Posté par
Posté par
Salut,
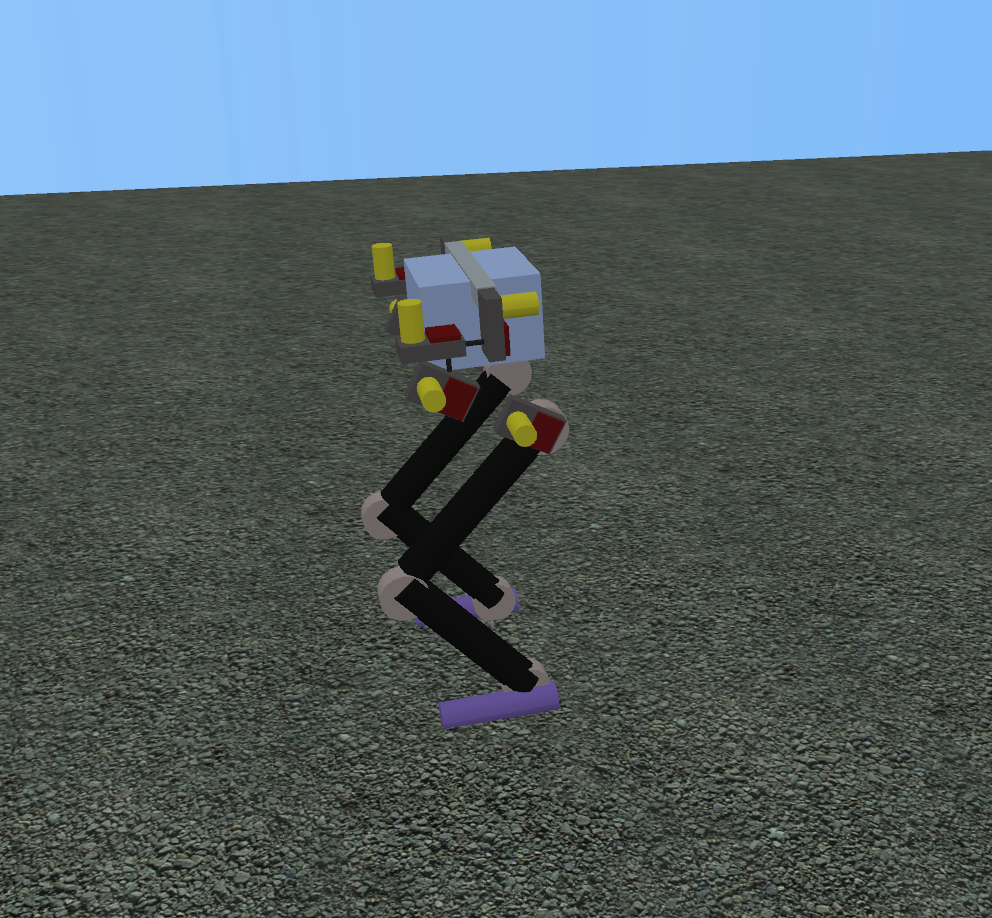
un petit coucou pour dire que depuis qu'on a changé les pieds de walk-e, le robot tien très bien debout, mais juste un petit truc
La stabilisation sur les cotés se fait assez facilement grâce aux hanches, par contre il a une tendance assez forte a se péter la tronche vers l'avant
on voit ce qu'on peut faire pour ca.
Si vous avez des questions style celle que Path a faite sur des trucs que l'on a déjà fait et que vous aimeriez que l'on explique hésitez pas je suis en vacances pour 5 jours donc je repasse du temps par ici 
Sinon dans le discord Robot Maker aussi c'est super cool ce qu'ils font sur le discord alors allez-y 











 j’espère juste que le délai n'est pas si long ...
j’espère juste que le délai n'est pas si long ...