
Bonjour à tous
Je suis Vaelan mon niveau d'étude se limite à un CAP mécanique auto ,je travaille dans le batiment et j arrive du monde de l’aéromodélisme qui m as fais découvrir celui des microcontrôleur.J ai donc décidé de quitter la planète des hélicos pour partir à l'aventure à travers l'univers de la robotique.
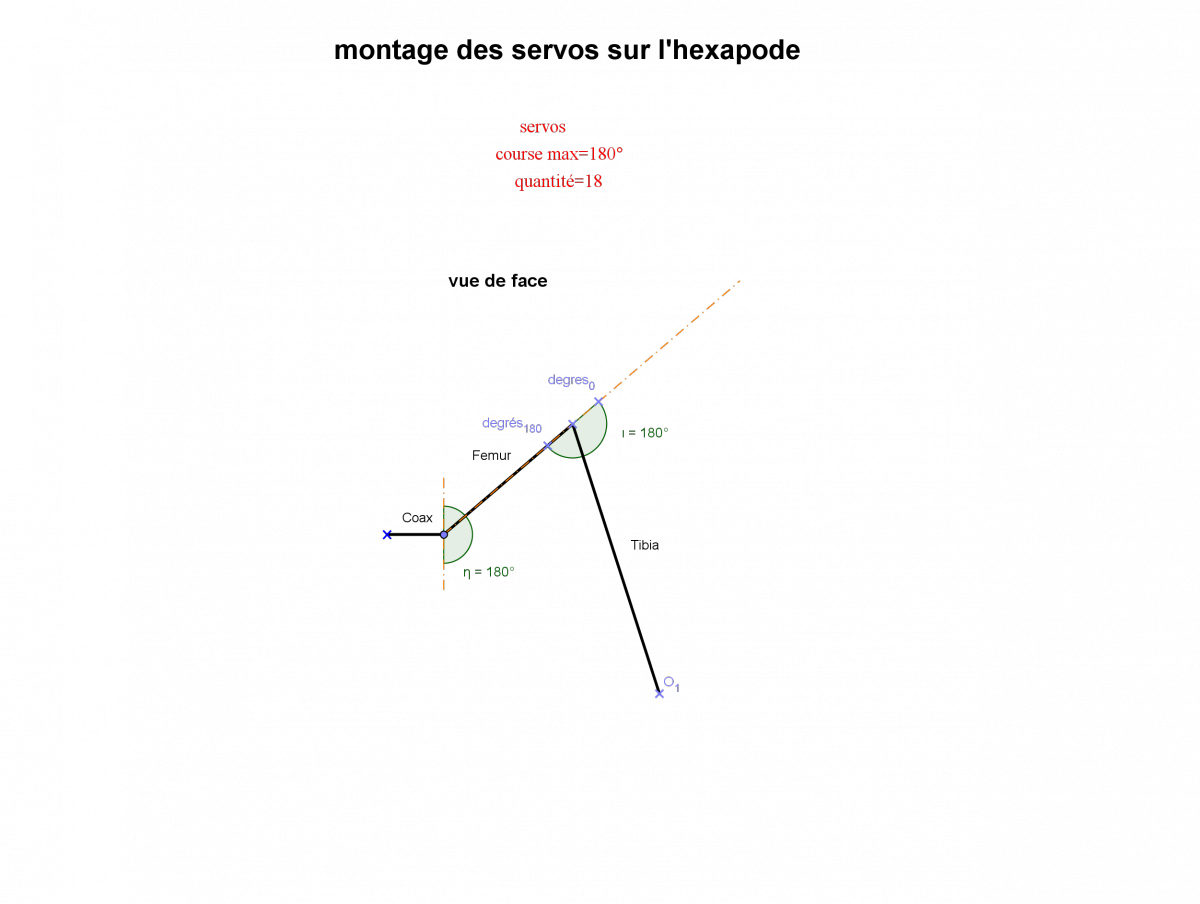
Je me suis donc offert le châssis d'un hexapode sur lequel j'ai monté une Arduino un SSC32 et 18 servo a 180° le tout commandé avec ma radio aurora9.
Après quelque essaie les premier problème se son posé: trajectoire mal maîtrise ,les pattes glisse sur le sol,programmation patte par patte laborieuse..... je me suis donc lancé dans la programmation d'une cinématique inversé .Une petite recherche sur supergoogle et ..........WAOUH.....ça à l'air super compliqué et pour la plupart en anglais.
Donc j'ai décidé de me créer la mienne à moi perso  )))
)))
Je vais donc vous exposer mon travail (dans les jours, les semaines, les mois qui viennent) pour que les meilleur d'entre vous, puisse me donner des critiques constructive et ne connaissant pas les normes du langage mathématique,me corriger si je ne suis pas clair dans mes explication ou que je suis dans l erreur.Pour ceux,qui comme moi voudrais se lancer, leur donner peut être une orientation.
Pour commencer mon cahier des charge:
ma radio ne dois contrôler que le centre de mon hexapode.
la cinématique inversé dois pouvoir être contrôlé par un gyroscope 3 axes.
