ahah Merci  je vais lire demain et tout refaire car le 1er test est moche
je vais lire demain et tout refaire car le 1er test est moche
Contenu de yougo
Il y a 235 élément(s) pour yougo (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#85573 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
 Posté par
sur 08 juillet 2017 - 09:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 08 juillet 2017 - 09:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#85569 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 08:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Donc personne ?
#85562 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 05:09
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bien sur que je parle d'anykode ahahaha  ca va les servos en vrai je sais faire, mais sur le logiciel ... c'est spécial !
ca va les servos en vrai je sais faire, mais sur le logiciel ... c'est spécial !
#85557 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 03:37
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Et bien en gros, j'ai posé les servomoteurs (8 au total) c'est bien beau , mais je ne sais pas comment faire pour les changer d'angle
#85554 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 03:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
voila, j'ai fini de placé tous les servomoteurs, ils ne bougent pas, normal je n'ai rien fait pour qu'ils bougent (sauf 2) qui font un mouvement continu de 45° à 0° environs je ne sais pas trop pourquoi ...
Auriez vous un conseil pour faire bouger les servomoteurs à sa guise ? 
#85550 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 02:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
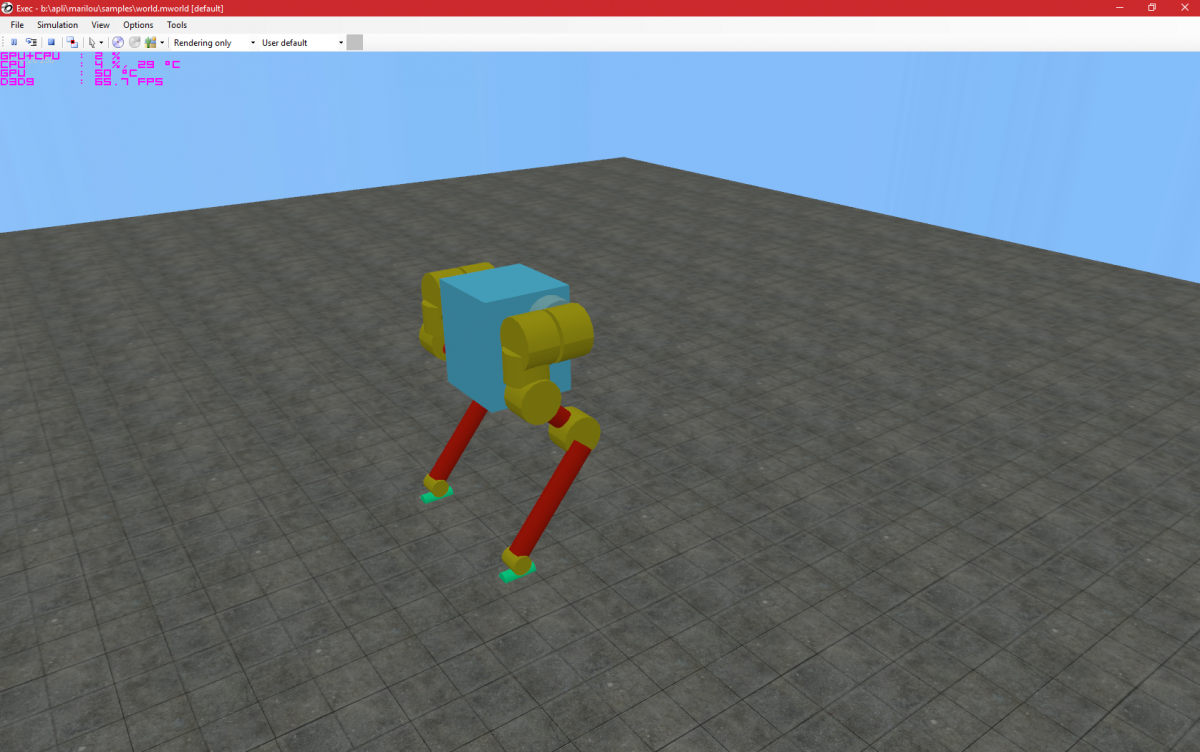
C'est pas ouf, mais c'est le 1er essai.
Il faut encore que je change des dimensions car la beaucoup ne sont pas les mêmes que sur les plans , mais bon je me forme encore ce n'est qu'un test
Image(s) jointe(s)

#85547 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 12:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'avais peur d’être perdu pour la modélisation sur ce genre de logiciels mais en fait ça va c'est plutôt facile. maintenant il faut que je voie comment on fait pour faire l'animation, car c'est bien beau d'avoir une structure mais j'aimerais lui faire faire quelques pas
#85520 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 07 juillet 2017 - 03:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est super tous les retours, merci beaucoup 
J'ai installé AnyKode, je découvre, ça parait plutôt simple pour l’instant, tant mieux !
Par contre les tutos a ma dispositions sont vraiment basiques, si vous avez des ressources, notamment par simulé un servomoteur (ou une articulation) ça serait sympa 
#85505 Entraînement d'un réseau de neurones artificiels grâce à un algorithme d...
