Posté par
Posté par
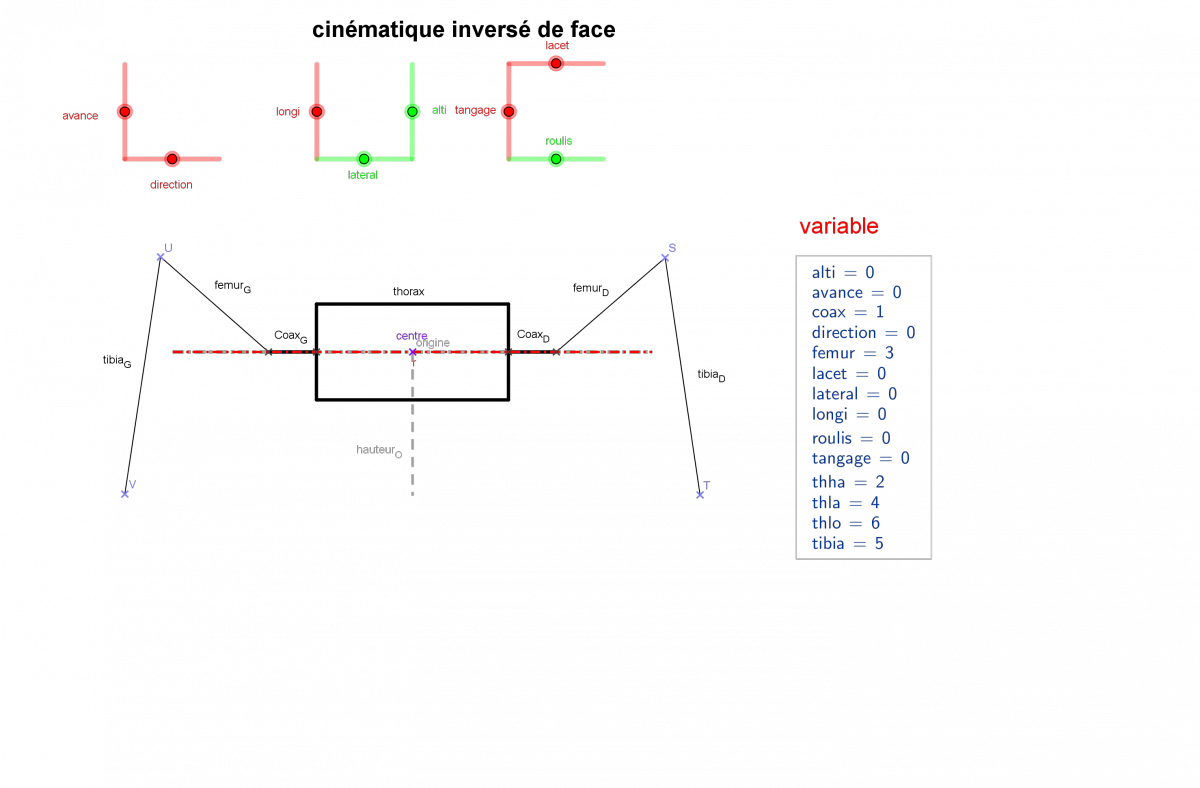
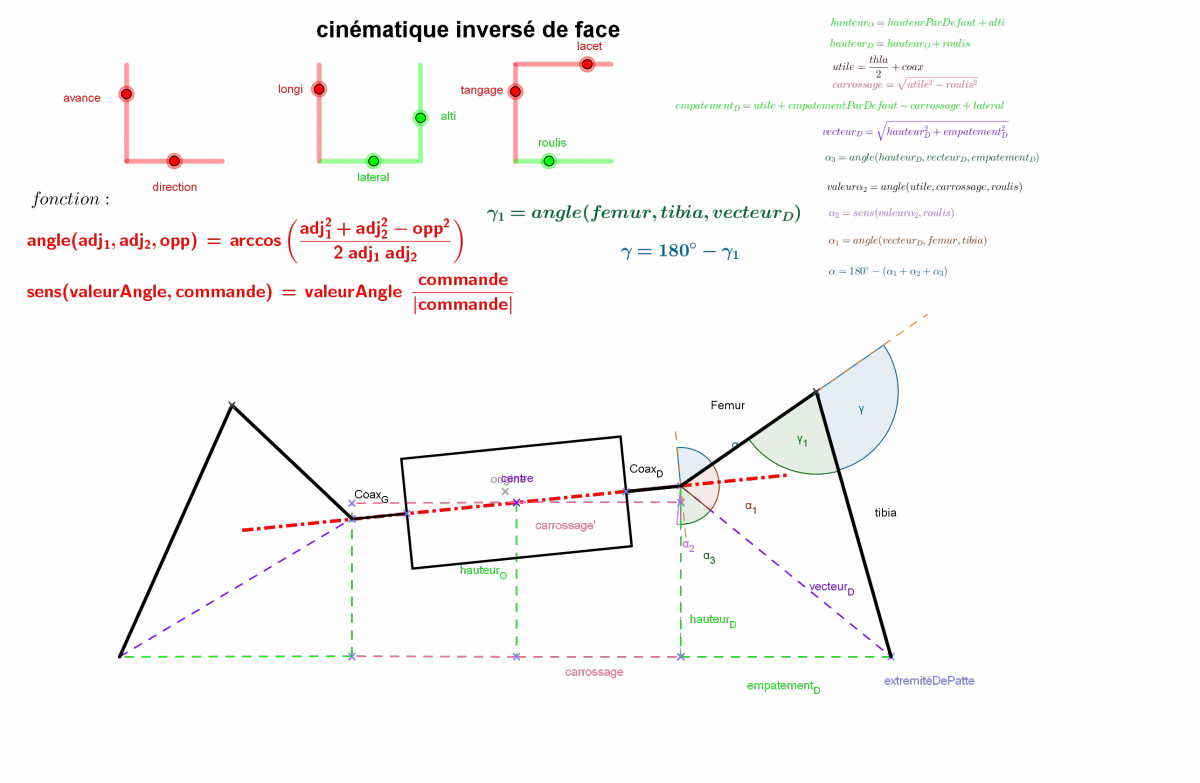
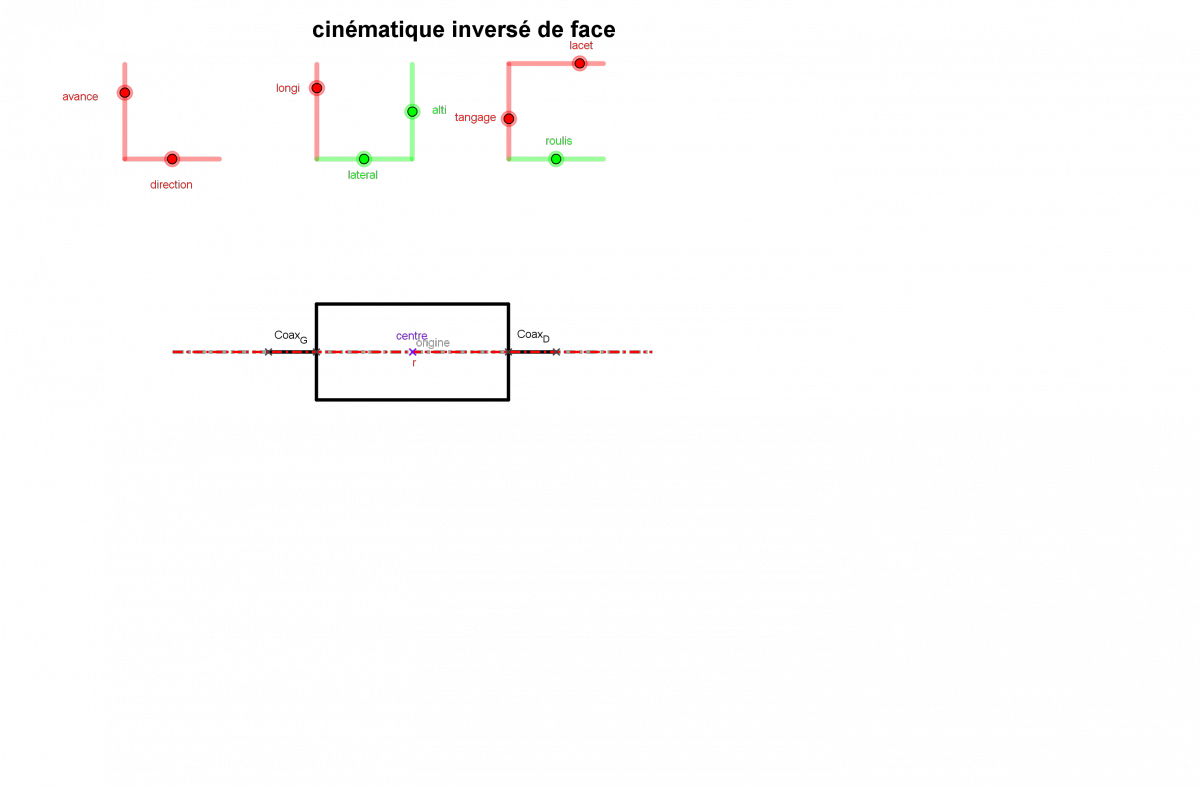
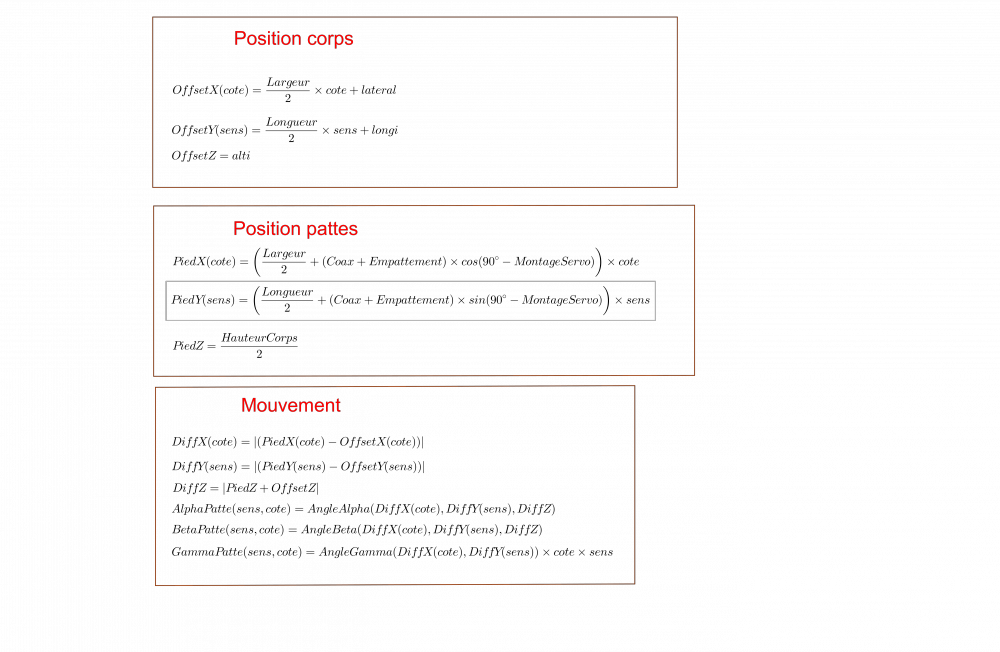
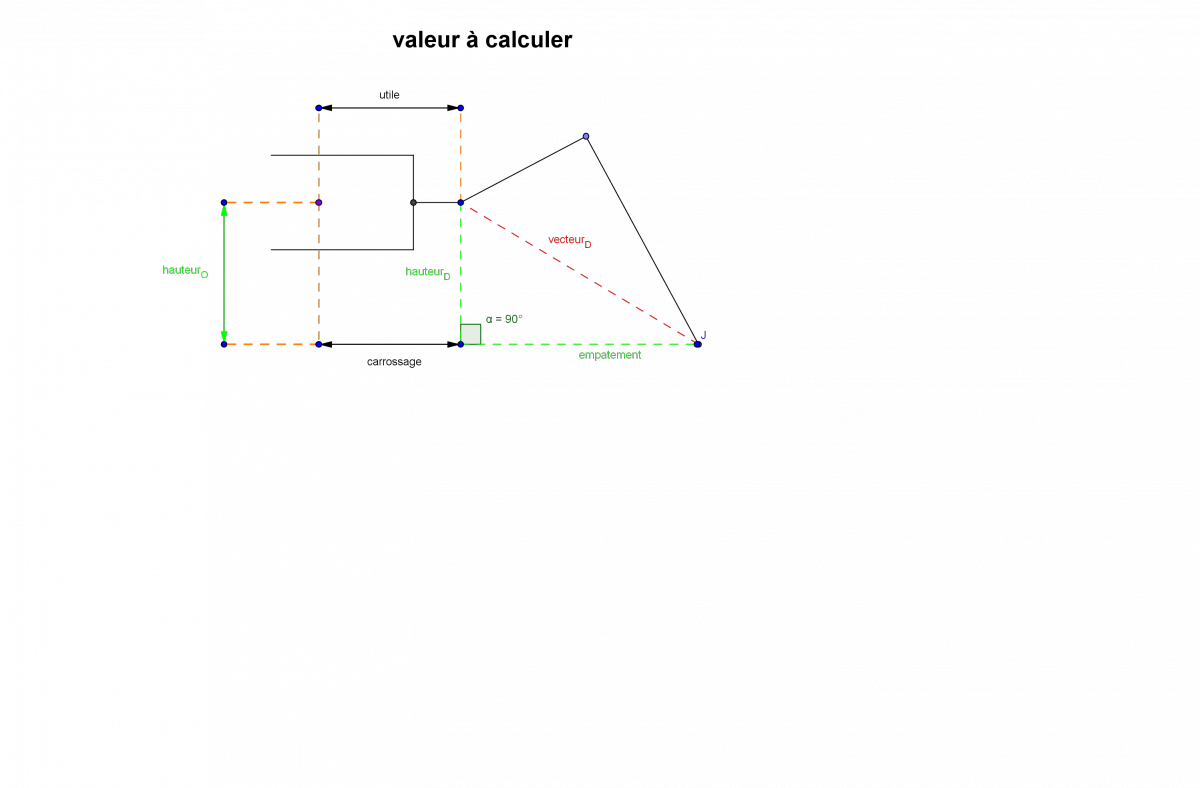
