Y a forcément du Lidar dedans
Il y a 368 élément(s) pour gerardosamara (recherche limitée depuis 29-mai 13)
 Posté par
sur 15 août 2018 - 07:18
dans
Général
Posté par
sur 15 août 2018 - 07:18
dans
Général
Y a forcément du Lidar dedans
Posté par
sur 15 juin 2018 - 01:10
dans
Général
Pour @levend qui fait ( je pense ) un robot tracteur de caravane
Posté par
sur 17 novembre 2018 - 04:32
dans
Général
Idée de CNC
Posté par
sur 28 décembre 2018 - 01:59
dans
Général
Posté par
sur 02 juillet 2018 - 03:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 18 octobre 2017 - 09:35
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
@Oliver17 ,
Il y a une librairie python "serial" au niveau du RPI pour dialoguer en USB avec l'arduino
Posté par
sur 23 novembre 2016 - 07:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu pourrais regarder du coté du logiciel gratuit RECUVA et voir si ca convient à ta problématique de récupération de fichiers
Posté par
sur 18 mai 2017 - 05:18
dans
Impression 3D et Imprimantes 3D
@Oracid,
Serait'il possible de faire un résumé de la solution retenu dans le post #1 pour en avoir une synthèse et pour trouver une réponse afin d'éviter de parcourir tous les posts .... par exemple je voulais savoir quel Arduino était retenu par rapport au post de levend au-dessus.
Mais c'est du boulot en plus !
Posté par
sur 18 février 2017 - 10:07
dans
Impression 3D et Imprimantes 3D
Bonjour ,
Je viens de voir ce sujet collaboratif super intéressant .
Merci @Oracid pour l'initiative .
Je vais le suivre au moins dans un premier temps pour m'informer sur la techno imprimande 3D
Bonne continuation à tous
Posté par
sur 06 mai 2016 - 03:18
dans
Apérobots et autres rencontres IRL
Posté par
sur 02 novembre 2018 - 06:32
dans
Apérobots et autres rencontres IRL
+ up sur post #86
A coté de la liste des membres par ex
Posté par
sur 01 juillet 2018 - 04:26
dans
Apérobots et autres rencontres IRL
Je viens de m'ajouter.
Ce serait bien de pouvoir avoir un lien sur le forum vers cette carte de membres
Edit : Seulement 3 membres à priori hors France Metropole: Telson , R1D1 et moi
Posté par
sur 02 novembre 2018 - 06:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Finalement j'ai changé la carte SD et la carte RPI3B par une RPI3B+ que j'avais en stock.
Pour ma mémoire si il y a une prochaine fois : Ré-Installation Raspbian Strech + configuration Rover1sur RPi 3