Posté par
sur 06 juillet 2017 - 09:34
dans
Programmation
Merci,
R2D2 :
Les algos de npl sont extrêmement prisés, je ne suis absolument pas encore apte a faire ça, mais la recherche la dessus avance, le problème c'est qu'il vous faut une grannnnnnnde base de données. il est bien plus simple de faire comprendre une image qu'une phrase.
un petit lien si tu aimes lire :
http://u.cs.biu.ac.il/~yogo/nnlp.pdf
c'est sympa mais je n'ai pas fini
Didier :
* C'est le principe, si le poisson est encore là , c'est car il est parmi les meilleurs. Si il fait parti des meilleurs c'est juste car ses gènes font de lui ce qu'il est.
Le poisson en fait ne sais pas se comporté, il faut faire abstraction du "savoir" si tu es la ce n'est pas car tu "sais" respiré et que tu as décidé de le gardé, c'est juste que si tu ne lavais pas fait, tu ne serais pas la et toute ta descendance serait aussi éliminée.
Il faut vraiment voir le principe du darwinisme a travers cet algo. si le poisson 2 est la en train de manger, ce n'est pas car il en a décidé ainsi , c'est juste que sans ça, il ne serait pas la !
* J'ai plusieures versions de l'algo, mais dans beaucoup de versions le poisson 2 ne vas pas changé entre les deux générations, mais par contre on va prendre ses gènes et les faire mutés puis les transférés dans un autre poisson qui a fait un mauvais score, il y a donc des mutations du meilleur poisson qui sont testés, mais on le conserve quand même vivant au cas ou les mutations ne soient pas viables.
*Le poisson ne connais pas du tout le comportement de la génération 17 , puisque la encore les comportements sont juste le résultat d'un assemblage génétique. Le poisson va juste reprendre les mêmes gènes que le précédent. Un comportement n'est pas mesurable, on ne peut pas le stocké sous formes de données, en revance la structure d'un individu, qui elle régi son comportement est (dans se cas ) facilement stockable car elle est générée par le code génétique.
Par exemple, si je t'étudie, prends des notes sur ce que tu fais toutes ta vie , il y peu de chances pour que j'arrive a créer un clone de toi avec les mêmes comportements (même si je pouvais hein on est dans la métaphore). par contre si je sais la structure de ton cerveau et de t'es gênes, fastoche ! (bon après il y à a une histoire de vécu ect mais bon c'est un exemple)
voila j’espère clarifié un peu, si c'est pas le cas dites le il n'y a pas de soucis
#85466 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 10:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On prend toujours les infos Léon, on apprécie le mot de la fin
J'ai compris qu'il faut faire de la simulation ne vous en faites pas, on va travailler la dessus
et encore une fois je parle de simulation physique car la simulation de l’IA est déjà prévue...
C'est inutile donc d'encore essayé d'argumenter la dessus
Ce serrait plus utile que vous donniez des pistes pour la création physique, merci
#85463 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 09:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'avais déjà regardé solidworks je vais ré ouvrir ça alors
R1D1
Je comprends mieux les intérêts grâce a vous,pour L'IA la simulation est déjà prévue,
ce qui ne l’était pas c’était par exemple des test pour savoir si j'utilise telle ou telle matière cette pièce va elle cassée avec la force du robot ? ou encore quelle est la longueur de jambe optimale, la force des servomoteur minimale, quelle flexibilité ect ect... Et ça vraiment ça m’intéresse beaucoup, pour walk-e mais aussi pour le futur
#85460 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 08:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oracid voyons ne sois pas aussi pessimiste
Budet, tu as l'air de savoir pas mal de choses la dessus, si tu pouvais partager ton savoir, notamment sur le choix du logiciel ça serrait super !
#85445 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 05:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ah oui c'est vrai, my bad, merci 
#85440 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 04:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Budet c'est une intervention super intéressante, on a bel et bien un cahier des charges (qui est pour le coup en vrai cahier), la seule différente c'est qu'il n'est pas fait de façon"l'égale" mais plus pour nous même, on a vraiment tout ce que tu dis dedans, budget, plans croquis des idées ect ...
Truc que tu ne mentionne pas c'est qu'on a prévu un emploi du temps/planning pour à peut prés tout, je ne sais pas si c'est bien, en tous cas on essaye d’être organisé
l'étude des contraintes est faite déjà (calculs a la main pas de CAO désolé ... )
Et donc un bon logiciel de CAO qui permettrait de faire les simulations que conseillez vous concrètement ?
#85436 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 03:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Forthman déjà tu peux t'informer sur le projet ici :
https://fr.ulule.com/robot-walk-e/
comme tu peux le voir il y a beaucoup de contreparties
Du coté faire les preuves c'est exact, mais comme j'ai déjà dit, on a déjà étudié beaucoup d'aspects avec toutes les pièces 3D ect , le seul truc que l'on a pas fait (et ça à l'air de vous faire grincer) c'est les simulations informatiques, simplement car on ne sait pas comment ça marche, mais ne vous en faites pas je ne suis pas contre ou quoi, c'est juste que je n'ai jamais fait ça , et se former ça prend un temps fou...
