Contenu de Vinchator
Il y a 205 élément(s) pour Vinchator (recherche limitée depuis 09-juillet 14)
Par type de contenu
Voir pour ce membre
#106827 Robot explorateur
 Posté par
sur 09 décembre 2019 - 06:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 09 décembre 2019 - 06:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
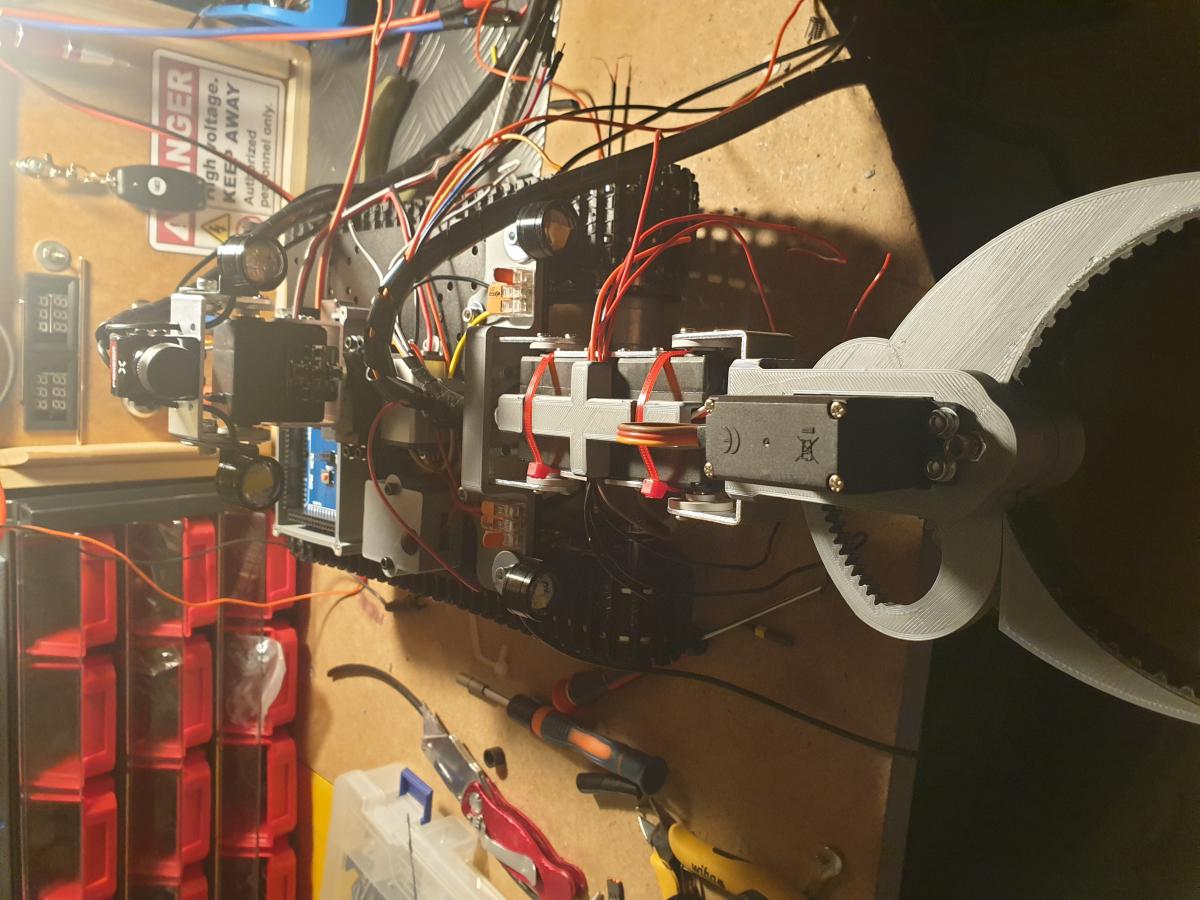
Avancée de la pince avec une couverture de câbles ainsi que la mise en place d'un boitier pour le relai des phares
#106838 Robot explorateur
Posté par
sur 10 décembre 2019 - 01:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je n'ai pas du tout fini la partie hardware du robot mais je souhaite commencer le soft vu que c'est mon point faible...
Soyez indulgents 
J'utilise des HC12 et j'ai regardé à gauche à droite sur le web comment les utilisés...
Ce n'est pas encore très clair pour moi sur la manière d'envoyer des données et de les recevoir sur le récepteur et surtout de les mettre dans " dans l'ordre" car j'ai 5 servos à piloter en pwm, 2 moteurs dc avec un driver l298d donc un pwm et deux digitales sur chaque moteur et un relai.
Alors j'ai essayé d'écrire un code avec une sorte d'ID avant les valeurs.
Pouvez vous me donner votre avis et des tuyaux parce que c'est surement pas la bonne manière de faire je pense...