l hexapode dois gérer tout ses mouvements sans glissement et en respectant des trajectoire propre
Voici les élément que je vais utiliser pour créer la cinématique inversé
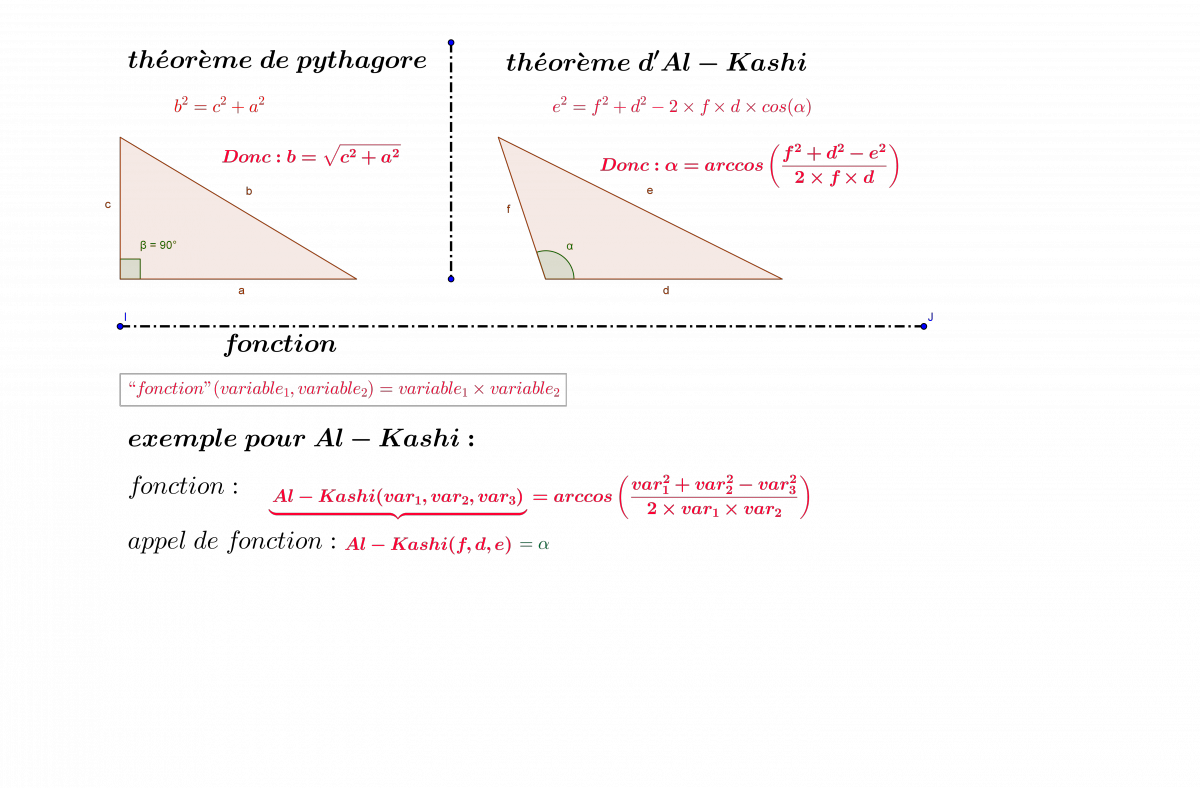
pas grand chose donc mais pour l instant ça a l air de suffire.
