

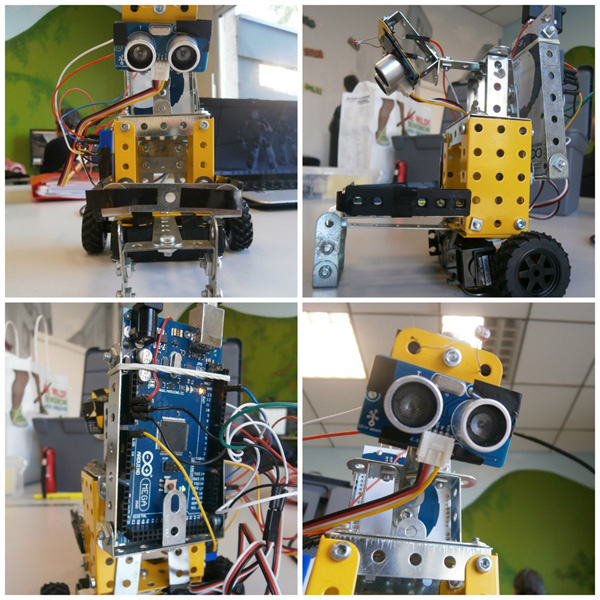
Voici First, mon premier robot.
Il est contrôlé par une carte Arduino MEGA. Il possède deux roues contrôlées chacune par un moteur à rotation continue. La structure est faite en partie avec des Meccano que j'ai récupéré.
Au niveau de la tête, il possède un capteur d'obstacle à ultrason (celui ci http://www.seeedstudio.com/wiki/Grove_-_Ultrasonic_Ranger). J'ai pas mal de soucis à le faire fonctionner.
Toujours au niveau de la tête, il y a aussi une photo-résistance.
A ce jour, le robot avance tout droit lorsque je le dirige à l'aide d'une torche. (Si lumière détectée, il avance. Sinon il reste immobile).
J'aimerais dans les semaines et mois à venir faire ceci :
- Activer le capteur d'obstacle à ultrason et faire qu'il s'arrête si il détecte un obstacle.
- Rajouter deux photorésistances, de chaque côté
- Intégrer des détecteurs Infra-rouge
- Rajouter des capteurs de chocs
Et bien d'autres idées... Si vous en avez je suis preneur




 )
)



