//Code de l'émetteur ( Arduino UNO + HC12 + 1x Joystick + 5x Potentiometre + 1x Bouton on/off )
#include <SoftwareSerial.h>
#define SW_SERIAL_TX 2 //Branchement HC12
#define SW_SERIAL_RX 3 //Branchement HC12
SoftwareSerial BTSerial(SW_SERIAL_RX, SW_SERIAL_TX);
const int Pin_Direction =A0; //Joystick gauche-droite
const int Pin_Gaz =A1; //Joystick haut-bas
const int Pin_Rotation_Camera =A2; //Potentiometre camera 1
const int Pin_Inclinaison_Camera =A3; //Potentiometre camera 2
const int Pin_Bras1_Pince =A4; //Potentiometre pince 1
const int Pin_Bras2_Pince =A5; //Potentiometre pince 2
const int Pin_Serrage_Pince =A6; //Potentiometre pince 3
const int Pin_Phare = 6; //Interrupteur
void setup() {
Serial.begin(9600);
BTSerial.begin(9600);
pinMode(Pin_Direction, INPUT);
pinMode(Pin_Gaz, INPUT);
pinMode(Pin_Rotation_Camera, INPUT);
pinMode(Pin_Inclinaison_Camera, INPUT);
pinMode(Pin_Bras1_Pince, INPUT);
pinMode(Pin_Bras2_Pince, INPUT);
pinMode(Pin_Serrage_Pince, INPUT);
void loop() {
Valeur_A0 = analogRead(Pin_Direction[1]);
angle = byte(map(Valeur_A0, 0, 1023, 0, 1023));
BTSerial.write(id);
BTSerial.write(angle);
Valeur_A1 = analogRead(Pin_Gaz[2]);
vitesse = byte(map(Valeur_A2, 0, 1023, 0, 255));
BTSerial.write(id);
BTSerial.write(vitesse);
Valeur_A2 = analogRead(Pin_Rotation_Camera[3]);
angle = byte(map(Valeur_A2, 0, 1023, 0, 180));
BTSerial.write(id);
BTSerial.write(angle);
Valeur_A3 = analogRead(Pin_Inclinaison_Camera[4]);
angle = byte(map(Valeur_A3, 0, 1023, 0, 180));
BTSerial.write(id);
BTSerial.write(angle);
Valeur_A4 = analogRead(Pin_Bras1_Pince[5]);
angle = byte(map(Valeur_A4, 0, 1023, 0, 180));
BTSerial.write(id);
BTSerial.write(angle);
Valeur_A5 = analogRead(Pin_Bras2_Pince[6]);
angle = byte(map(Valeur_A5, 0, 1023, 0, 180));
BTSerial.write(id);
BTSerial.write(angle);
Valeur_A6 = analogRead(Pin_Serrage_Pince[7]);
angle = byte(map(Valeur_A6, 0, 1023, 0, 180));
BTSerial.write(id);
BTSerial.write(angle);
}
#106797 Robot explorateur
Posté par
sur 06 décembre 2019 - 11:06
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je trouve ça beau

Merci ca fait plaisir
#106795 Robot explorateur
Posté par
sur 06 décembre 2019 - 06:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
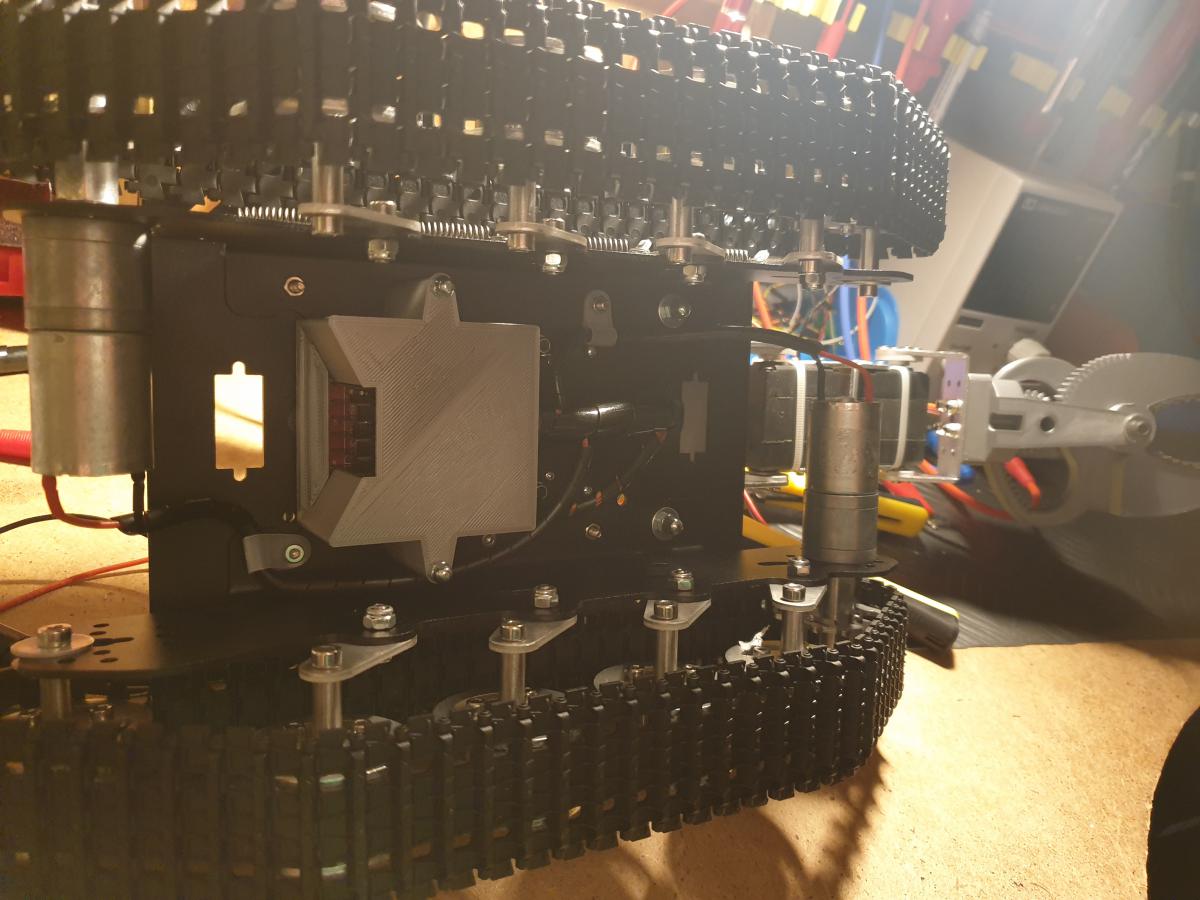
Avancée du robot
Le dessous du char est terminé
Le dessous du char est terminé
Image(s) jointe(s)
#106779 Robot explorateur
Posté par
sur 05 décembre 2019 - 02:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui tu peux sans problème faire un robot de surveillance avec un laser et un distributeur de friandise => Tu peux piloter autant de servo , de relais et de moteur à courant continu supplémentaire que tu veux directement depuis la pi ( en passant par un driver cc pour les moteurs cc
) .
Par contre c'est vrai qu'on ne gère pas encore les moteurs pas à pas ... Mais on vient de publier le code pour communiquer avec une arduino... Donc après avec l'arduino tu peux piloter tout ce que tu veux =) dont le moteur pas à pas.
