En dehors du bruit de machine à café tu veux dire ?
Je ne sais pas pourquoi ils font autant de bruit... Les réglages des drivers ?
Il y a 15 élément(s) pour Lanzeur (recherche limitée depuis 21-mai 13)
 Posté par
sur 07 août 2018 - 07:41
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 07 août 2018 - 07:41
dans
Bras 6 axes BCN3D Moveo
En dehors du bruit de machine à café tu veux dire ?
Je ne sais pas pourquoi ils font autant de bruit... Les réglages des drivers ?
Posté par
sur 01 août 2018 - 12:48
dans
Bras 6 axes BCN3D Moveo
Alors comme ça il est moche mon jardin ?? 
Je ferai une vidéo avec des mouvements complexes et répétitifs afin de mieux voir les mouvements du robot.
Posté par
sur 31 juillet 2018 - 09:21
dans
Bras 6 axes BCN3D Moveo
Hey !
Désolé pour le retard, entre le déménagement et les projets en entreprises je n'ai pas eu le temps d'actualiser le sujet.
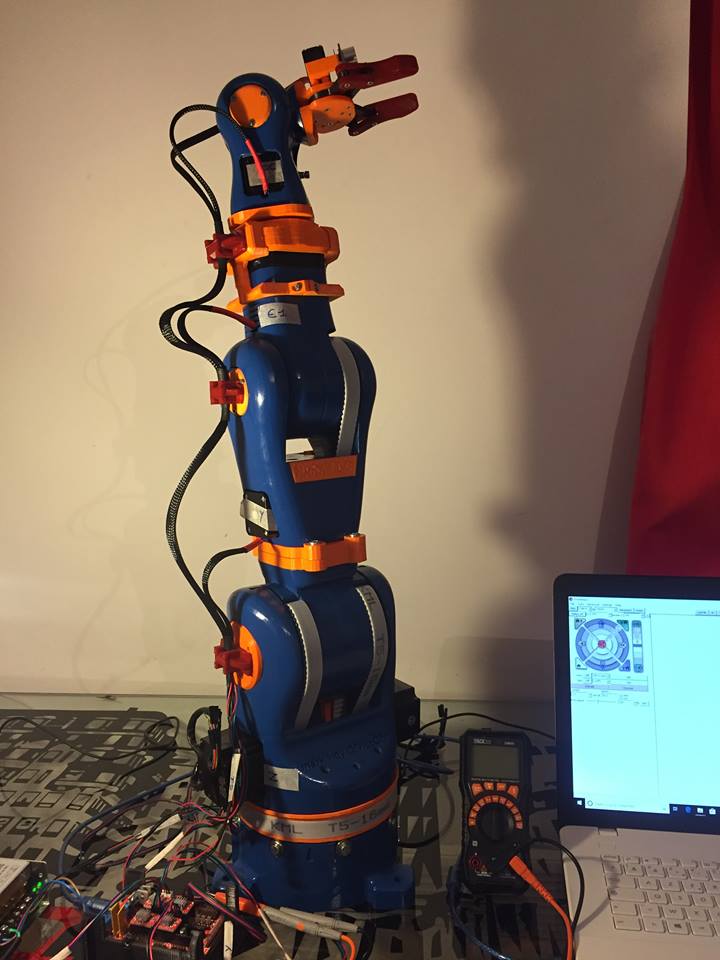
A la fin du troisième mois voici ce que nous avons :
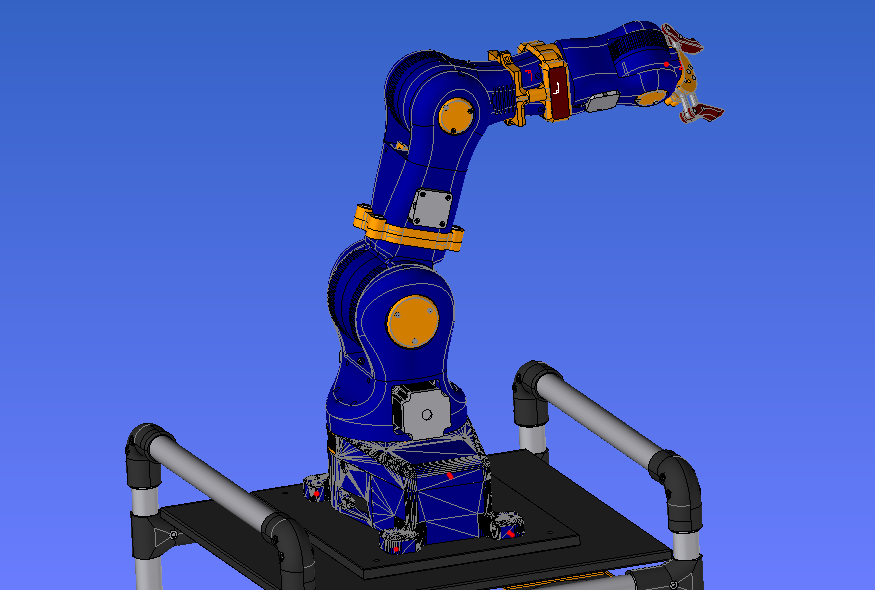
Une structure enfin terminé :


Un logiciel fonctionnel avec une interface graphique. Répondant parfaitement au commande en G.code.