Les valeurs manquante avant le calcul des angle de servo :
j ai déjà définis une hauteur par défaut =3 et je vais définir un empattement par défaut, j ai trouvé que (fémur+tibia)/2=4 était parfait.
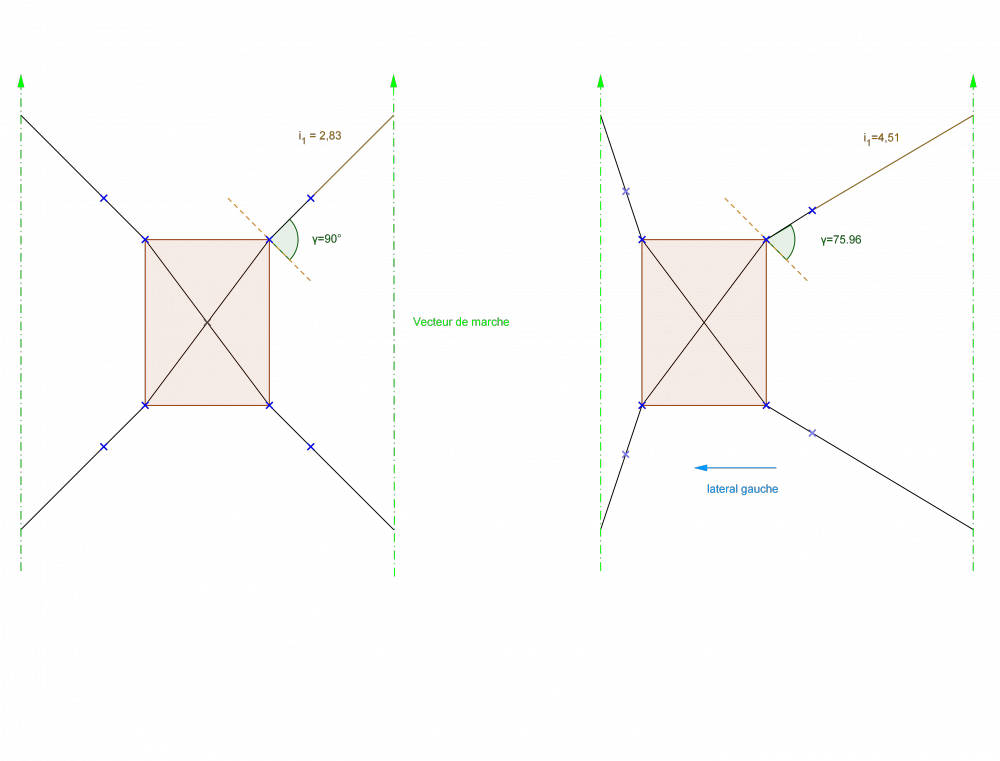
les valeur "utile" et "carrossage" vont me servir a corriger la modification induite par le roulis sur l'empattement.Ce principe devra etre mis en oeuvre pour chaque axe(je compléterais les équation par la suite).