Tu peux privatiser le robot sans soucis, c'est prévu pour. En gros tu peux décider de le rendre dispo que pour toi et la "white liste" : donc si tu mets ta femme dans la white liste vous serez les seuls à pouvoir accéder au robot =) En plus ce qui est drôle c'est que vous pourrez piloter le robot en même temps ... Genre un qui pilote le lazer pendant que l'autre bouge le robot et envoit les friandises
J'ai juste encore quelques questions...
Il faut juste un pi et une picam pour interphaser avec vigibot ou j'ai besoin d'autre chose de "spécifique " ?
Quel modèle de Pi est optimal ?
Je peux utiliser un accu 12v ou il y a une surveillance de tension qui impose du 5v ?
#106839 Robot explorateur
Posté par
sur 10 décembre 2019 - 01:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je me concentre deja sur l'émetteur car si c'est incorrect le recepteur le sera aussi
Avec ce code je ne sais deja pas comment envoyé l'etat de mon interrupteur sur la telecommande pour piloter le relai sur le robot
En fait A0 devrait donner une indication de direction pour tourner le robot donc agir sur les entrées digitales du driver et A1 servirait d'indication de vitesses pour les moteurs...
#106840 Robot explorateur
Posté par
sur 10 décembre 2019 - 02:16
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai trouvé un exemple tout bête que je comprend bien pour allumer une led via un potar mais comme tout ce que j'ai trouvé on ne commande qu'une seule chose
Mais maintenant comment envoyer plusieurs informations et comment les récupérer et les exploiter ??
Emetteur
#include <SoftwareSerial.h>
SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pin
int pot = A2;
void setup() {
Serial.begin(9600); // Serial port to computer
HC12.begin(9600); // Serial port to HC12
pinMode(pot,INPUT); }
void loop() {
int val = map(analogRead(pot),0,1024,0,255);
HC12.write(val); // Send that data to HC-12 }
Recepteur
#include <SoftwareSerial.h>
SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pin
int LED = 3;
void setup() {
Serial.begin(9600); // Serial port to computer
HC12.begin(9600); // Serial port to HC12
pinMode(LED,OUTPUT); }
void loop() {
while (HC12.available()) { // If HC-12 has data
int val = HC12.read();
Serial.println(HC12.read()); // Send the data to Serial monitor
analogWrite(LED,val); } }
#106872 Robot explorateur
Posté par
sur 11 décembre 2019 - 05:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
dernière astuce, si jamais ton neutre sur ton joystick et pas bien centré ou autre au lieu de faire un simple map tu peux découper en 3 morceaux du genre :
si ta valeur est entre 0 et neutreMin => map( valeur , 0, neutreMin, -255, 0 );
si ta valeur est entre netureMin et neutreMax => 0
si ta valeur est entre neutreMax et 1023 => map( valeur , neutreMax, 1023, 0, 255);
Oui effectivement ces joysticks sont jamais vraiment parfaits... merci du tuyau
#106870 Robot explorateur
Posté par
sur 11 décembre 2019 - 05:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Justement le but c'est de progresser.
Je suis prêt à passer le temps qu'il faudra pour t'aider à comprendre chaque ligne du code que je t'ai proposé si ça t'intéresse =)
On peut discuter ici et à l'oral genre discord si tu connais =)
Par contre pour ce qui est de t'aider pour la vitesse j'ai pas bien compris ton problème.
Tu utilises quoi comme driver ? tu utilises bien des drivers avec deux pins de directon et un pin pwm en plus ?
dans tous les cas je te propose de faire des petites fonction du genre :
void driveRightMotor( int speed ) { // speed compris entre -255 et 255 if(speed > 0 ) { // je fais ce qu'il faut pour que mon moteur droit cherche à faire avancer le robot // exemple : digitalWrite(Dig1_Mot1, LOW); digitalWrite(Dig2_Mot1, HIGH); analogWrite(Pwm_Mot1, speed); } else if(speed < 0 ) { // je fais ce qu'il faut pour que mon moteur droit cherche à faire reculer le robot // exemple : digitalWrite(Dig1_Mot1, HIGH); digitalWrite(Dig2_Mot1, LOW); analogWrite(Pwm_Mot1, -speed); } else { // je stop digitalWrite(Dig1_Mot1, LOW); digitalWrite(Dig2_Mot1, LOW); analogWrite(Pwm_Mot1, 0); } }faudra ajuster en fonction de ton driver et de ton câblage mais quand ça marche pour le moteur droit tu fais pareil la fonction avec le moteur gauche puis comme ça on peut faire une fonction du genre :
void drive2WDrobot(int linearspeed, int angularspeed) { // avec linearspeed et angularspeed compris entre -255 et 255 int rightspeed = constrain(linearspeed - angularspeed, -255, 255); int leftspeed = constrain(linearspeed + angularspeed, -255, 255); driveRightMotor( rightspeed ); driveLeftMotor( leftspeed );}et pour obtenir tes vitesse de consigne linéaire et angulaire tu fais ton map entre de ton entré qui va de 0 et 1023 pour que ça sorte en -255 255 =)
Cool j'avais pas pensé à faire un mapping avec du négatif ca résout bien mon problème...