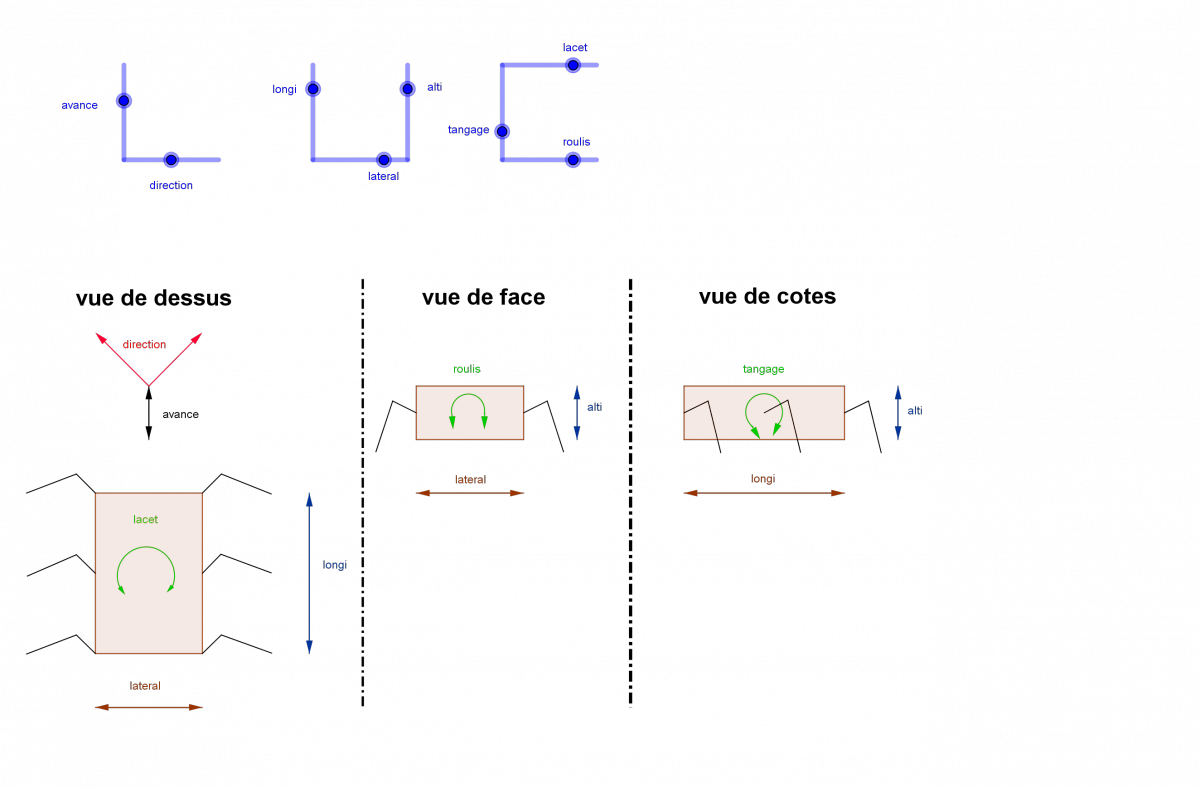
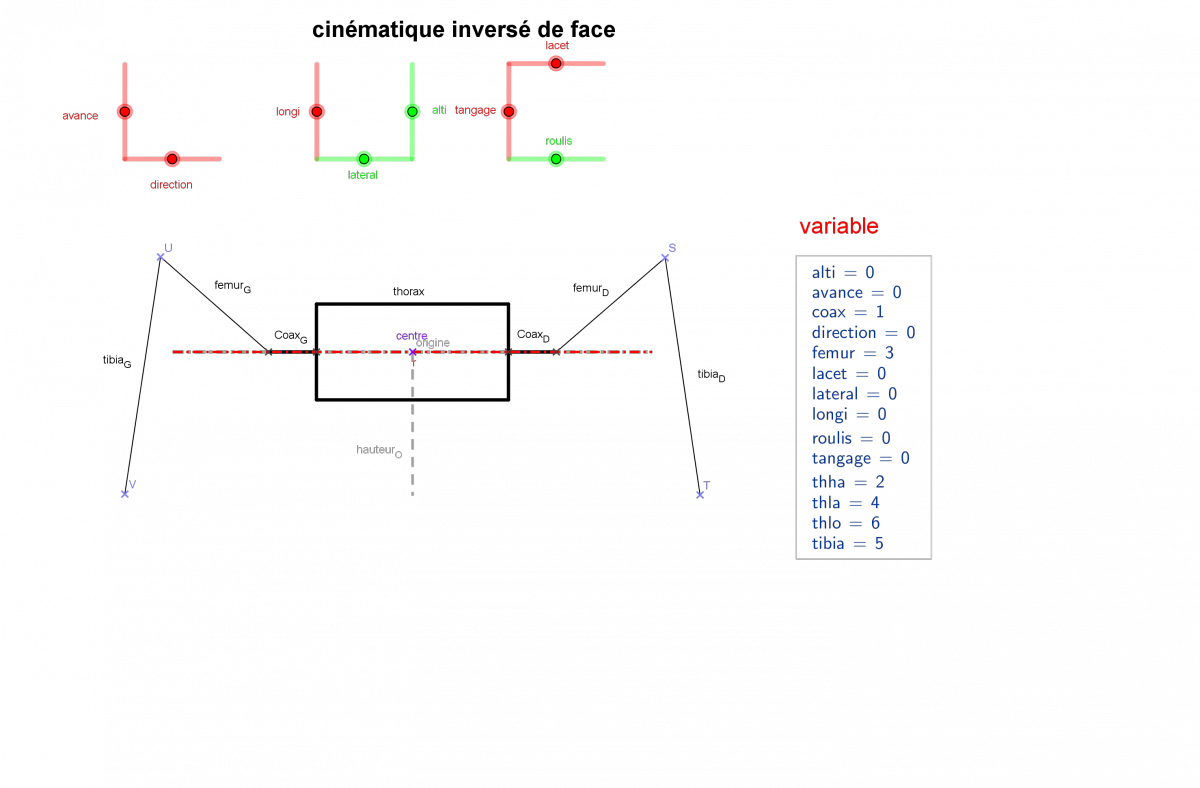
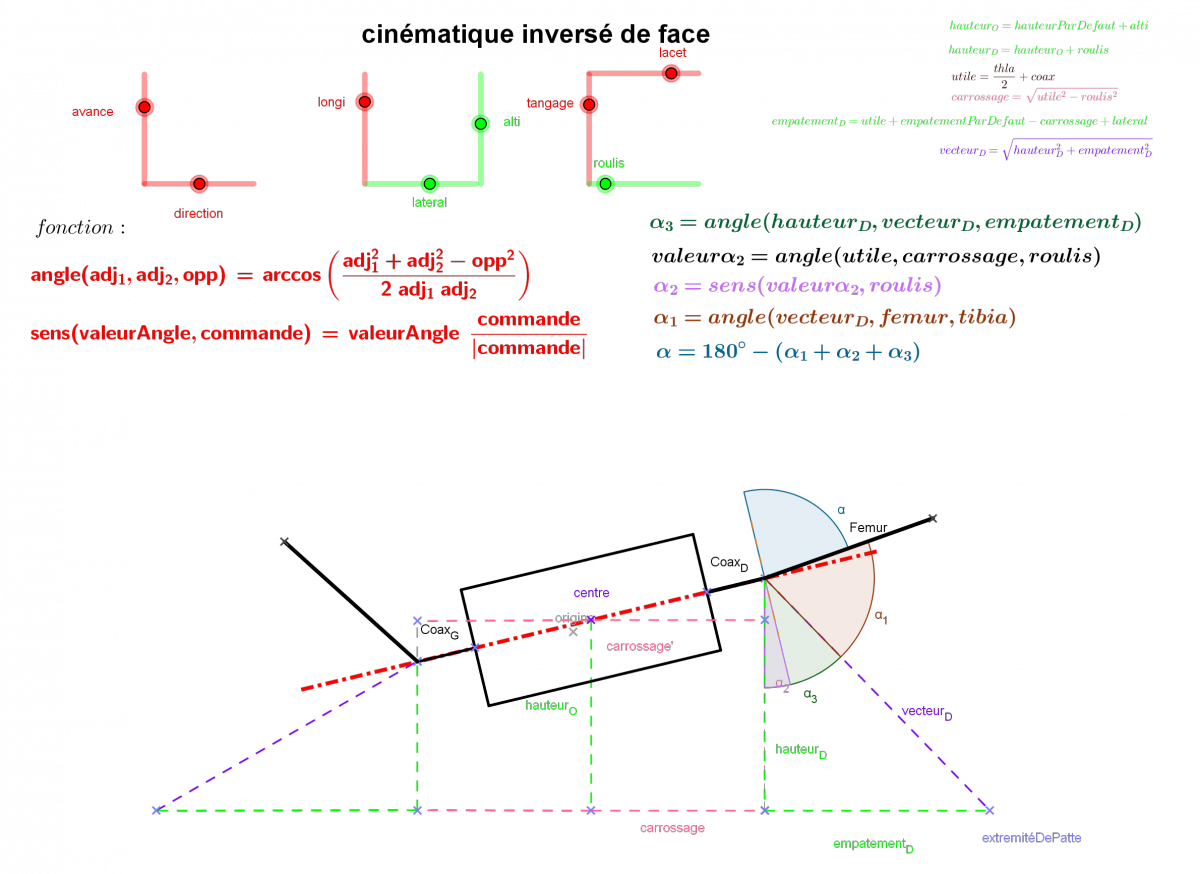
les différente commandes à prendre en compte, notez que le roulis,tangage et lacet seront aussi géré ,a terme, par un gyroscope.