Les hauteur sont facile a trouver:
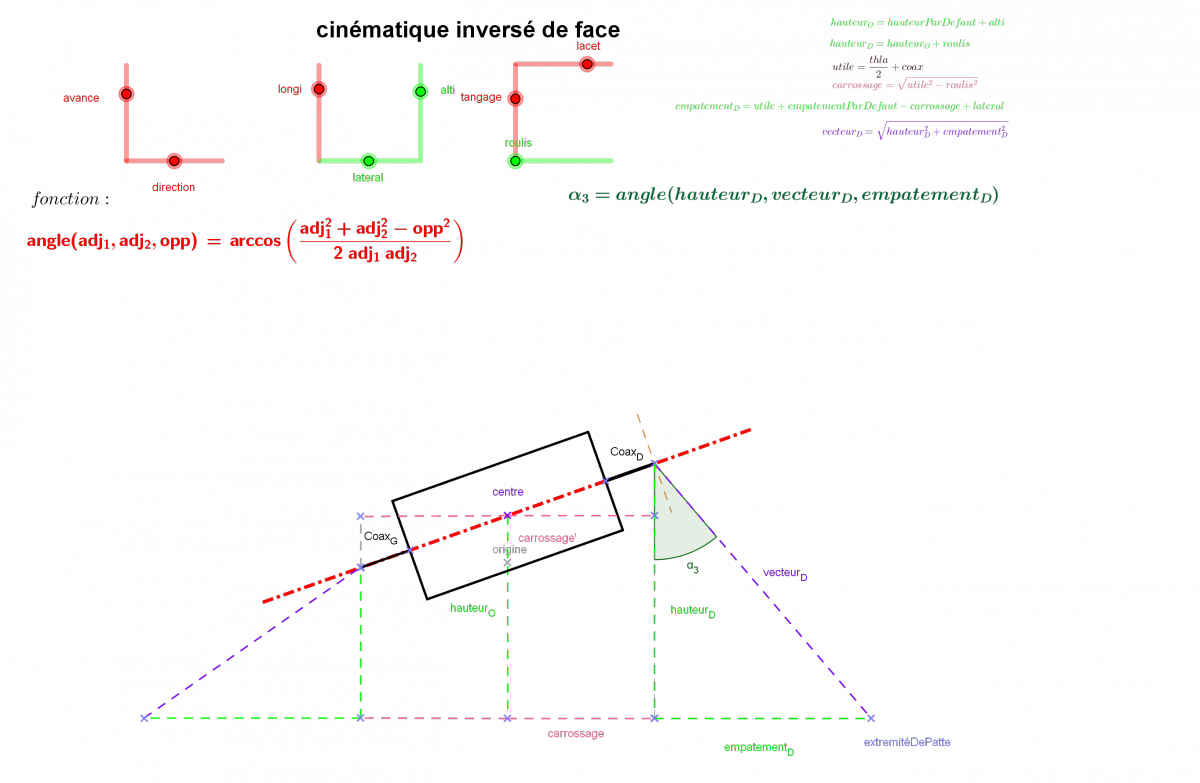
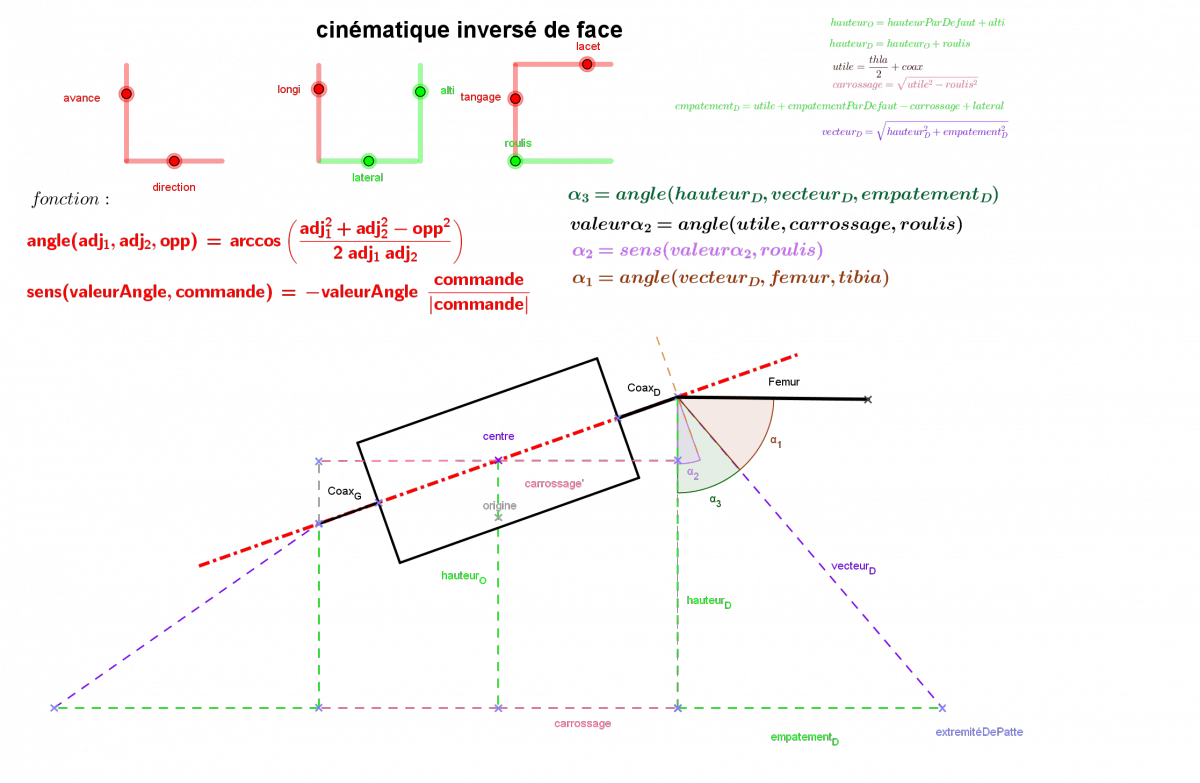
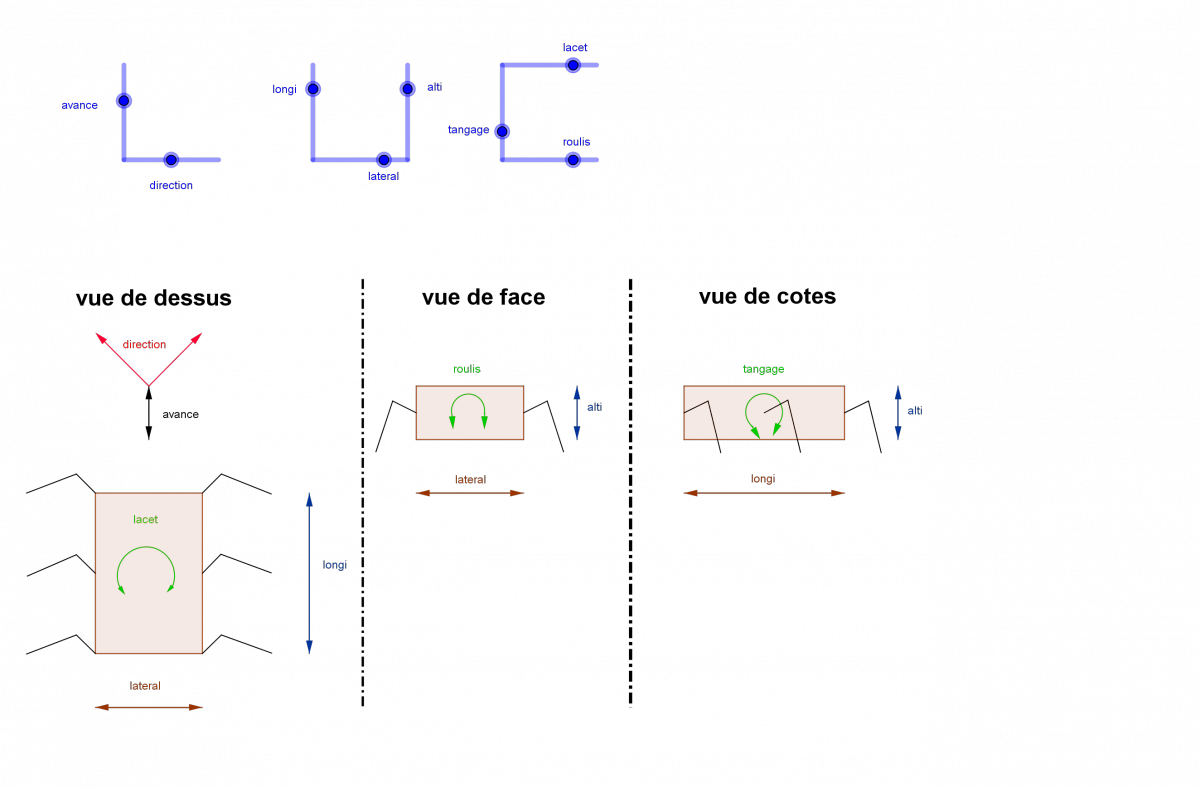
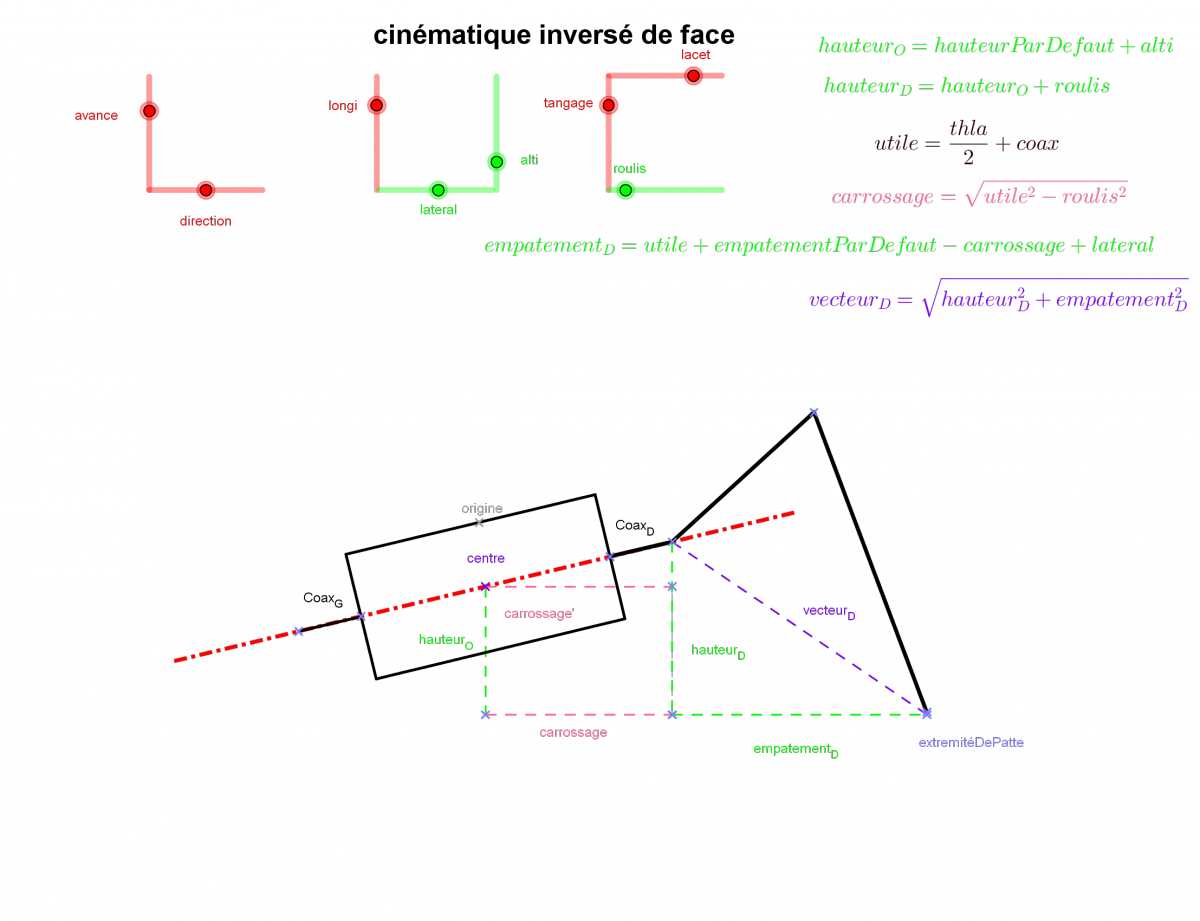
hauteur_O=hauteurParDefaut+alti
hauteur_D=hauteur_O+roulis