Oui je veux bien comprendre le code que tu m'a partagé je vais déjà bosser dessus de mon coté et après je viendrai vers toi pour approfondir merci
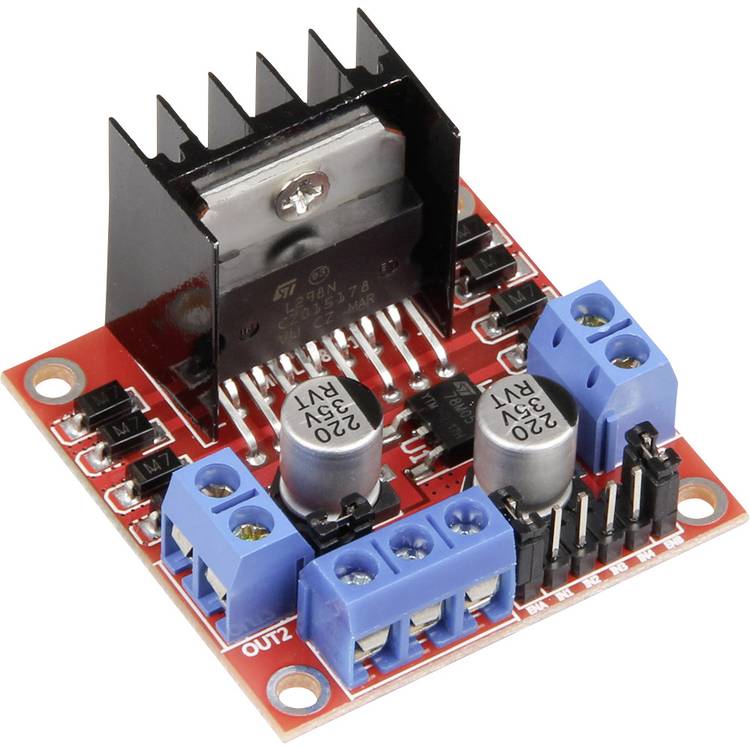
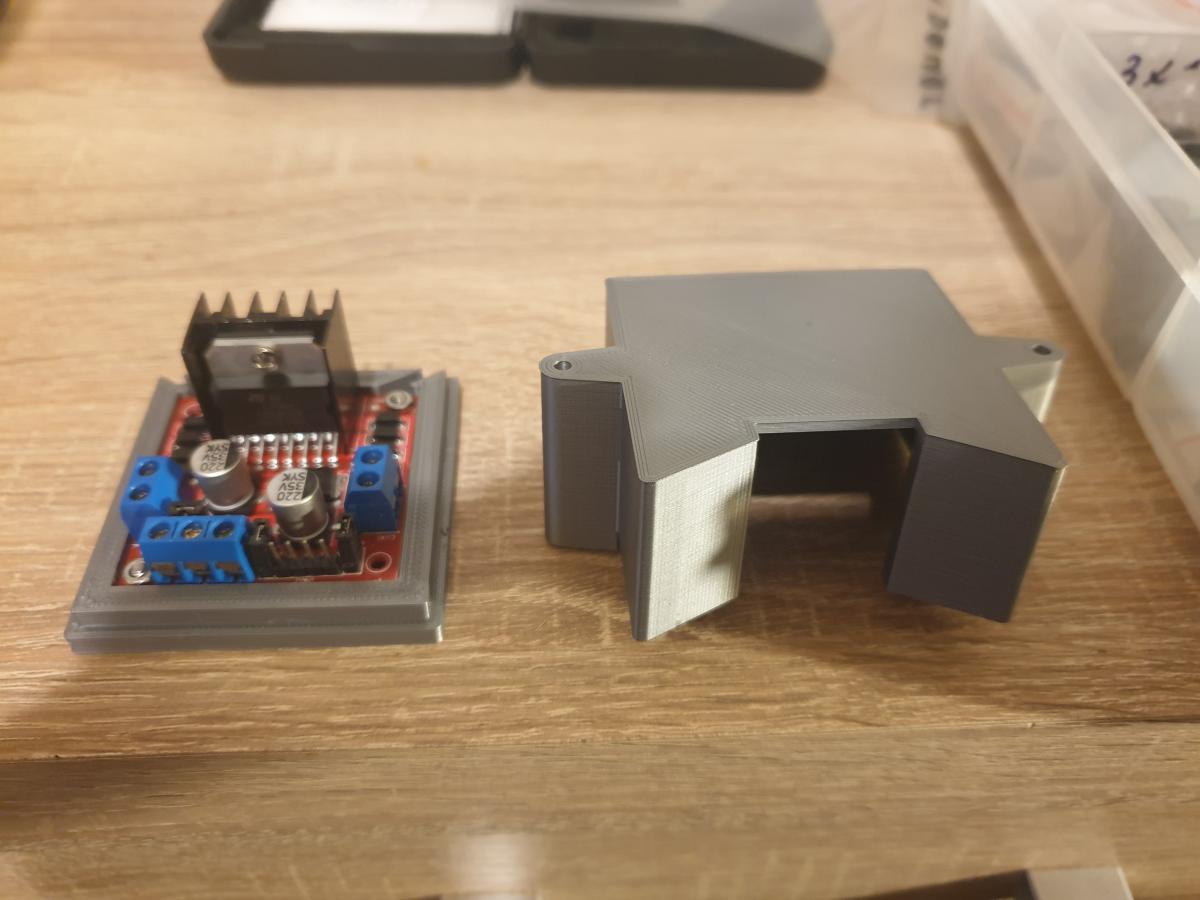
Oui j'utilise bien ce genre de driver avec 1x pwm et 2x digital
Image(s) jointe(s)
#106868 Robot explorateur
Posté par
sur 11 décembre 2019 - 01:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai trouvé une méthode plus adaptée à mon niveau...
J'espère qu'elle fonctionne
Apparemment l'émetteur envoie les infos sur une ligne en les séparant par une virgule et le récepteur récupère ces données et les rend à nouveau indépendantes
Qu'en pensez vous ??
J'aurais également besoin d'astuces pour le pilotage des moteurs
Je n'ai pas de problème avec les entrées digitales du driver c'est simplement pour l'activation et donc le sens de rotation des moteurs par contre pour la vitesse c'est une autre affaire
Par exemple, pour reculer le robot... Quand mon joystick est au centre il renvoie environ 512 si je tire en arriere disons vers la valeur 100 j'aimerais que le robot recule quasi à fond mais du coup la valeure est faible et il reculera tout doucement... Il y a aussi une histoire de mappage je dois passer de 0-1024 à 0-255...
