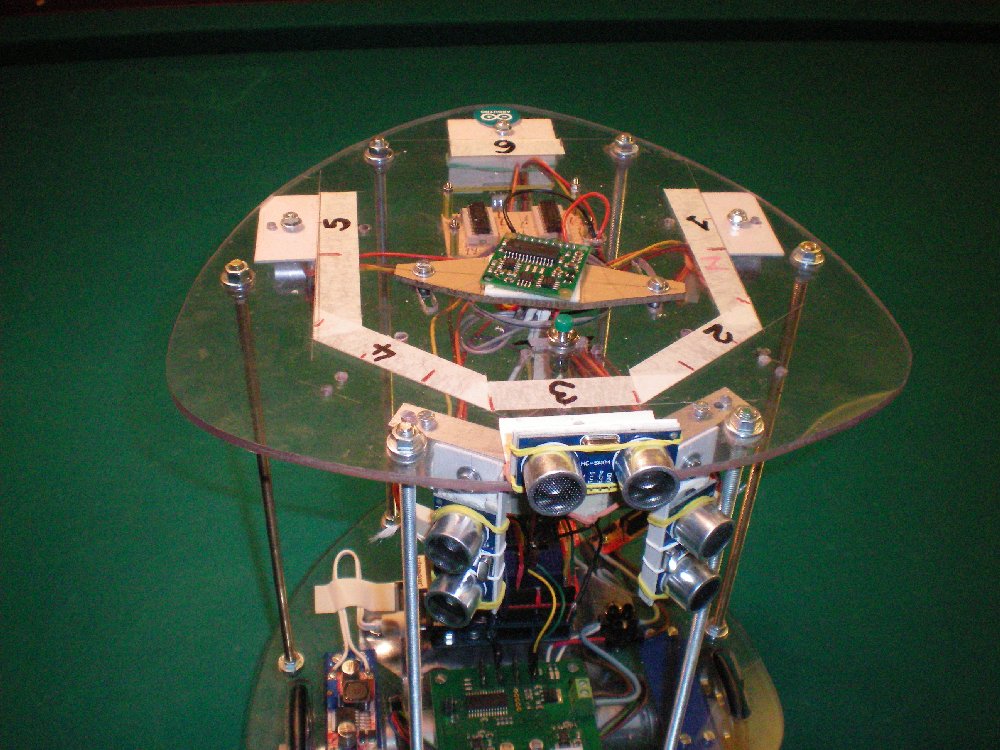
Pour répondre aux questions, mon robot fait 20cm d'encombrement en largeur et longueur et environ 30cm en hauteur.
Je joins une paire de photos pour vous montrer la disposition des capteurs ultra-son que j'ai finalement adoptée.
une photo vue de dessous/devant et une du dessus/devant.
Celui de l'avant est au-dessus des autres car j'ai du mobilier et une cheminée qui nécessitent la detection à cette hauteur.
La mesure des ultra-sons se fait séparément les unes des autres.
Je joins également ma routine de lecture des ultra-sons que j'ai adopté, pour obtenir une valeur à peu près correcte.
Les ultra-son utilisés sont des SRF04 venant de Hong-Kong (environ 15 euros les 10)
Je joins une paire de photos pour vous montrer la disposition des capteurs ultra-son que j'ai finalement adoptée.
une photo vue de dessous/devant et une du dessus/devant.
Celui de l'avant est au-dessus des autres car j'ai du mobilier et une cheminée qui nécessitent la detection à cette hauteur.
La mesure des ultra-sons se fait séparément les unes des autres.
Je joins également ma routine de lecture des ultra-sons que j'ai adopté, pour obtenir une valeur à peu près correcte.
Les ultra-son utilisés sont des SRF04 venant de Hong-Kong (environ 15 euros les 10)
Image(s) jointe(s)

Fichier(s) joint(s)
-
 lecture ultra-sons.txt 4,2 Ko
259 téléchargement(s)
lecture ultra-sons.txt 4,2 Ko
259 téléchargement(s)








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