Maintenant il me reste un moi pour transformer des positions relative en G.Code afin de pouvoir créé automatiquement des programmes.
Posté par
sur 16 juillet 2018 - 09:39
dans
Bras 6 axes BCN3D Moveo
Quelques photos de l'avancée des travaux :
Fabrication de la structure principale :

Électronique terminé à 80%



Posté par
sur 11 juillet 2018 - 07:15
dans
Bras 6 axes BCN3D Moveo
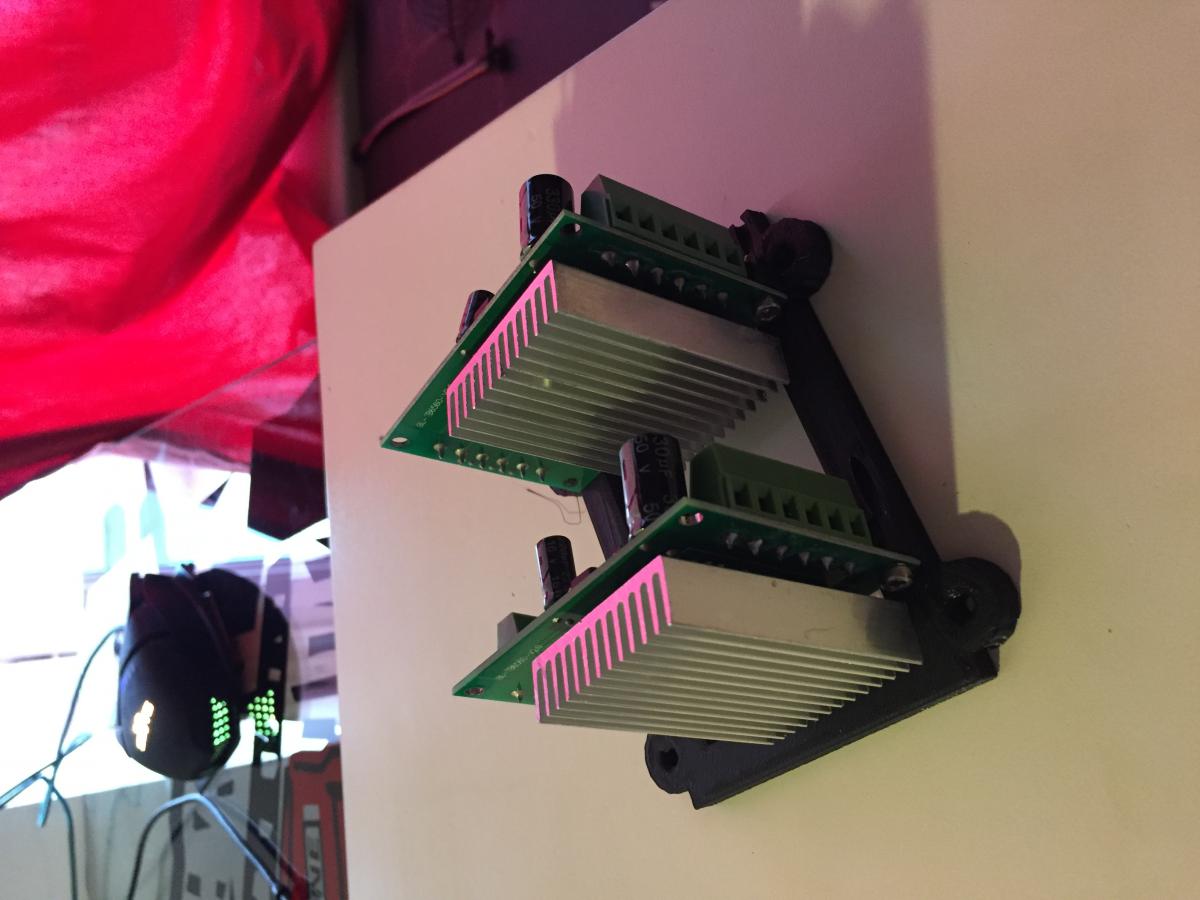
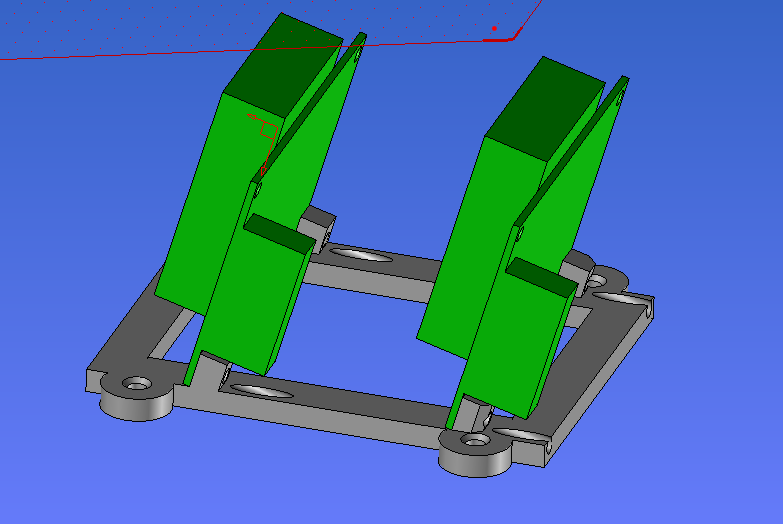
Support terminé !
Posté par
sur 10 juillet 2018 - 03:00
dans
Bras 6 axes BCN3D Moveo
Je peux facilement renommer les axes, mais j'ai utilisé ces termes pour mon câblage et pour me retrouver dans marlin. Pour les nema 23 c'est bien ce que je pensai ( 1 par nema 23) . A propos ils sont arrivés ce matin et le support est en cours d'impression 
Posté par
sur 10 juillet 2018 - 12:55
dans
Bras 6 axes BCN3D Moveo
Interface créé ce matin, on test ça ce soir 
L'interface n'est pas parfaite mais c'est une base pour mieux comprendre la chose. Je pense quitter pronterface d'ici peu
Posté par
sur 10 juillet 2018 - 11:18
dans
Bras 6 axes BCN3D Moveo
Salut Theo-Paul, tu pense mettre les deux néma 23 sur un seul driver ? Cela est faisable ? ( de toute façons j'ai acheté deux driver Tb6550)
Posté par
sur 09 juillet 2018 - 02:57
dans
Bras 6 axes BCN3D Moveo
Commander le bras robotique via pronterface.
Etape numéro 1 : définir les objectifs
1-Contrôler manuellement le robot.
2-Ajuster la force du servo-moteur pour éviter qu’il surchauffe
3-Ajouter des commandes G-code
4-Enregistrer des positions et les affecter à des programmes.
5-Contrôler la température des composants (driver Ramps 1.4).
6-Contrôler le robot à distance via une tablette.