Voici mon code temporaire
//Code de l'émetteur ( Arduino UNO + HC12 + 1x Joystick + 5x Potentiometre + 1x Bouton on/off )
#include <SoftwareSerial.h>
#include <Wire.h>
SoftwareSerial HC12(10, 11);
int Gaz = A0;
int Direction = A1;
int Cam1 = A2;
int Cam2 = A3;
int Pince1 = A4;
int Pince2 = A5;
int Pince3 = A6;
int Phare = 2;
void setup()
{
HC12.begin(9600);
Serial.begin(9600);
pinMode(A0, INPUT);
pinMode(A1, INPUT);
pinMode(A2, INPUT);
pinMode(A3, INPUT);
pinMode(A4, INPUT);
pinMode(A5, INPUT);
pinMode(A6, INPUT);
pinMode(2, INPUT);
}
void loop()
{
Gaz = analogRead(A0);
Direction = analogRead(A1);
Cam1 = analogRead(A2);
Cam2 = analogRead(A3);
Pince1 = analogRead(A4);
Pince2 = analogRead(A5);
Pince3 = analogRead(A6);
Phare = digitalRead(2);
HC12.print(Gaz);
HC12.print(",");
HC12.print(Direction);
HC12.print(",");
HC12.print(Cam1);
HC12.print(",");
HC12.print(Cam2);
HC12.print(",");
HC12.print(Pince1);
HC12.println("");
HC12.print(Pince2);
HC12.print(",");
HC12.print(Pince3);
HC12.print(",");
HC12.print(Phare);
HC12.print(",");
delay(100);
}
//Code du récepteur ( Arduino Mega + HC12 + 5x Servo + 1x L298D avec 2 moteurs 12V DC + 1 relai )
#include <SoftwareSerial.h>
#include <Wire.h>
#include <Servo.h>
const int Pwm_Mot1 = 1;
const int Dig1_Mot1 = 2;
const int Dig2_Mot1 = 3;
const int Pwm_Mot2 = 4 ;
const int Dig1_Mot2 = 5;
const int Dig2_Mot2 = 6;
const int Relai = 7;
Servo Rotation_Cam;
Servo Inclinaison_Cam;
Servo Bras1_Pince;
Servo Bras2_Pince;
Servo Serrage_Pince;
SoftwareSerial HC12(10, 11);
int Gaz;
int Direction;
int Cam1;
int Cam2;
int Pince1;
int Pince2;
int Pince3;
int Phare;
String input;
int boundLow;
int boundHigh;
const char delimiter = ',';
void setup() {
pinMode(Pwm_Mot1, OUTPUT);
pinMode(Dig1_Mot1, OUTPUT);
pinMode(Dig2_Mot1, OUTPUT);
pinMode(Pwm_Mot2, OUTPUT);
pinMode(Dig1_Mot2, OUTPUT);
pinMode(Dig2_Mot2, OUTPUT);
Rotation_Cam.attach(8);
Inclinaison_Cam.attach(9);
Bras1_Pince.attach(10);
Bras2_Pince.attach(11);
Serrage_Pince.attach(12);
Serial.begin(9600);
HC12.begin(9600);
}
void loop() {
if(HC12.available())
{
input = HC12.readStringUntil('\n');
if (input.length() > 0)
{
Serial.println(input);
boundLow = input.indexOf(delimiter);
Gaz = input.substring(0, boundLow).toInt();
boundHigh = input.indexOf(delimiter, boundLow+1);
Direction = input.substring(boundLow+1, boundHigh).toInt();
boundLow = input.indexOf(delimiter, boundHigh+1);
Cam1 = input.substring(boundHigh+1, boundLow).toInt();
boundHigh = input.indexOf(delimiter, boundLow+1);
Cam2 = input.substring(boundLow+1, boundHigh).toInt();
boundLow = input.indexOf(delimiter, boundHigh+1);
Cam2 = input.substring(boundHigh+1, boundLow).toInt();
boundHigh = input.indexOf(delimiter, boundLow+1);
Pince1 = input.substring(boundLow+1, boundHigh).toInt();
boundLow = input.indexOf(delimiter, boundHigh+1);
Pince2 = input.substring(boundHigh+1, boundLow).toInt();
boundHigh = input.indexOf(delimiter, boundLow+1);
Pince3 = input.substring(boundLow+1, boundHigh).toInt();
Phare = input.substring(boundHigh+1).toInt();
delay(10);
}
Mouvement();
Eclairage();
Bras();
Vision();
}}
void Mouvement()
{
if ((Gaz > 700) && (Direction > 300) && (Direction < 700)) //avancer
{
digitalWrite(Dig1_Mot1, HIGH);
digitalWrite(Dig2_Mot1, LOW);
digitalWrite(Dig1_Mot2, HIGH);
digitalWrite(Dig2_Mot2, LOW);
analogWrite(Pwm_Mot1, Gaz);
analogWrite(Pwm_Mot2, Gaz);
}
else if ((Gaz < 700) && (Direction > 300) && (Direction < 700)) //reculer
{
digitalWrite(Dig1_Mot1, LOW);
digitalWrite(Dig2_Mot1, HIGH);
digitalWrite(Dig1_Mot2, LOW);
digitalWrite(Dig2_Mot2, HIGH);
}
else if () // gauche
{
}
else if () // droite
{
}
else if () // avant gauche
{
}
else if () // avant droite
{
}
else if () // arriere gauche
{
}
else if () // arriere droite
{
}
else //stop
{
digitalWrite(Dig1_Mot1, LOW);
digitalWrite(Dig2_Mot1, LOW);
digitalWrite(Dig1_Mot2, LOW);
digitalWrite(Dig2_Mot2, LOW);
}
}
void Eclairage()
{
}
void Bras()
{
}
void Vision()
{
}
#106842 Robot explorateur
Posté par
sur 10 décembre 2019 - 02:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci pour l'astuce des balises et merci de ton aide je vais bien regarder cela demain
#106778 Robot explorateur
Posté par
sur 05 décembre 2019 - 01:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui tu peux sans problème faire un robot de surveillance avec un laser et un distributeur de friandise => Tu peux piloter autant de servo , de relais et de moteur à courant continu supplémentaire que tu veux directement depuis la pi ( en passant par un driver cc pour les moteurs cc
Par contre c'est vrai qu'on ne gère pas encore les moteurs pas à pas ... Mais on vient de publier le code pour communiquer avec une arduino... Donc après avec l'arduino tu peux piloter tout ce que tu veux =) dont le moteur pas à pas.