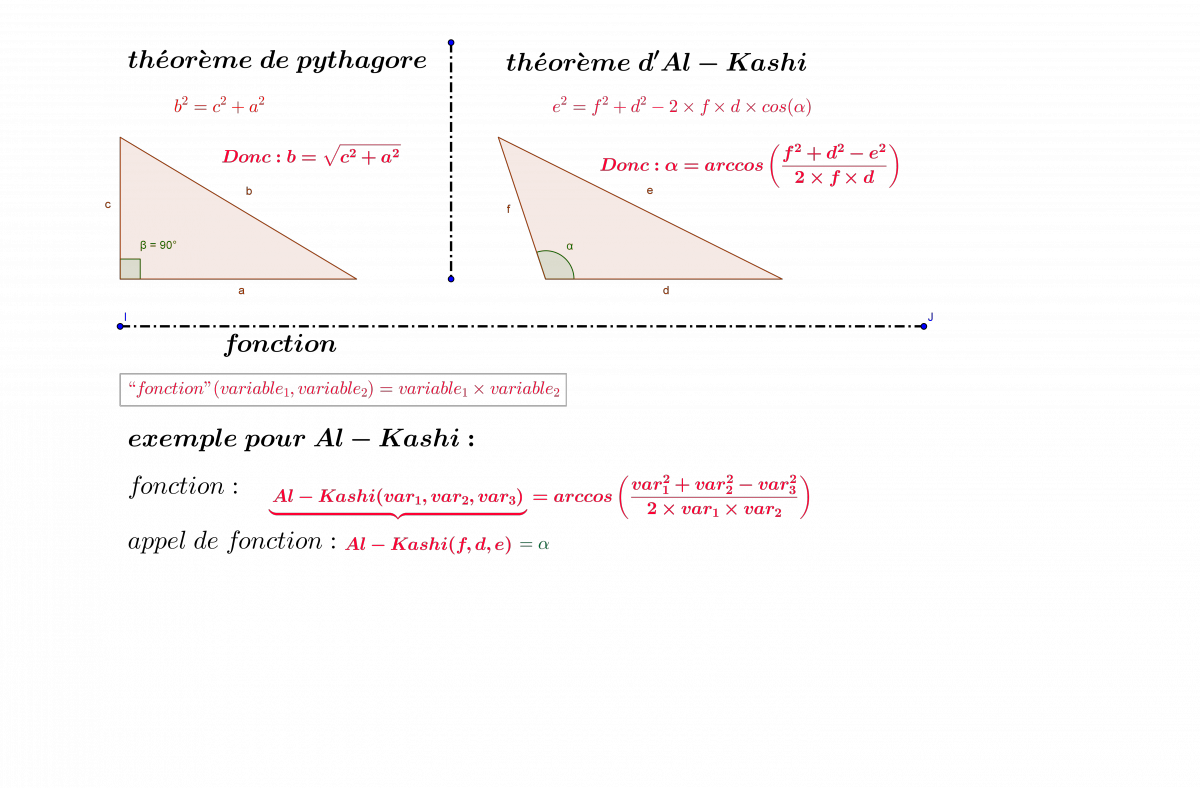
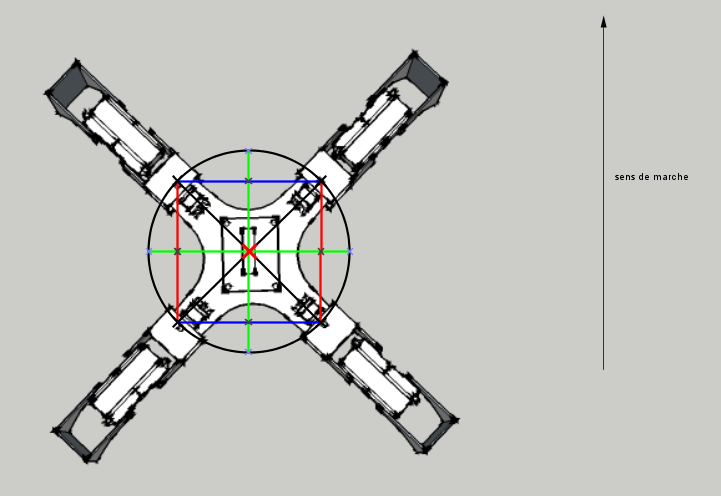
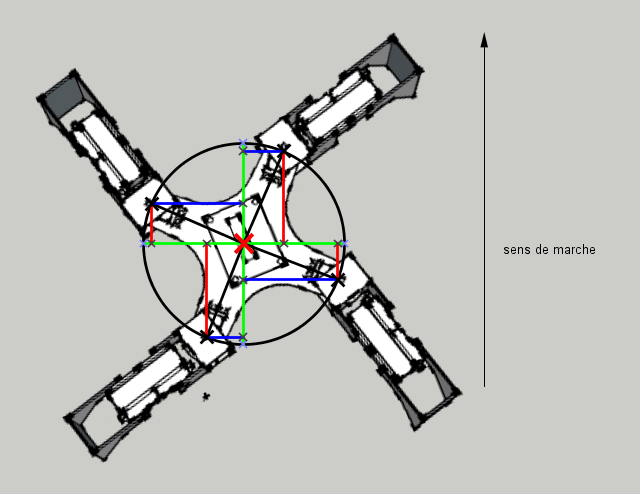
mais vous remarquerez ,sur la vu dynamique ci-dessous, que le roulis entraîne des parasites sur la position de l’extrémité de la patte.Je vais résoudre ce petit soucis avec pythagore.