Niveau sponsors on à déjà ce qu'il nous faut pour ce projet la, mais comme tu le dis, on attend de finir pour pouvoir chercher des sponsors pour des choses plus complexes.
Vous avez l'air de vous inquiéter beaucoup, ne vous en faites pas, on ne dit pas qu'il n'y aura pas quelques échecs, mais on a tout fait pour minimiser leur nombre
#85433 Entraînement d'un réseau de neurones artificiels grâce à un algorithme d...
Posté par
sur 05 juillet 2017 - 02:22
dans
Programmation
Merci  mais ce n'est pas fini
mais ce n'est pas fini
Je viens d'avoir les résultats de ça, j'ai eu 20/20
#85431 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 02:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Vous commencez à me convaincre, je vais installer un outil de CAO pour tester, un des gros frein que je me suis mis avec ça, c'est que je n'ai jamais utilisé la CAO donc ça serra une première...
Dans mon imagination je mettrais plus de temps à faire la conception par ordinateur (apprendre tout un nouveau logiciel) que d'essayer de faire une pièce de nombreuses fois en 3D (en fait on a plein de PLA qu'on a exprès pour tester des proto, avec nos sponsors on a le filament gratuit donc pas de soucis si on doit faire 10 fois une pièce avant d'y arriver)
#85429 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 01:00
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Donc avant de partir, NON on ne vas pas faire tout en simulation dès le début calmez vous, on va faire de la simulation, mais APRES avoir fait le robot, ou peut être de temps à autres pour vérifier des paramètres, mais il est hors de question de tout faire en simulation.
La simulation c'est surtout pour trouver les paramètres d'un réseau de neurone qu'on voulait le faire, on a vraiment pas le temps de tout faire en simulation.
Pour l'impriment on va se rabattre sur autre chose car je crois aussi qu'il est obligatoire d'en avoir une pour réalisé des essais.
Sachez juste que pour l'instant le payement n'est toujours pas la donc on ne peut rien acheter.
#85326 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 01 juillet 2017 - 03:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut salut, on va loué un imprimante pas loin de chez nous ça va être plus pratique pour nous donc merci quand même
#85306 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 30 juin 2017 - 08:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Sympa ça ! je vais me renseigner, il y aussi la dagoma NEVO qui semble pas mal
#85295 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 30 juin 2017 - 12:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu as raison, mais je vous rappelle que l'on a une chaîne YouTube, on est justement en plein tournage de la vidéo de remerciements.
Justement une grosse partie du projet est dédiée à la chaîne, donc des news, il va y en avoir, beaucoup, on mettra les nouvelles vidéos en annonce sur le Ulule, comme ça ceux qui ne savent pas encore vont migré vers YouTube pour nous suivre
Je note pour la Make it Happen, je rajoute ça au script
#85288 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 30 juin 2017 - 10:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je t'avais prévenu et proposé une alternative... Tu as refusé ... Bon pas grave ^^ C'est comme ça qu'on apprend !
J'ai refusé pour vous car je croyais que ça n'allait jamais marché ...
Oui c'est ce qu'on va faire, peut être que l'on va loué une imprimante aussi le temps de recevoir.
Le soft se fait en général après le hard hein, mais bon oui on y travaille déjà.
On attend juste le virement de Ulule, qui met plusieurs jours avant de prendre les servomoteurs
#85276 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 29 juin 2017 - 09:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci
Bien sur toute l'équipe est a fond !!!!! Le probleme c'est que la plupart des pièces nécessitent une imprimante 3D :kez_13:
L'impression par pièce j'ai déjà fait , c'est cool , pas cher MAIS il faut que vous soyez sur a 100% de ce que vous faites imprimé au gars, et donc dans notre cas ça reviendrait trop cher si on se trompe quelque part ...
On cherche donc une imprimante qui égale la prusa...mais bon c'est impossible ahahha
#85271 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 29 juin 2017 - 07:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Un second post pour dire que :
Nous sommes a la recherche d'une PRUSA I3 MK2
donc si quelqu'un veut vendre la sienne par le pur des hasards on la reprend prix neuf, car on doit attendre 7 semaines sans rien faire sinon...
J'ai contacté Prusa eux mêmes ils disent qu'ils ne veulent pas faire de favoritisme, ce qui est respectable de leur part.
#85270 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 29 juin 2017 - 07:47
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ahahahah oui c'est un membre de la famille, ils sont géniaux !
nvaste, on va pas faire des vidéos de 15 heures, mais si ca vous interresse de savoir comment marche un proco de l'interieur (pas l’architecture car jsuis nul , mais plutôt portes logiques et tout ) je le note