Tu peux privatiser le robot sans soucis, c'est prévu pour. En gros tu peux décider de le rendre dispo que pour toi et la "white liste" : donc si tu mets ta femme dans la white liste vous serez les seuls à pouvoir accéder au robot =) En plus ce qui est drôle c'est que vous pourrez piloter le robot en même temps ... Genre un qui pilote le lazer pendant que l'autre bouge le robot et envoit les friandises
C'est génial !
Je vais donc participer aux donnations, commander le matériel dont j'ai besoin et ouvrir un nouveau sujet sur robotmaker pour ce nouveau robot...
Merci
#106776 Robot explorateur
Posté par
sur 05 décembre 2019 - 01:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai modélisé et imprimé des boitiers pour l'arduino mega et le driver l298
Image(s) jointe(s)
#104777 Robot explorateur
Posté par
sur 15 août 2019 - 05:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
En effet il vaut mieux éviter d'avoir deux périphériques UART sur les même pins RX et TX, par contre si tu utilises une arduino mega qui a plusieurs module UART, tu peux contrôler sans problème 4 périphérique UART en même temps chacun sur un des 4 UART différents présents sur l'arduino mega ! =)
Je pourrais utiliser un mega de toute façon ma télécommande sera grande par contre j'ai un petit niveau en programmation le code serai difficile pour moi je pense
#104778 Robot explorateur
Posté par
sur 15 août 2019 - 05:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
A la base je voulais utliliser un raspberry et une Picam pour piloter depuis une page html via un petit serveur le problème c'est que avec ma box je ne peut pas avoir d'adresse ip statique mon fournisseur d'acces ne donnant pas cette option à part aux entreprises. C'est pourquoi je me suis orienté différemment. Mais cela m'embête car à la base c'était pour surveiller la maison et les chats depuis le boulot. Si vous avez une autre idée je suis preneur
#104775 Robot explorateur
Posté par
sur 15 août 2019 - 05:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bon, du coup, probablement pas de conflit.
Si la télécommande sert juste de télécomande et rien d'autres (pas de retour d'information, pas de gros calculs), alors je pense que le softwareSerial ne devrait pas ralentir de manière perceptible la commande.
