Voici une chenille avec galets et barbotin.

 1 note(s)
1 note(s)
Robot à chenille téléguidé
Débuté par VIGUIEG, oct. 31 2023 09:49
chenille télécommande arduino NRF24 L01 Exploration plateforme
96 réponses à ce sujet
#41

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 04 novembre 2023 - 07:00
- ChinaEmoni aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#42
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 05 novembre 2023 - 08:02
Je vais prendre celle là mais fois 4 du coup pour pouvoir les assembler ensemble et avoir une belle longueur de chenille (x2 de chaque côté).
Pour le driver, je vais prendre celui-ci je pense :
https://fr.aliexpres...0250002757175_3
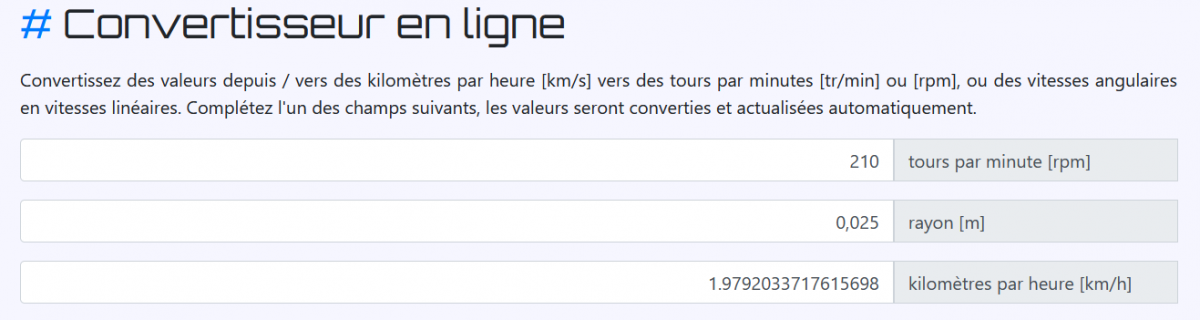
Il a l'air de correspondre avec ces moteurs (en 210rpm) :
https://fr.aliexpres...ayAdapt=glo2fra

#43
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
#44
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
#45
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 05 novembre 2023 - 09:14
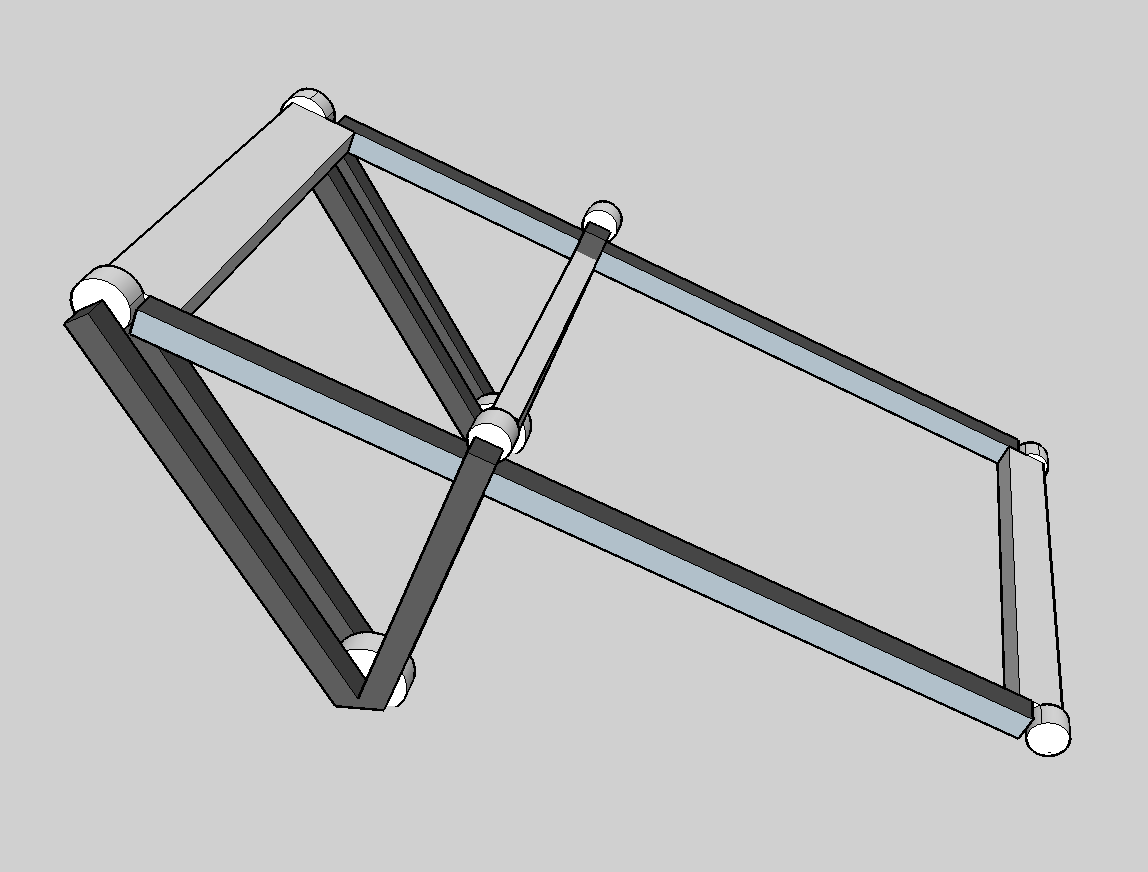
Si j'ai bien compris, ces barbotin là servent à tendre la chenille lorsque la suspension fonctionne ? (lorsque le robot franchit un obstacle)
#46
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
#47
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 05 novembre 2023 - 09:51
Pour les suspensions, j'ai de vieux ressorts d'imprimantes. Je pense que ça va marché, sinon j'ai des tendeurs ou des gros élastiques.
#48
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 novembre 2023 - 02:36
Si j'ai bien compris, ces barbotin là servent à tendre la chenille lorsque la suspension fonctionne ? (lorsque le robot franchit un obstacle)
Exactement ! L'idée, c'est de pouvoir encaisser un grand débattement sans décheniller.
C'est peut être un effet du dessin, mais ces 2 bras ne doivent pas être relié. Chaque train de chenille doit rester indépendant.
Il me semble que ton moteur, à 210rpm, n'a pas assez de couple.
1.7kg.cm, ce n'est pas beaucoup.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#49