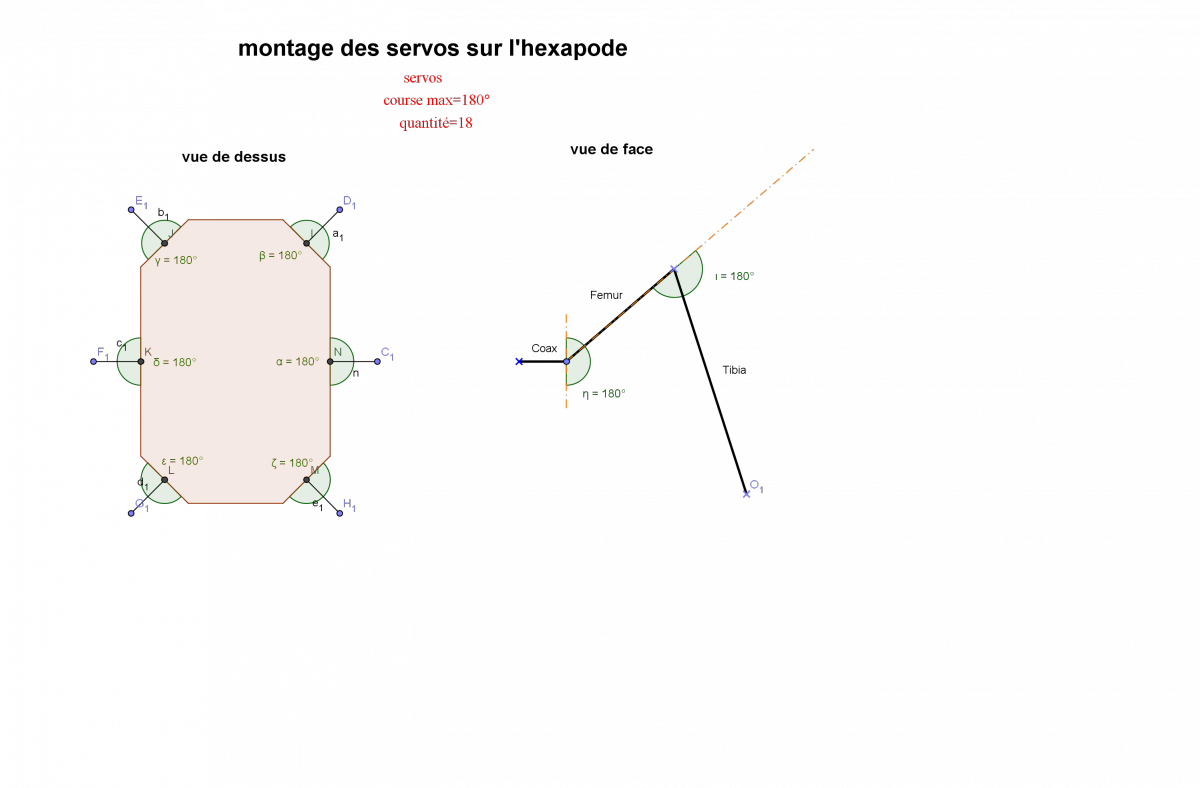
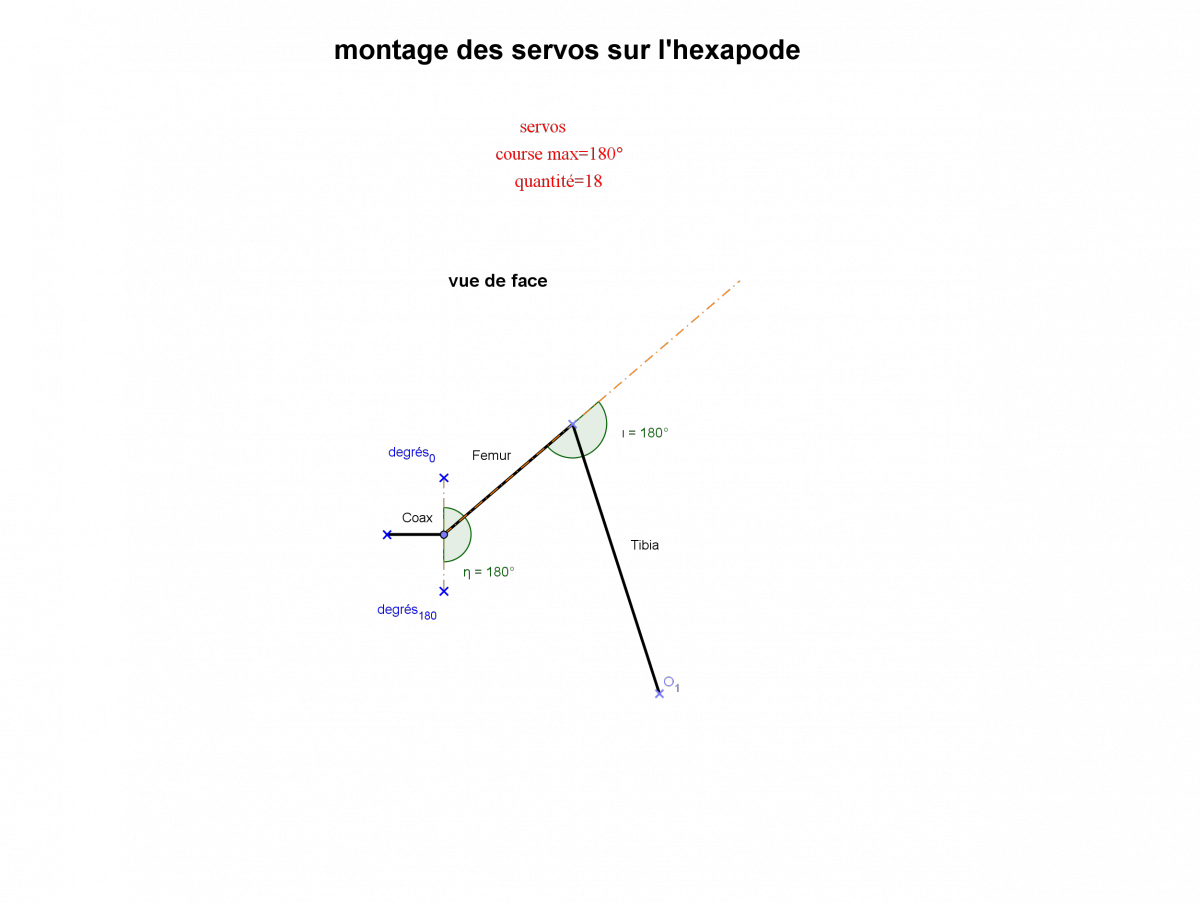
montage et course max des servos sur le robot.