En revanche, je réinterroge sur un aspect : tu as une caméra sur ton robot, et vue la portée de tes radios, je suppose que tu ne compte pas toujours avoir ton robot juste à coté de toi (donc j'imagine que tu vas utiliser la caméra pour voir le terrain pour le piloter). Du coup, se pose la question suivante : comment compte tu récupérer et afficher la vidéo? Car là, pour le coup, je ne suis pas sur que l'arduino arrive à suivre (pour de la bonne résolution d'image, je suis même sur que non, vue qu'un Arduino Uno n'a que 2ko de Ram, ce qui est insuffisant pour stocker une image de plus de 40*50 pixels)
Pour la video tout est prévu à part avec un émetteur récepteur dédié type drone et un petit lcd sur la télécommande
#104773 Robot explorateur
Posté par
sur 15 août 2019 - 05:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je vai commander le tout nextion et aussi le joystick et les sliders c'est jamais perdu.
Je ferai des essais et je posterai mes observations ici
Je ferai des essais et je posterai mes observations ici
#104772 Robot explorateur
Posté par
sur 15 août 2019 - 05:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Non dans les exemples on emploie pas 0 et 1 plutot de 4 à 10 donc ca doit rester du soft.
Du côté émetteur il y aura un joystick pour les mouvements des chenilles ( avancer reculer gauche droite) et 4 sliders ( j'ai choisi des sliders car ils gardent leur position au repos ), 2 pour les mouvements de la camera ( haut bas gauche droite ) et 2 pour la pince ( haut bas fermeture ouverture ) et enfin un bouton pour le projecteur
Du côté récepteur il y aura un l298 pour 2 moteurs dc 12v, 4 servos et un relai à piloter
Du côté émetteur il y aura un joystick pour les mouvements des chenilles ( avancer reculer gauche droite) et 4 sliders ( j'ai choisi des sliders car ils gardent leur position au repos ), 2 pour les mouvements de la camera ( haut bas gauche droite ) et 2 pour la pince ( haut bas fermeture ouverture ) et enfin un bouton pour le projecteur
Du côté récepteur il y aura un l298 pour 2 moteurs dc 12v, 4 servos et un relai à piloter
#106678 Robot explorateur
Posté par
sur 30 novembre 2019 - 07:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
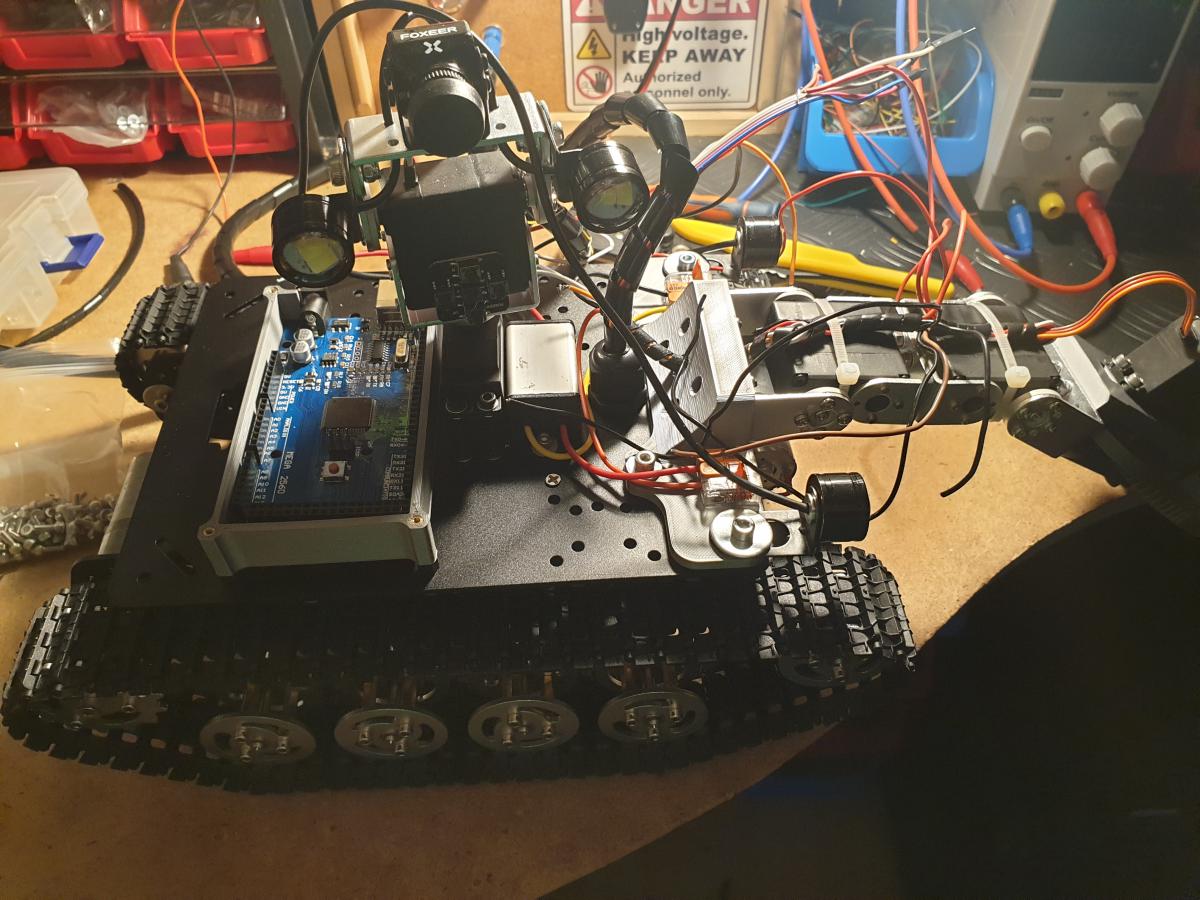
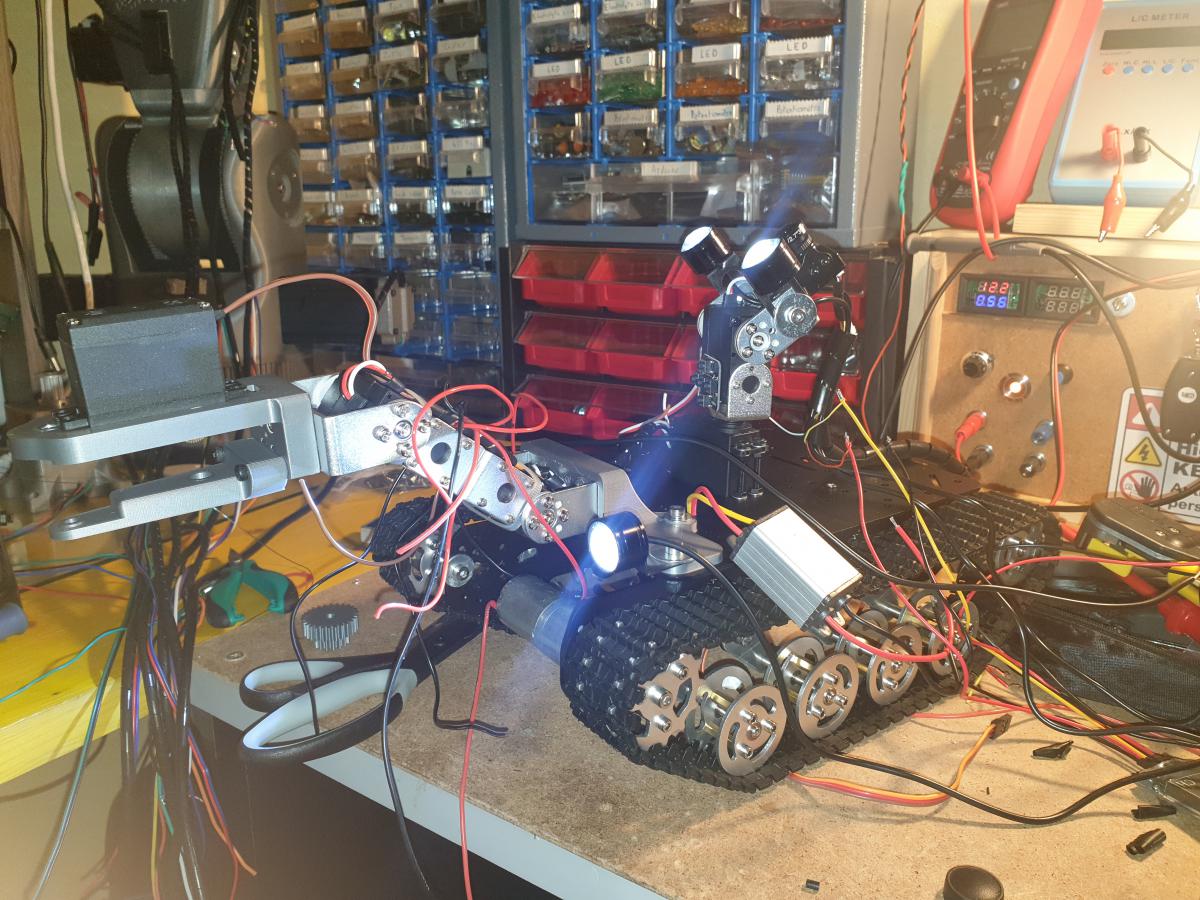
Bonjour bonjour après une pause j'ai sérieusement attaqué la construction du robot
Image(s) jointe(s)
#106680 Robot explorateur
Posté par
sur 30 novembre 2019 - 08:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour Mike
Merci je vais jeter un oeil mais je suis passé sur une camera foxer avec arduino et un emetteur video dédié...