calcul de l'empatement_D:
distance réel, du centre de gravite => axe fémur:
utile= thla/2+coax
distance du centre de gravite => aplomb axe femur
carrossage=sqrt(utile²-roulis²)
empatement_D=utile+empatementParDefaut-carrossage+lateral
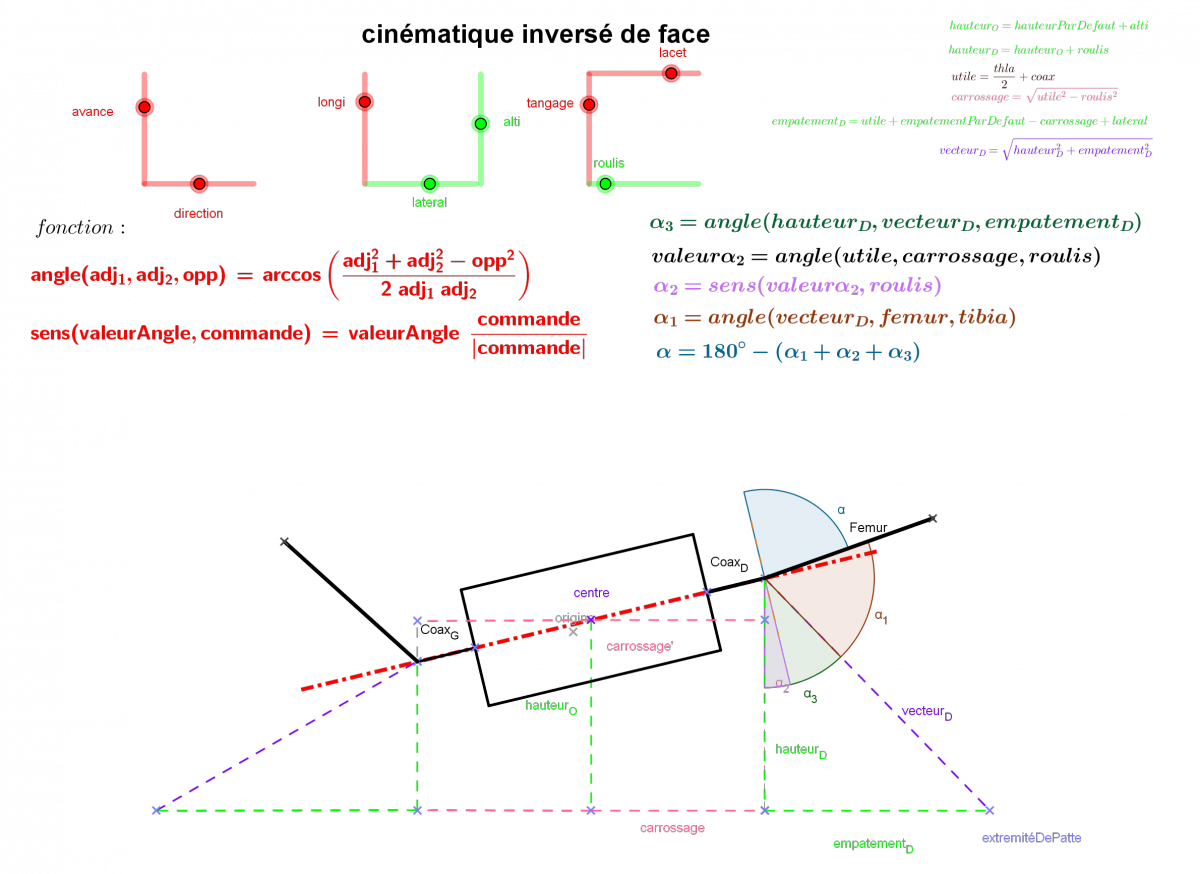
et voila c'est réglé:
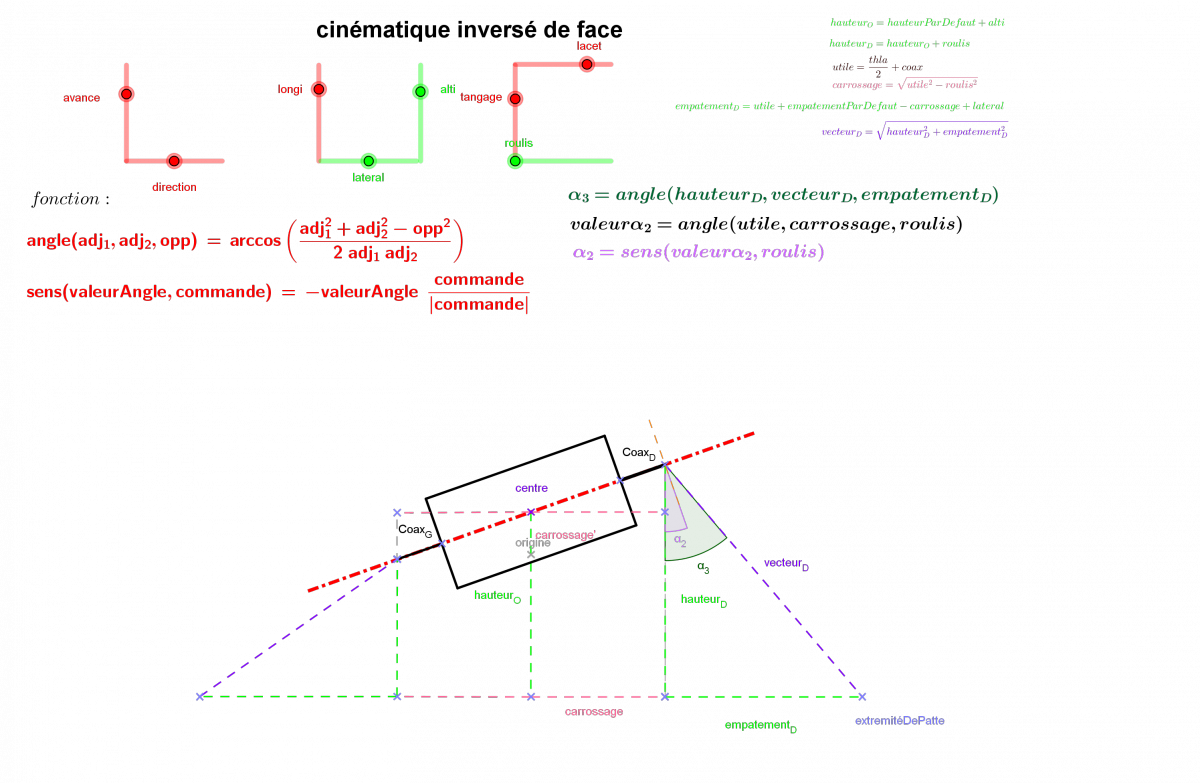
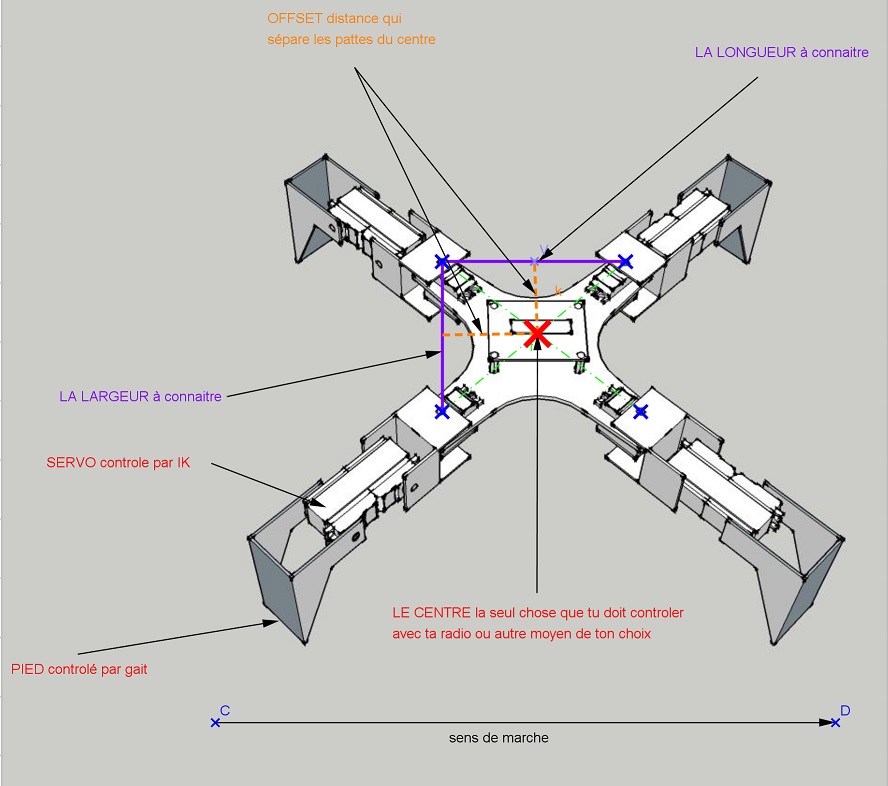
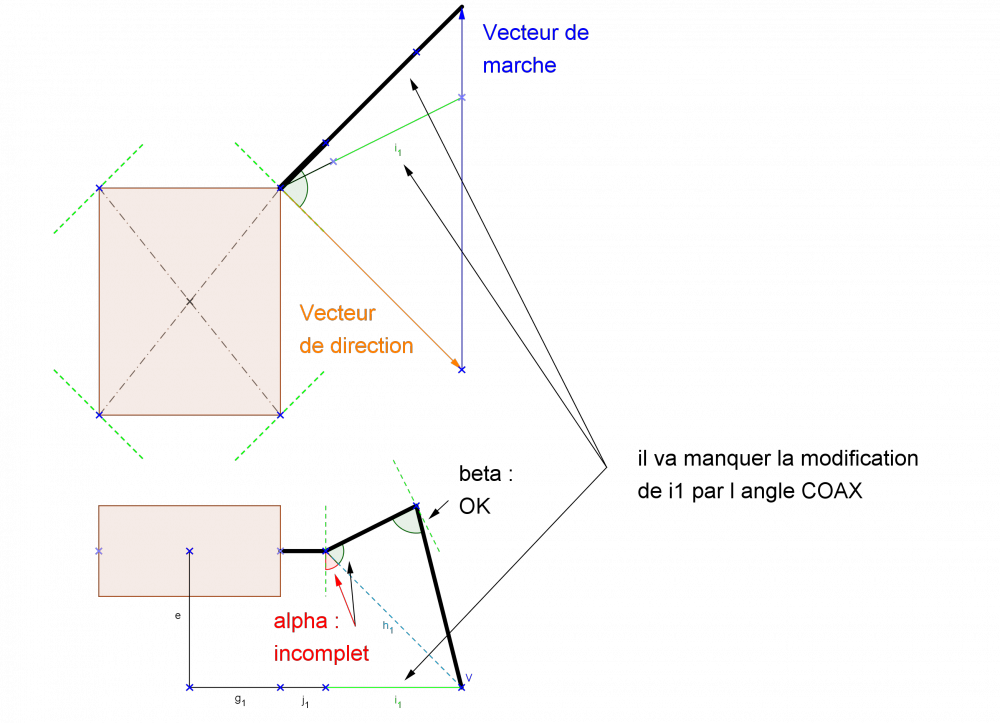
Les hauteurs sont défini, l’empattement aussi.Il me manque le vecteur de la patte:
vecteur_D=sqrt(empatement_D²+hauteur_D²)
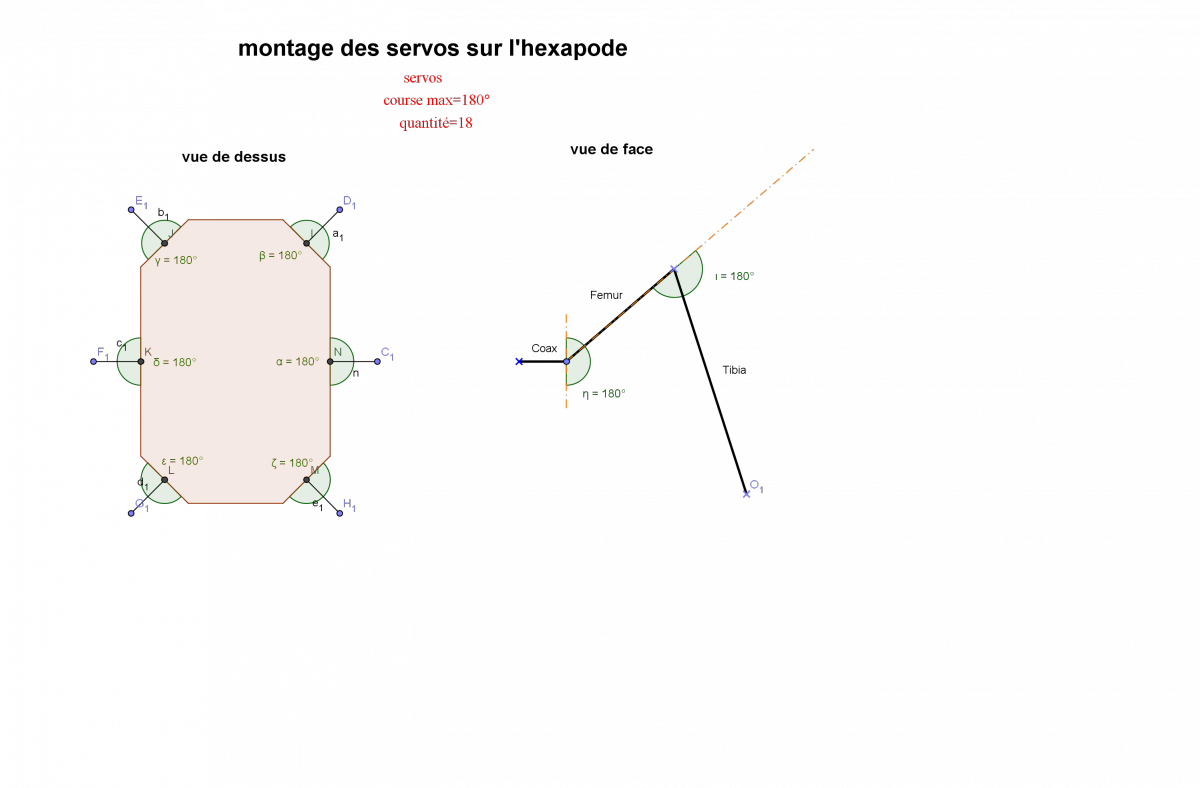
me voila avec tout mes triangle, y a plus qu'a trouver les angles de servo pour mettre cette premiere patte en route. Suivis de quelque fonction pour la distribution à travers les 6 pattes  )
)