- Télécharger Raspbian Stretch et copier sur une carte SD 8GO avec Win32DiskImager (+ fichier ssh file pour activation SSH et fichier wpa_supplicant.conf pour configuration Wifi)
- Booter le Rpi3 and login via Putty + sudo raspi-config ( add Camera +VNC server, expand root file system, timezone GMT-6) + IP fixe dans /etc/dhcpcd.conf .
- Mettre à jour Stretch : sudo apt-get update , sudo apt-get upgrade
- Restaurer les fichiers Rpi python et sketches arduino du robot
- Connexion au RPI par le client VNC viewer
- Installer l' IDE Arduino 1.8.7 (Zip)
- Installer les bibilothèques NewPing , TimerOne and Pid
- Configurer la caméra PI V2
- Installer et configurer "motion" sur le RPI3
Posté par
sur 29 juin 2017 - 04:54
dans
Robots roulants, chars à chenilles et autres machines sur roues
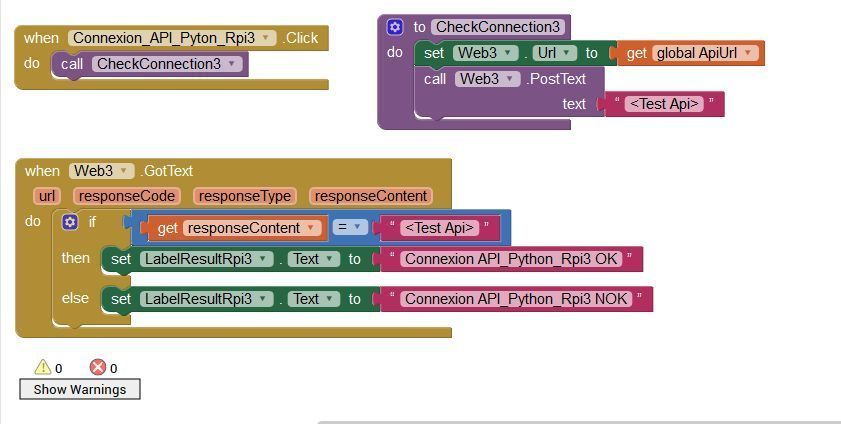
Pour le test de la mini API entre le Rpi3 et l'app Android pour la transmission des commands du robot ( AV AR ... ) :
- un ajout de blocks dans l'app android inventor2 pour le test de l'API ( message <TestApi> envoyé suite click du bouton "Connexion API Rpi3" et attente réception message <Test Api> par l'app android
- un script python est lancé sur le Rpi pour les échanges Rpi3 <-> App android

#!/usr/bin/python3.4
# coding: utf-8 # -*-coding:Utf-8 -*
import socket
host = ''
port = 8481
connexion_server = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
connexion_server.bind((host, port))
connexion_server.listen(5)
print("Le serveur écoute à présent sur le port {}".format(port))
connexion_client, infos_connexion = connexion_server.accept()
print(infos_connexion)
msg_recu = b""
while msg_recu != b"Stop":
msg_recu = connexion_client.recv(1024)
if msg_recu:
# L'instruction ci-dessous peut lever une exception si le message
# Réceptionné comporte des accents
print(msg_recu.decode())
connexion_client.send(b"<Test Api>")
print("Reponse <Test Api>")
print(infos_connexion)
print("Fermeture de la connexion")
connexion_client.close()
connexion_server.close()
Posté par
sur 18 mai 2017 - 10:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
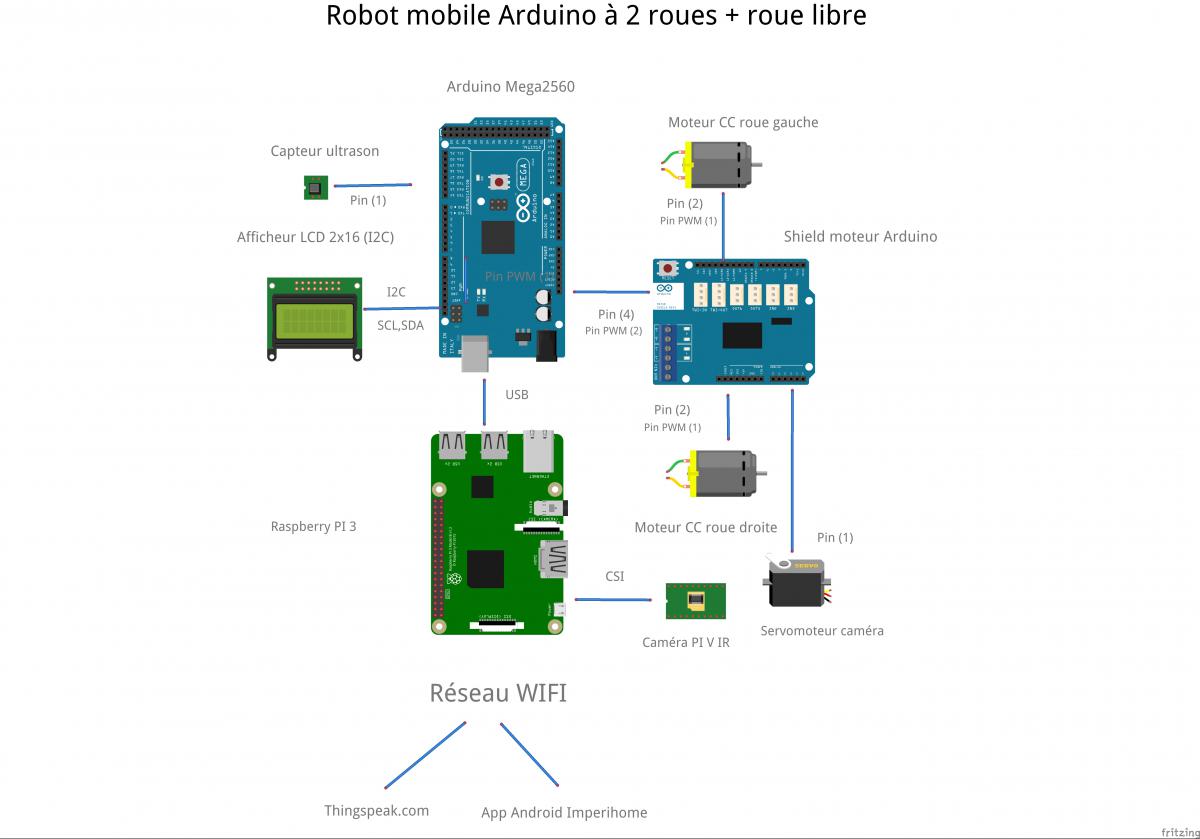
Mise à jour du plan architecture pour l'introduction du Raspberry PI3 comme module Wifi en remplacement de l'ESP8266 et remplacement de la caméra IP existante par la caméra PI V2 IR .