Pour ta proposition je dois switcher pour un Pi et une Picam ??
Merci je vais jeter un oeil mais je suis passé sur une camera foxer avec arduino et un emetteur video dédié...
Pour ta proposition je dois switcher pour un Pi et une Picam ??
#106775 Robot explorateur
Posté par
sur 05 décembre 2019 - 01:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
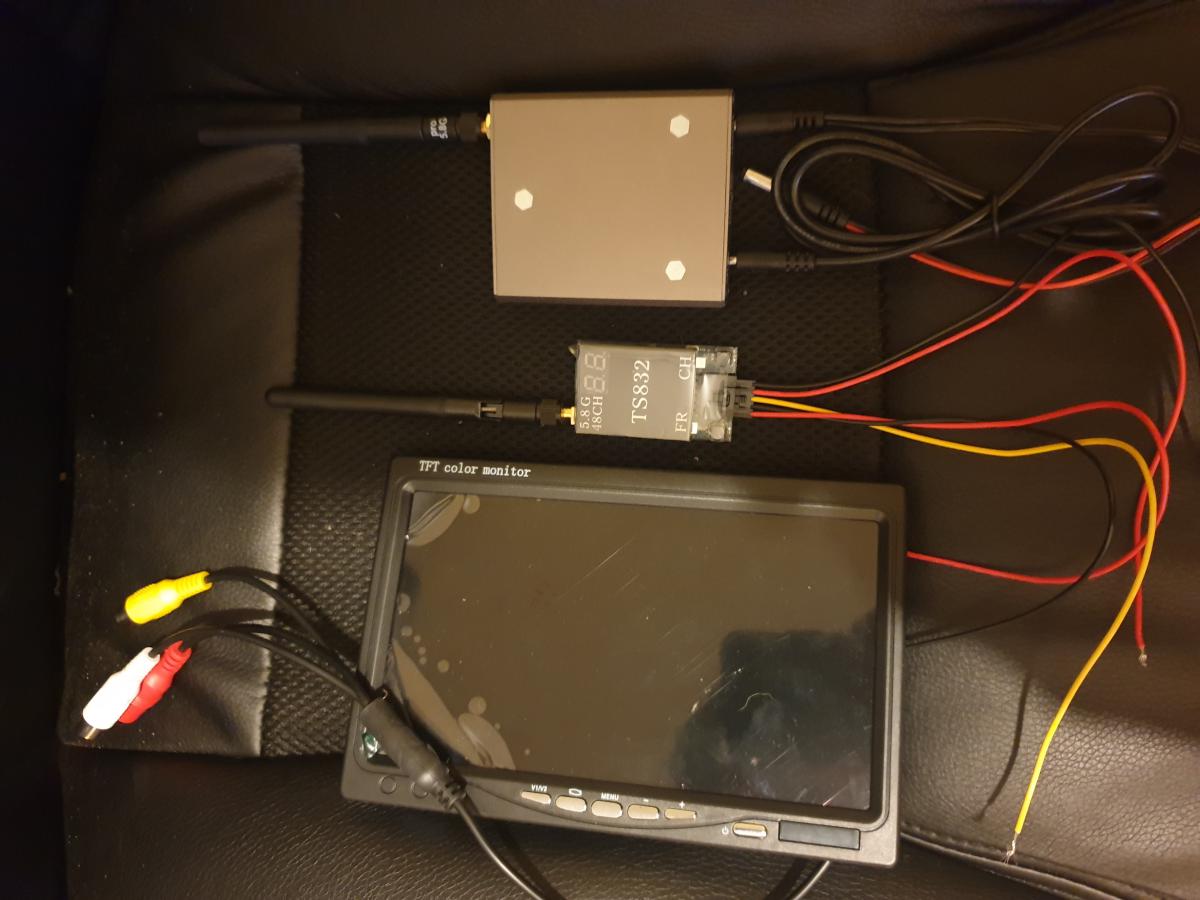
Je suis également curieux d'en savoir plus. En te remerciant d'avance.
J'avais une photo sur mon téléphone
La camera est pas dessus c'est une foxer mini
Je peux te donner les références demain soir si ca interesse
Le matériel fonctionne bien
Image(s) jointe(s)
#106774 Robot explorateur
Posté par
sur 05 décembre 2019 - 12:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
Mince j'ai fais ma proposition un peu tard ...
Oui pour ma proposition le plus simple et le plus économique est d'utiliser une pi + pi cam.
Pas besoin d'avoir une IP fixe , ni d'ouvrir un port c'est la pi sur le robot qui se connecte à vigibot ...
Après c'est une proposition comme une autre si tu as déjà une solution qui fonctionne c'est bon =)
Je sais pas si tu as vu mais si tu veux nous soutenir on est en ce moment sur kickstarter : https://www.kickstar...or-live-robots/
C'est quand même trop attirant...
J'ai un chassis à chenille en plus et je suis intéressé pour le monter en raspberry avec picam.
Je voudrais faire un robot de surveillance pour la maison avec un laser et un distributeur de friandise pour le chat...
C'est possible de piloter des servos supplémentaires, des relais, des moteurs pas a pas ou a courant continu sur vigibot ?
C'est uniquement en communauté ou il y aurait moyen de privatiser le robot pour ma femme et moi uniquement ?
#106773 Robot explorateur
Posté par
sur 05 décembre 2019 - 12:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux indiquer ce que tu as utilisé comme matériel pour la vidéo ?
Je ne suis pas chez moi je vous donne les infos demain soir
#106681 Robot explorateur
Posté par
sur 30 novembre 2019 - 08:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Votre travail sur Vigibot est impressionnant bravo
#104770 Robot explorateur
Posté par
sur 15 août 2019 - 05:06
dans
Robots roulants, chars à chenilles et autres machines sur roues
Apparemment on connecte les pin RX TX du hc12 sur des DigitalPin de l'arduino. Du coup les RX TX de l'arduino sont disponibles pour le nextion. Par contre on utilise la bibliothèque SoftwareSerial pour le code du hc12. C'est la que je me demande si il y aura conflit