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 05 novembre 2023 - 02:44
Effectivement, c'est un effet de perspective. Ils ne sont pas reliés.
Il faudrait combien niveau couple au minimum ?
#50
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 05 novembre 2023 - 02:53
Celui-ci m'a l'air mieux :
https://fr.aliexpres...ayAdapt=glo2fra
Et en plus le driver est compatible niveau tension et intensité !
#51
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
#52
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 novembre 2023 - 07:40
2,3 kg/cm ç'est mieux non ?
Je ne veux pas te dire de bêtise. Je suis incapable de faire ce type de calcul.
Voici une page qui donne les couples des moteurs Lego. https://philohome.co...ec/pfcurves.htm
Sur mon char, j'utilise les moteurs Power Functions XL.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#53
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 novembre 2023 - 08:53
Je vais essayer, mais je ne garantis rien.
Sur cette autre page, Philo indique que le Power Functions XL fait environ 220rpm et 40N.cm https://philohome.com/pf/pf.htm
Soit 40N.cm = 4kg.cm si j'en crois cette page https://www.translat...ton centimeter/
Mais attention, mon char ne va pas très vite.
A ta place, je commencerais par doubler ce chiffre, soit 8kg.cm
Et comme tu as choisi d'avoir 2 moteurs alors que moi, j'en avais 4, cela fait 16kg.cm
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#54
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 05 novembre 2023 - 11:02
Il faut bien comprendre que les véhicules à chenilles sont les véhicules les plus gourmand en énergie.
Les moteurs ont besoin d’un gros couple.
Commence par faire le châssis de ton robot, comme ça tu connaitras déjà le poids à vide et tu pourras « calculer » la puissance des moteurs.
C'est pour cela que les véhicules à chenilles sont les plus chers à produire.
- Oracid aime ceci
#55
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 06 novembre 2023 - 08:07
Je vais prendre celle là mais fois 4 du coup pour pouvoir les assembler ensemble et avoir une belle longueur de chenille (x2 de chaque côté).