Posté par
sur 12 avril 2016 - 06:07
dans
Robots roulants, chars à chenilles et autres machines sur roues

Posté par
sur 05 février 2019 - 11:40
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voila j'ai remplacé le shield driver moteur Arduino et le robot fonctionne normalement ( Avance et Recule ) avec la fomction PID désactivée .
La lecture des encodeurs fonctionne aussi correctement lorsque je fais tourner à la main les roues en avant et en arrière .
=> La plateforme matérielle fonctionne de nouveau
=> Et donc retour sur la fonction PID ....
<EncodA = 0.00 , EncodB = -124.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> // En AR moteur droit <EncodA = 0.00 , EncodB = -152.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> <EncodA = 0.00 , EncodB = 234.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> // En AV moteur droit <EncodA = 0.00 , EncodB = 116.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> <EncodA = -214.00 , EncodB = 0.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> // En AR moteur gauche <EncodA = -31.00 , EncodB = 0.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> <EncodA = 139.00 , EncodB = 0.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00> // En AV moteur gauche <EncodA = 153.00 , EncodB = 0.00>< Courant moteur A = 15.00 , Courant moteur B = 15.00>
Posté par
sur 12 octobre 2018 - 06:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci @Oracid & @Mike118 pour vos retours d'expérience .
Avec la bibliothèque "newping" ca va beaucoup mieux .
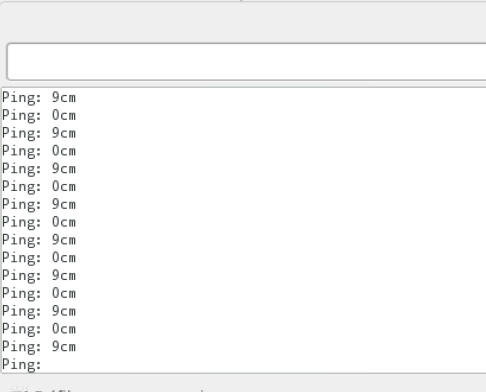
Néanmoins il y a des cas ou la détection d'obstacle est perturbée si le support de réflexion est un angle ou si il est fait de "fibres tréssé" ( salon extérieur) ou non plein comme une balustrade.
Le phénomène semble plus accentué si la distance augmente.
Je ne sais pas si le bruit des vagues qui sont à 50m peut également perturber la transmission de l'ultrason.
La photo ci-dessous est un cas de problème d'angle de réflexion du signal , avec moins d'angle ca marche.

EDIT : Oubli d'indiquer qu'une mesure erronée "8 cm" vient après le "0 cm" en cas de de distance > seuil de détection
Posté par
sur 01 juin 2016 - 08:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci pour la proposition qui est certainement une bonne solution ... que je garde à l'esprit ..
Je ne pensais pas utiliser des encodeurs pour ce 1er robot mobile et utiliser seulement la fonction de mesure du courant consommé par les moteurs disponible au niveau du shield Motor Arduino .
Cela indiquera au moins que le robot a démarré ou est arreté , en complément du retour vidéo.
Posté par
sur 20 octobre 2016 - 02:40
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ca y est , le train avant est assemblé , la plateforme sera surélevée par rapport à l'axe des roues ... pour que le chassis ne reste pas coincé entre les axes de roues AV et la roue folle AR .
Le problème à résoudre a été de fixer les motors à l'intérieur du coude PVC .. la solution a été d'enrouler autour du bloc moteur de l'adhésif pour pouvoir le sertir .
Ensuite restera à assembler le reste du chassis.
Posté par
sur 06 janvier 2018 - 05:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
1) En attendant les matériels commandés , j'ai regardé le protocole de communication entre le robot et le logiciel domotique Domoticz sur Rpi à choisir pour rester compatible avec l'API python existante du robot utilisée avec l'app de pilotage sur smartphone Android.
- Utilisation de messages "http request de type post" et messages "http response post " (200 OK par exemple)
- Besoin de la librairie python "requests"
payload = {'<test_api_python>'}
r = requests.post("http://192.168.0.x/post",data=payload)
Les messages suivant disponibles dans l'Api python du robot vont pouvoir etre utilisés par le logiciel domotique , sans impact sur l'API python du robot donc , dans le module d'initialisation du dialogue avec le robot (module "init_robot.py ) :
<test_api_python>
<test_arduino>
<start>
<stop>
2) Ensuite restera à définir :
- comment le logiciel domotique va indiquer au robot d'aller dans la zone du capteur qui a détecté un mouvement
- Comment le robot va aller dans cette zone du capteur .
==> J'ai pas vraiment refléchi à la problématique de la navigation dans ce contexte pour l'instant ( le robot connait sa position et doit rejoindre un autre endroit que le logiciel domotique lui donne....) :
==> Stratégie de navigation par carte ( ?)