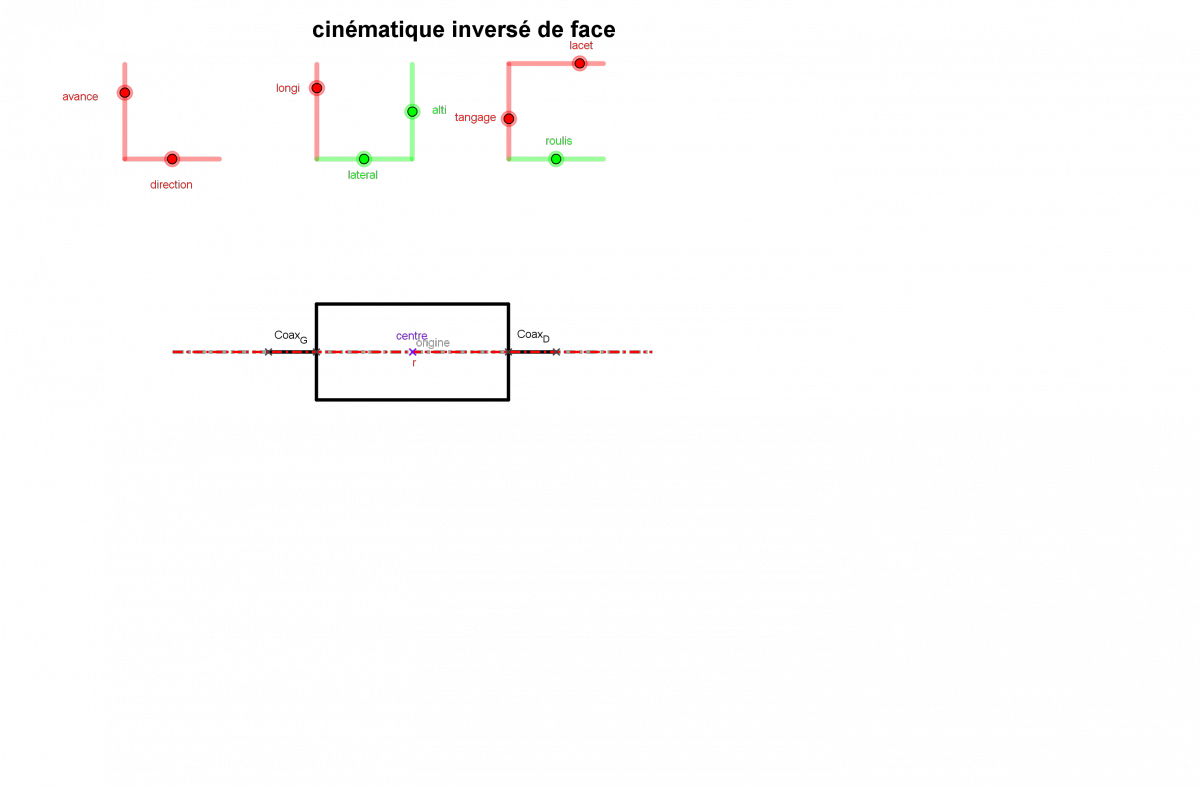
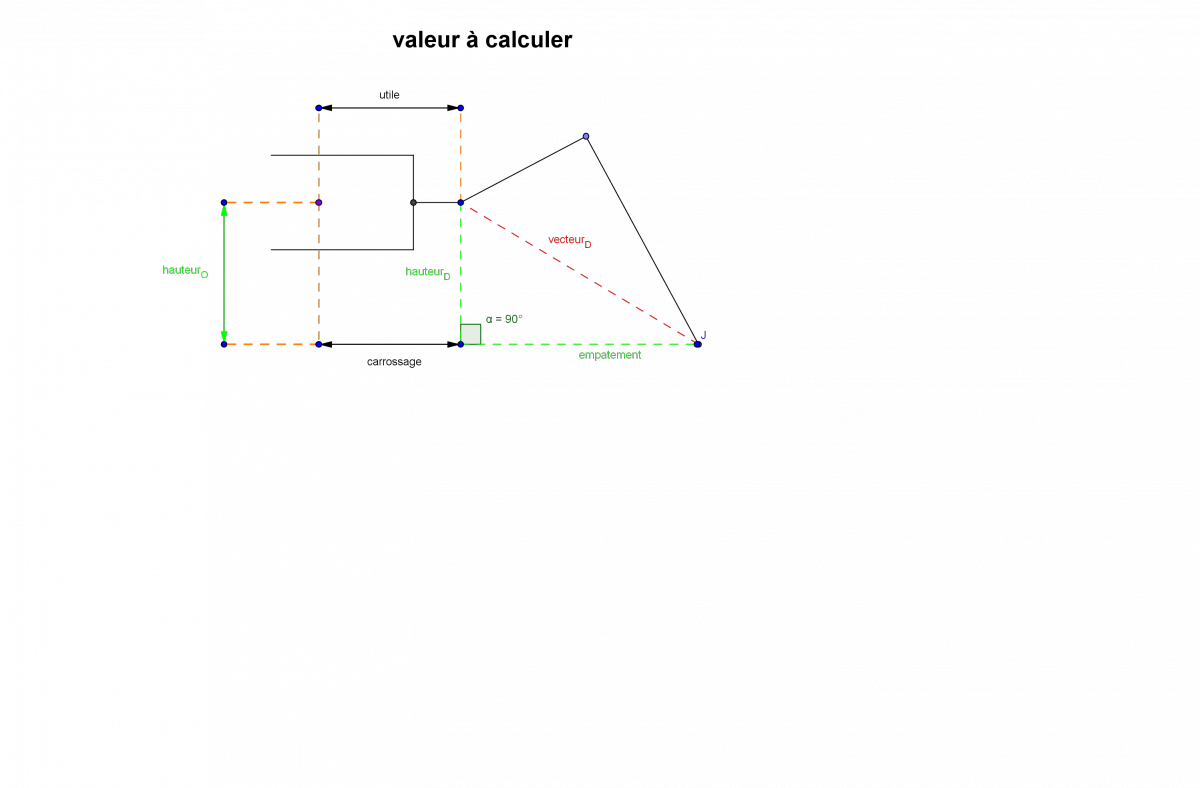
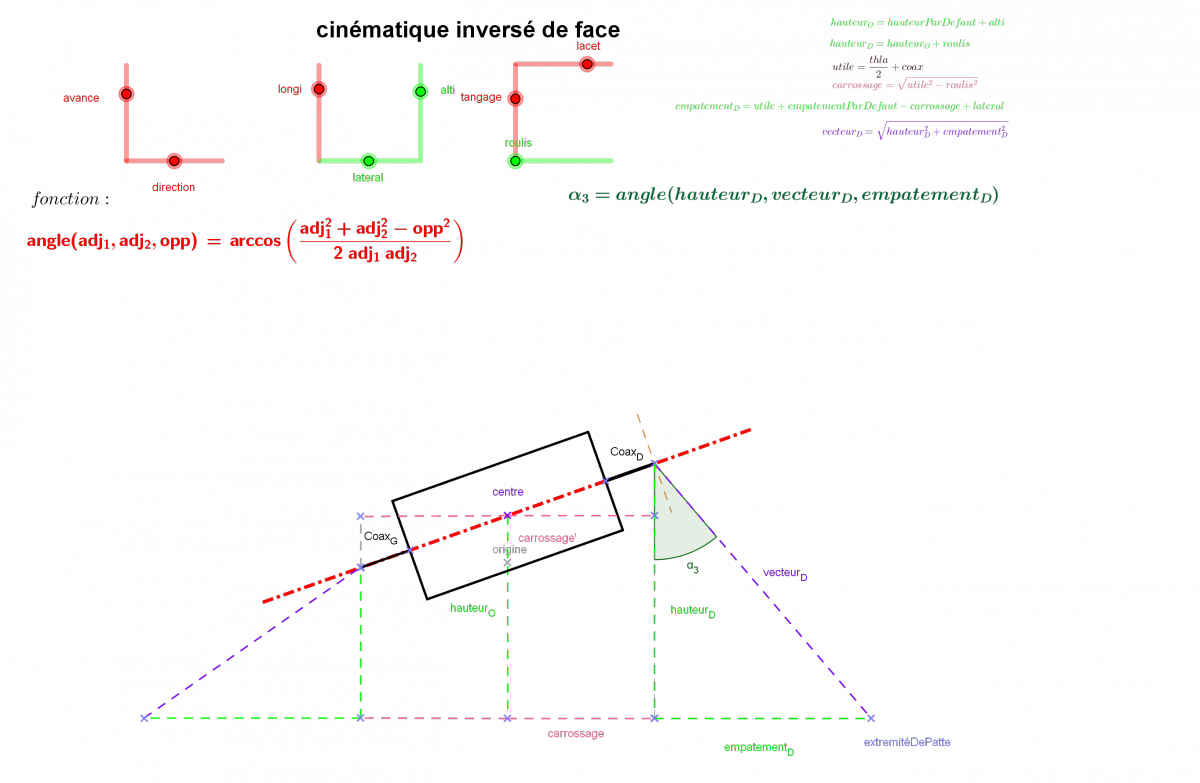
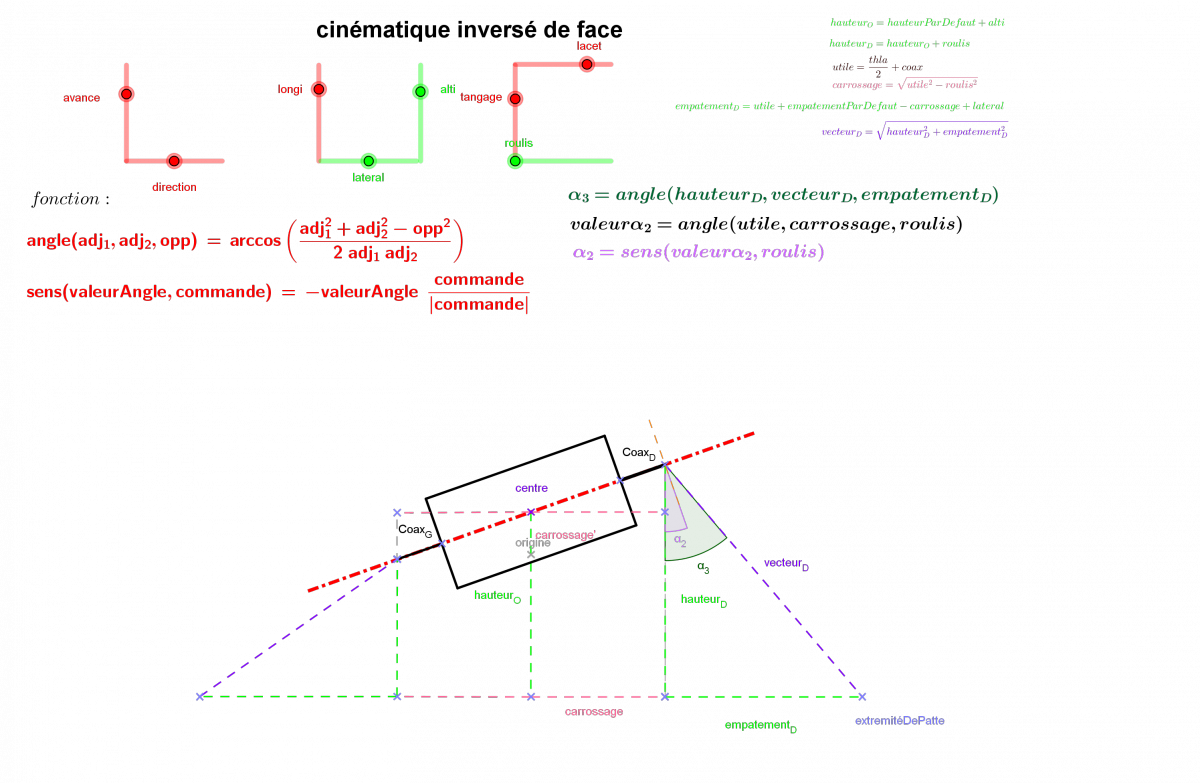
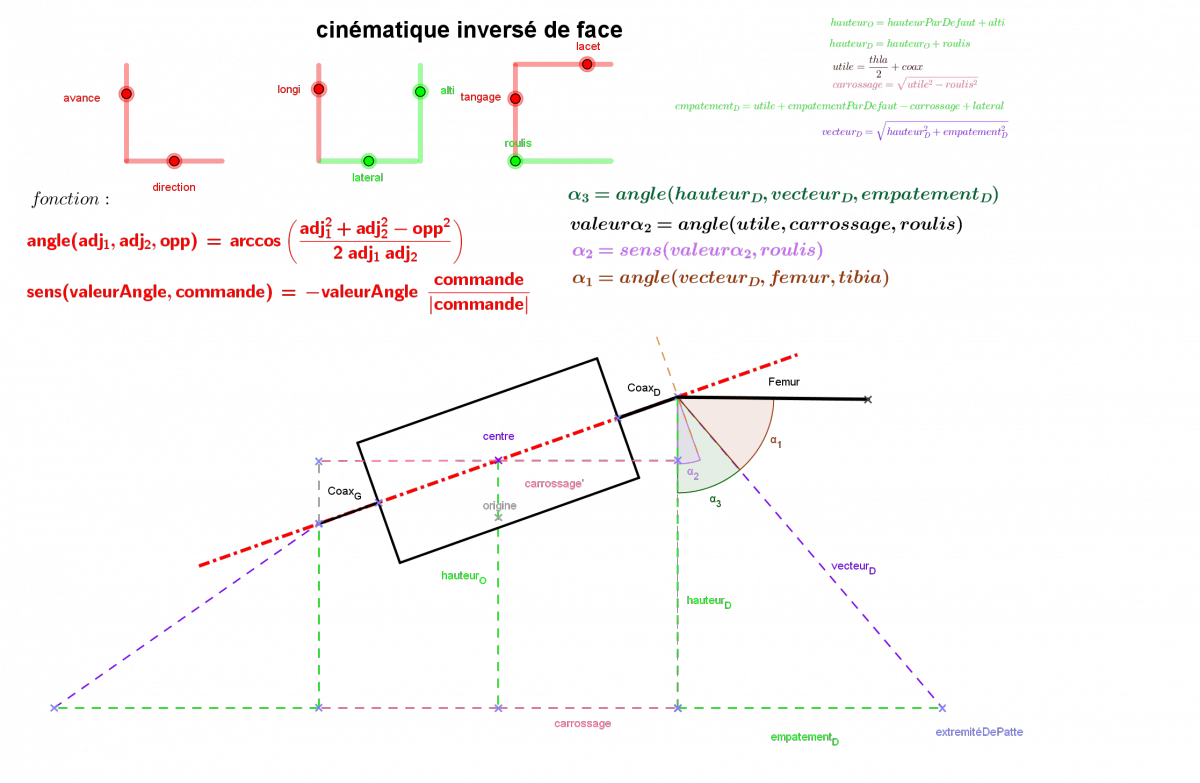
