Posté par
Posté par
Hello, voici un petit update :
Je travaille sur les mouvements
- marche avant
- rotation à droite
- rotation à gauche
J'ai pas mal travaillé le programme pour que ces mouvements puissent s'enchainer de façon fluide et continue.
Voici une petite vidéo de "mise en situation" ! je déclenche les mouvements à distance grâce au module bluetooth et l'appli Android.
Pour l'instant j'utilise encore l'appli Android de base fournie par Adafruit qui permet de saisir des caractères et j'ai associé ces caractères aux différents mouvements dans le programme chargé sur l'AT Mega... Je m'attaquerai au développement d'une appli sur-mesure après.
Par contre j'ai un souci au niveau des fixations des servos. Après une petite promenade du robot, la plupart des vis sont desserrées.
Est-ce que vous avez une astuce pour que les vis ne tournent pas ? je me demande si enrouler le filetage avec du teflon pourrait faire...






 )
)







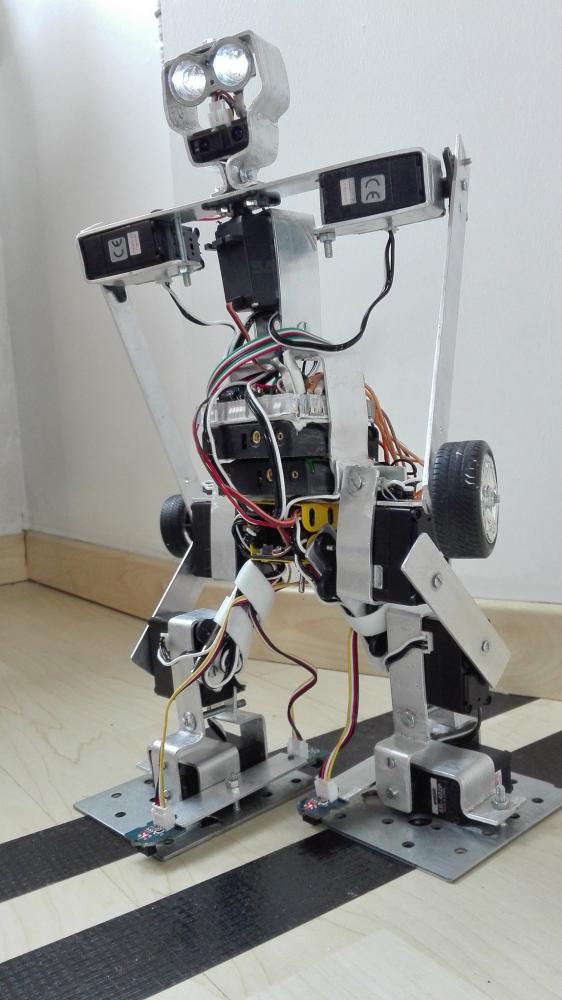
 et 1 capteur de distance IR pour un éventuel combat en "totale autonomie"
et 1 capteur de distance IR pour un éventuel combat en "totale autonomie"