Attention, l'axe du barbotin est de 4mm. Je pense que cela peut aller jusqu'à 6mm.
Voici le commentaire sur la boutique :
- "The inner diameter of the drive wheel is 4mm by default. If you need other sizes, please specify when ordering;"
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#56
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 06 novembre 2023 - 08:08
Je voudrai mettre les chenilles ensembles. (en désassemblant deux chenilles que je réassemble ensemble)
#57
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 06 novembre 2023 - 08:10
Il faut bien comprendre que les véhicules à chenilles sont les véhicules les plus gourmand en énergie.
Les moteurs ont besoin d’un gros couple.
Commence par faire le châssis de ton robot, comme ça tu connaitras déjà le poids à vide et tu pourras « calculer » la puissance des moteurs.
C'est pour cela que les véhicules à chenilles sont les plus chers à produire.
Je comprends maintenant pourquoi...
Il faudrait donc au moins un minimum de 20kg/cm (tout moteurs compris).
#58
VIGUIEG
-
- Membres
- 66 messages
Membre
- Gender:Male
-
Interests:Robotique
Mécanique
https://www.youtube.com/@DIY-RobotsTech/videos
Posté 06 novembre 2023 - 08:12
Comment trouver des moteurs ayant un fort couple et une grande vitesse de rotation (environ 300 rpm minimum).
D'après ce que je vois depuis que je cherche, lorsque le couple augmente, la vitesse diminue.....
#59
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 06 novembre 2023 - 09:16
D'après ce que je vois depuis que je cherche, lorsque le couple augmente, la vitesse diminue.....
Et oui, c'est bien ça le problème.
Pourrais-tu nous expliquer exactement ton objectif avec ce char.
Dans ton premier post, tu dis "fabriquer une plateforme à chenille téléguidé avec un bras et une caméra afin de réaliser l'exploration de lieux divers et variés."
Si c'est vraiment cela ton objectif, alors tu n'as pas absolument besoin d'une très grande vitesse. Ce n'est pas un char de combat que tu veux faire.
On atteint rarement son objectif dès la première version. Voir, jamais.
Peut-être qu'accepter l'idée d'une première version qui va évoluer dans le temps, serait la solution.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#60
Sandro
-

- Modérateur
-
- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 07 novembre 2023 - 09:46
Bonsoir,
Pour les moteurs avec réducteur, tu as 2 parties :
- le moteur : plus tu veux un moteur puissant (la puissance, c'est couple*vitesse), plus il sera lourd, gros, cher et gourmand en énergie.
- le réducteur : il permet de répartir la puissance entre la vitesse et le couple. À moteur donné, tu aura (approximativement) la même puissance. Mais tu peux augmenter le couple au détriment de la vitesse ou vice-versa.
Pour controler les moteurs, je te déconseille vivement les relais, qui ne permettent qu'un contrôle en tout ou rien (et ne te permettant donc pas de contrôler ta vitesse ou de tourner avec un rayon donné). Je te conseille vivement de prévoir un driver pour moteurs DC (un par moteur ou un seul qui en gère plusieurs). Je te conseilles soit d'en choisir un avec limitation de courant (ou de surchauffe), soit d'en prendre un qui supporte le courant bloqué de tes moteurs avec une bonne marge. Autrement, si avec ton robot tu buttes contre un mur, tu risque de cramer ton driver.
Et par pitié, évite la famille des L298 : c'est des antiquités avec des performances horribles (https://www.st.com/r...asheet/l298.pdf) : à 1A, tu as entre 1.8V et 3.2V de perdu dans le pont en H, à 2A tu peux perdre jusqu'à 4.9V de tension. Toute cette tension est dissipée en chaleur, donc il faut refroidir le L298 (et tu vides inutilement ta batterie).
@Mike : pourquoi continuer à vendre un composant aussi antique? (il semblerait qu'il existait déjà au milieu des années 70 (https://forum.arduin...98-age/480905/2), c'est à dire quand mes parents étaient des gosses!)
- Oracid aime ceci
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : chenille, télécommande, arduino, NRF24 L01, Exploration, plateforme
![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




