

 Bonjour à tous !
Bonjour à tous !Je me présente, je suis nouveau sur le forum et je n'ai pas énormément d'expérience en robotique. Toutefois, je souhaite progresser aussi vite que possible. Je me suis dit que partager mon projet, mes avancements et mes problèmes serait un bon moyen pour moi de faire un suivi de projet. Cela me permettrait également de créer un blog qui serait utile à tous ceux qui veulent réaliser une base roulante.
J'ai terminé ma première année au sein d'une école d'ingénieurs et je souhaite réaliser un projet auquel les autres étudiants pourraient se référer afin de comprendre des notions de robotique, de CAO, ainsi que de voir ce qui peut se faire en étant étudiant dans mon école.
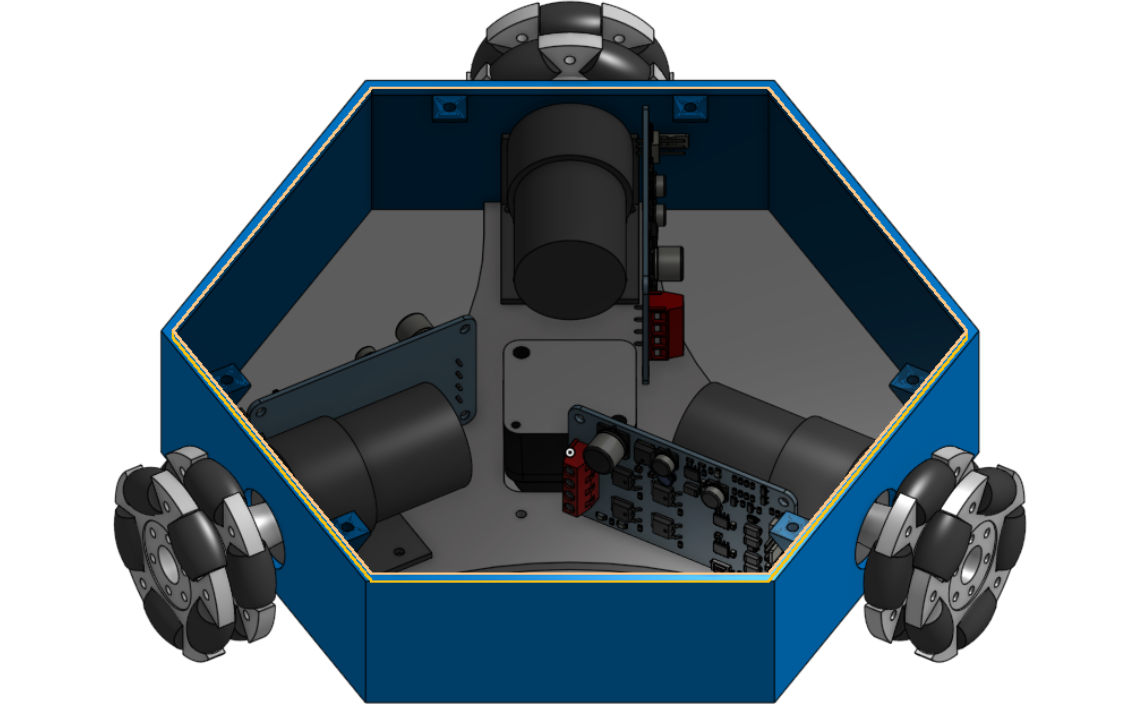
La base roulante a pour but d'être extrêmement modulable. Elle sera composée de plusieurs étages et chacun d'entre eux sera autonome, ils communiqueront en UART et seront a priori contrôlés par des Raspberry Pi Pico, car c'est un microcontrôleur qui m'intéresse. J'ai davantage l'habitude d'utiliser une Teensy 4.0 (j'en suis à ma troisième base roulante autonome), mais je me suis dit que j'allais en profiter pour essayer un nouveau microcontrôleur. Au pire, je retournerai sur la Teensy 4.0.
Le LiDAR est un LD06. Les drivers sont des Cytron (il y en a trois pour des raisons de maintenabilité et de géométrie, et la marque Cytron est une marque de qualité). Les moteurs sont des MG513P30.
Image(s) jointe(s)
- Mike118 aime ceci

