Posté par
sur 19 novembre 2016 - 02:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
D'après la doc de la carte officielle Arduino Mega 2560 , le chipset FTDI-USB a été remplacé par le ATmega16U2
Posté par
sur 09 août 2016 - 04:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
La prochaine étape est l'installation sur le chassis du matériel Arduino de l'alimentation et sa batterie.
La carte Arduino Mega2560 va etre alimentée via l'entrée régulateur (7-12V) par une carte alim+batterie mais aussi par l'entrée USB du PC servant à téléverser le programme et à débugger (serial print).
La carte Arduino choisit automatiquement l'entrée régulateur et non l'entrée USB et gère bien ce conflit d'alimentation double.
Posté par
sur 08 juillet 2018 - 05:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
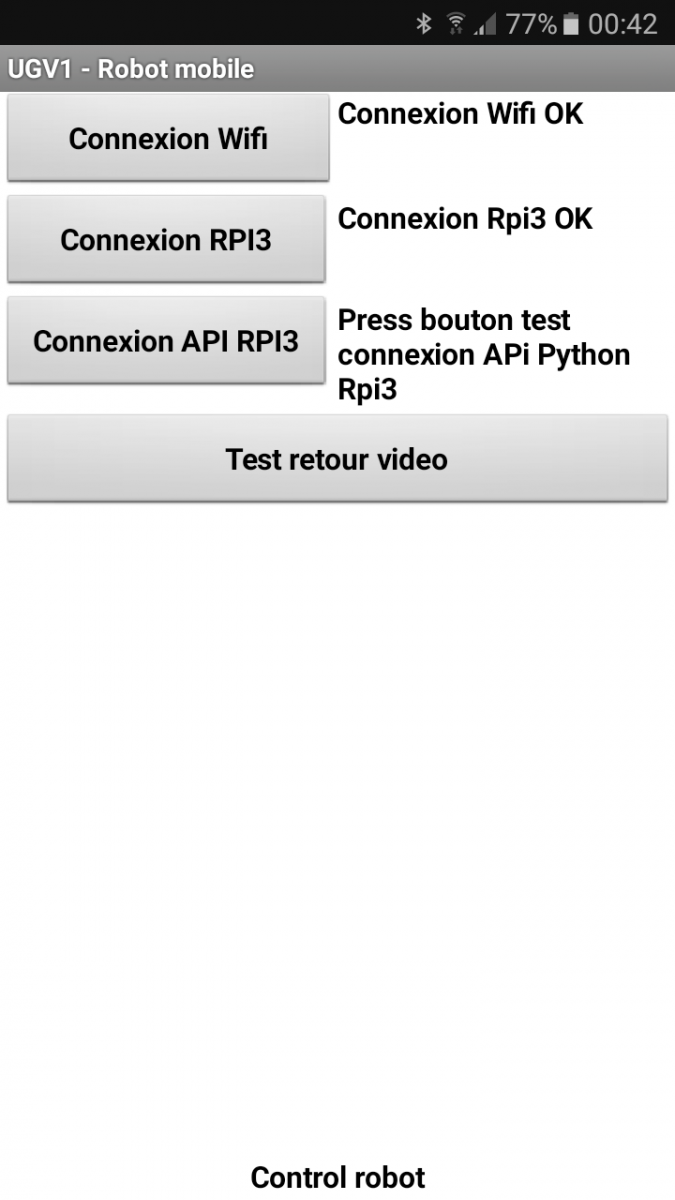
Retour sur l'appli smartphone Android ( MIT App Inventor2 ) pour ajouter un test de connexion au RPI3 supportant le logiciel domotique ( Bouton Test RPi3 Domo et son résultat )
La vision de nuit de ce modèle de caméra PI V2 est très faible .. mais on le sait.
Cela permets de savoir tout de suite si la solution réseau requise pour ce robot est opérationnelle.
Restera à définir ce que l'écran "Controle du robot par domotique" doit contenir ( au moins la position du robot en x,y,theta etc )
Posté par
sur 28 mars 2016 - 03:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour l'ajout du Wifi par un shield wifi sur ma carte Arduino UNO R3 , cela semble semble bien compromis , car selon la site officiel Arduino ce shield est inutilisable sur la UNO :
(*) Note on usage with ARDUINO UNO board:
The Wifi Shield 101 carries a library that is very complex and occupies more than 60% of the available memory, leaving small room for sketches. Please keep in mind even if that basic usage is supported, for complex projects we strongly reccomend to use the Wifi 101 Shield with an Arduino Zero , Arduino 101 or Arduino MEGA 2560.
EDIT :
La seule solution possible pour la Arduino UNO est le module wifi ESP8266 connecté sur le port série ( max 115000 bit/s) mais personne ne l'a encore utilisé ici à priori.
Note : La carte Arduino YUN a un module wifi intégré