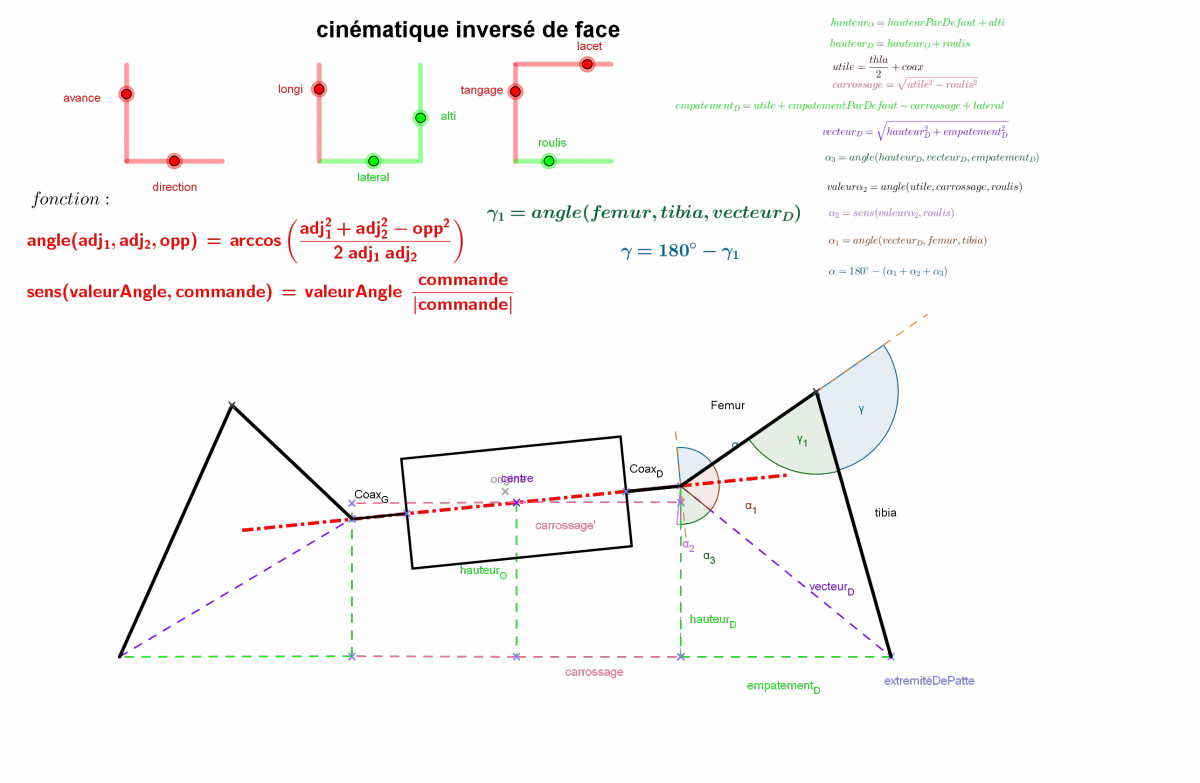
Première étape, cinématique inverse vu de face:
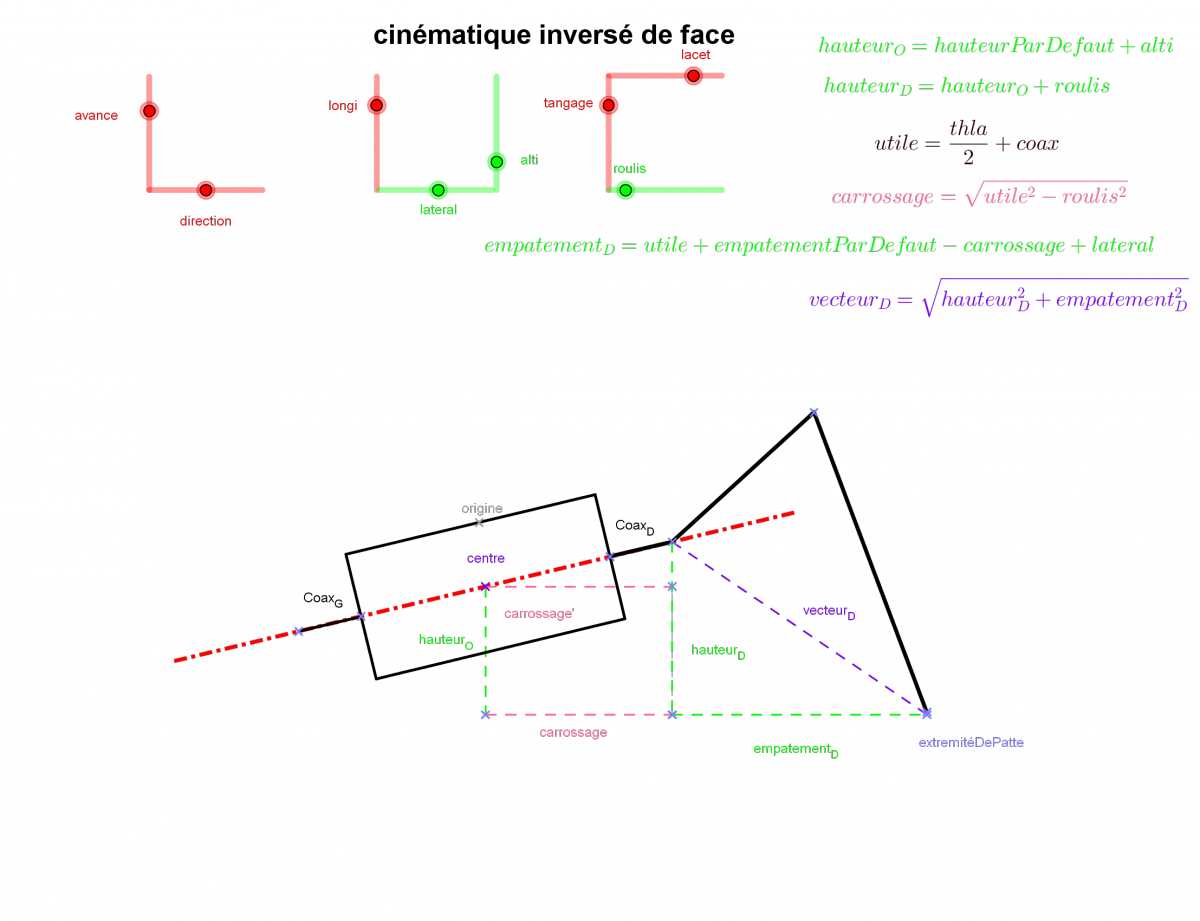
J'ai définis un point d'origine (en gris sur le schéma) qui représente la position par défaut du centre de gravité de CR6VA1 quand toute mes commande de radio sont au neutre(position centrale pour les manche par exemple) et le centre de gravité réel (en violet sur le schéma)ainsi que l axe de roulis (en rouge) qui sont les seul valeur connu avec les mensuration du robot tout le reste dois être calculé par le programme.
lien dynamique,commande alti/lateral/roulis :

















![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)





