

Bonjour tout le monde
J'ai récemment fait une petite introduction à mon projet et ici je vais essayer de le détailler du mieux que je peux.
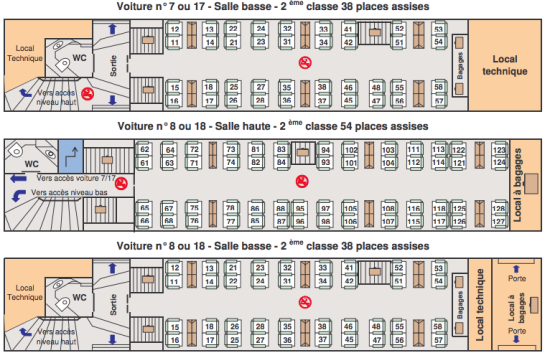
Le but est que ce robot accompagne les personnes en fauteuil roulant du quai d'origine au quai de destination (tout au long du trajet en train).
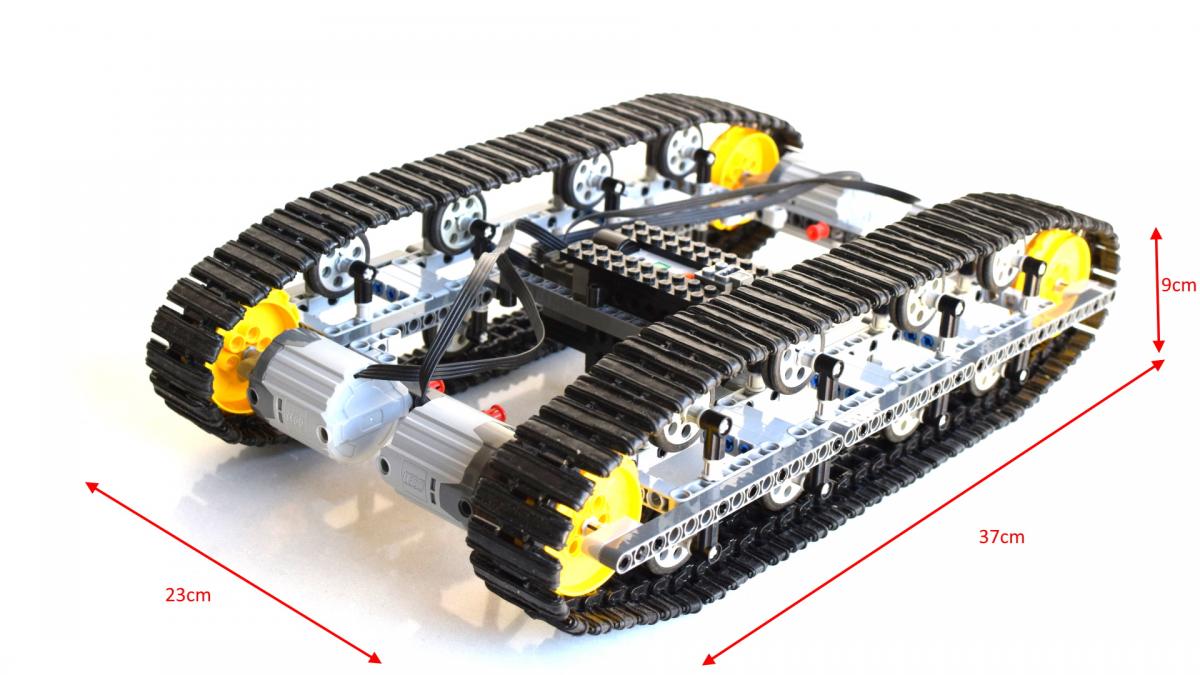
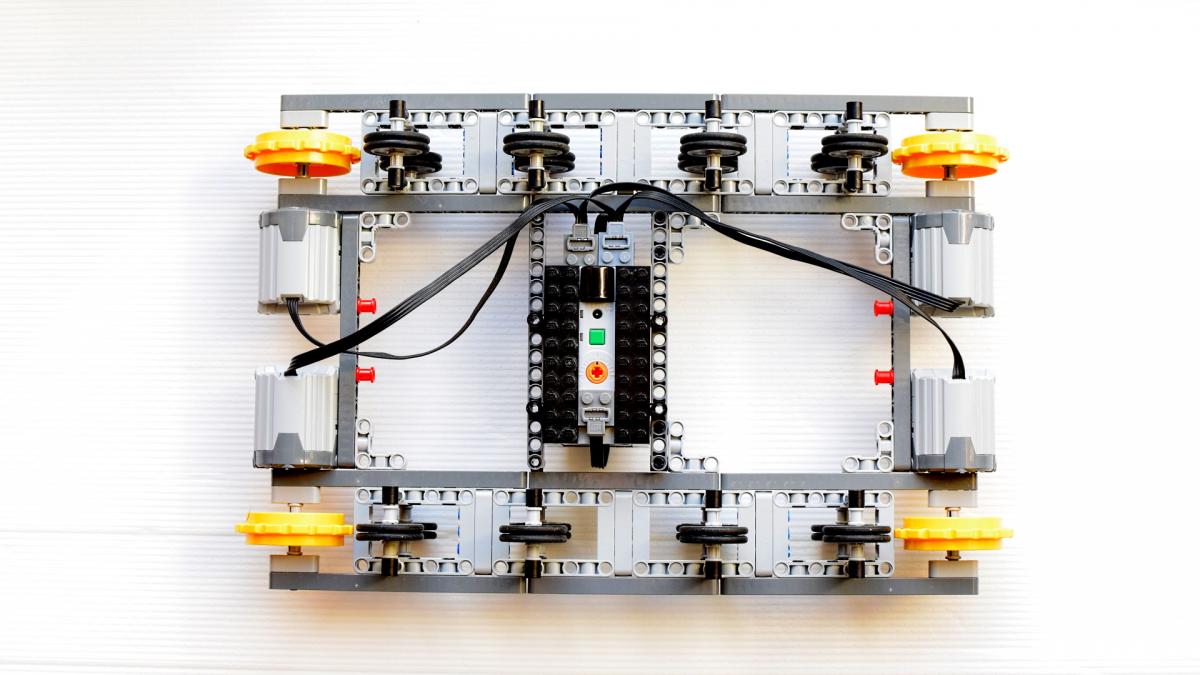
C'est un prototype, donc ses dimensions ne sont pas réelles (maximum un couple paumes) mais proportionnels et seront contrôlées par la carte ESP32.
Il se compose de plusieurs parties.
Le en charge du mouvement; la structure et les roues avec les moteurs respectifs, qui seront comme ceux des réservoirs (les appelez-vous des roues de chenille?) et quelques suiveurs de ligne pour à l'intérieur du train.
Celui en charge de la sécurité; où nous avons un capteur à ultrasons pour détecter les obstacles, des indicateurs LED, alarme avertisseurs sonore et un électro-aimant où la chaise sera fixe.
Celui en charge de l'accès à la plateforme robotique; une rampe escamotable, qui sera déplacée par un pignon-crémaillère puis basculée.
Celui en charge de l'accès au train; une plate-forme avec accéléromètre pour régler l'inclinaison afin que la chaise soit toujours à plat malgré l'inclinaison du robot lors de l'embarquement dans le train. Il intégrera également un capteur de force pour ajuster le contrôle.
La communication; de donner des petites instructions entre le robot et l'utilisateur (même si son fonctionnement est autonome) pour bluetooth.
J'ai la partie capteur sous contrôle, ce qui me fait grincer c'est la partie plus mécanique.
Enfin je partage que puisque l'opérateur ne me fournit pas les tailles des trains je prends un mètre ruban quand je monte dans le train et je fais du travail sur le terrain.






















![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)