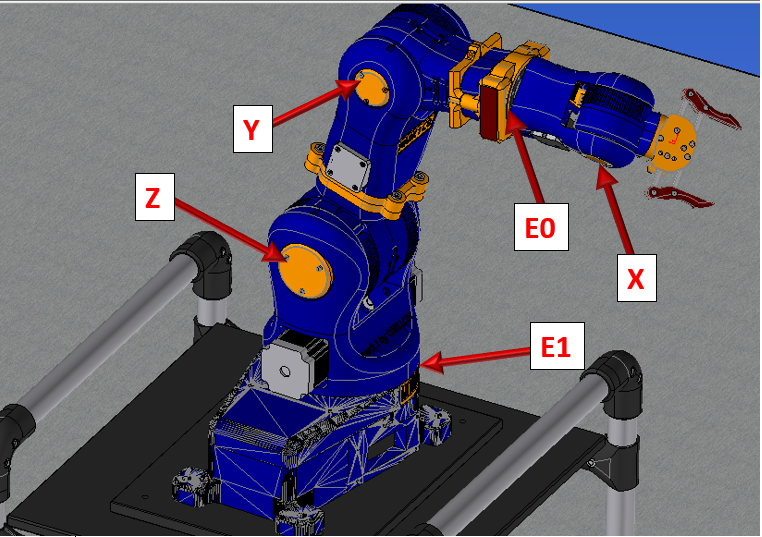
Etape numéro 2 : Contrôler manuellement chaque axe
-Les axes «X », « Y » et « E0 » répondes aux Gcode
-L’axe « E1 » ne répond pas aux Gcode, le problème vient du firmware où le deuxième extrudeur n’est pas configuré.
-L’axe « Z » n’est pas encore relié (manque driver tb6560)
Etape numéro 3 : Ajuster la force du servo-moteur pour éviter qu’il surchauffe
-Dans un premier temps il faut relier le servo moteur à la ramps (voir sujet précédent)
-Ensuite une commande en G-code permet d’ajuster la valeur angulaire du servo (comme un potentiomètre)

-Ajouter des commandes pour ajuster manuellement la fermeture de la pince. Une fois la position enregistrée ajouter une valeur de force au servo moteur. ( voire exemple en fin de chapitre )
Etape numéro 4 : Enregistrer des positions et les affecter à des programmes.
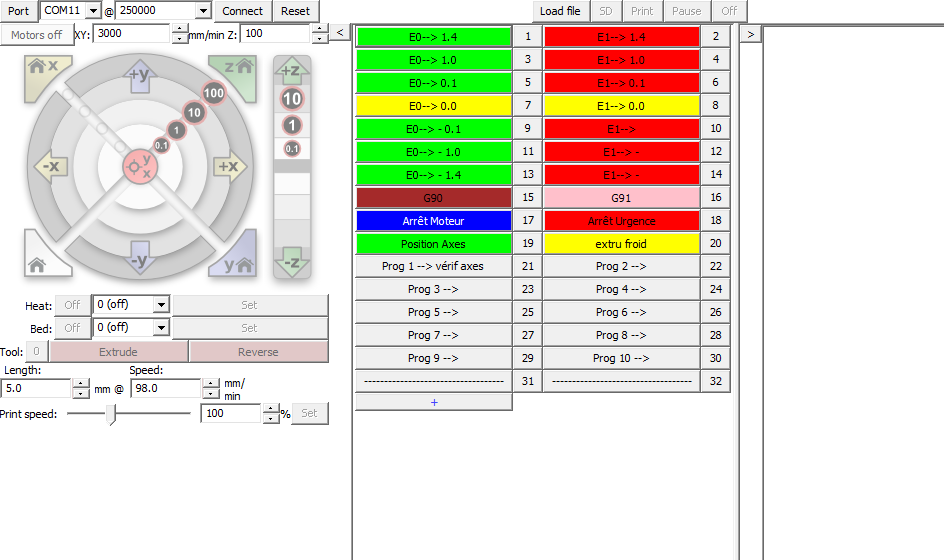
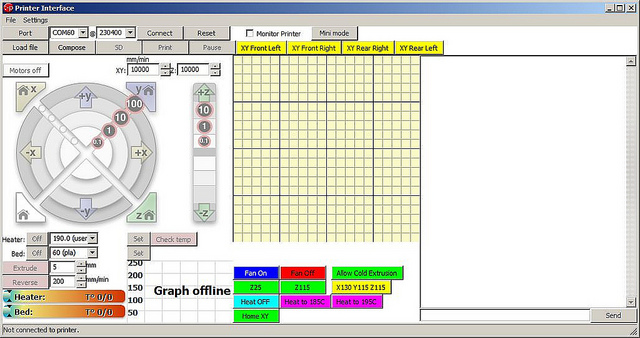
L’avantage de Pronterface c’est qu’il est complètement modulable, ainsi, à l’image d’un userform il est possible d’affecter des lignes de code à une image.
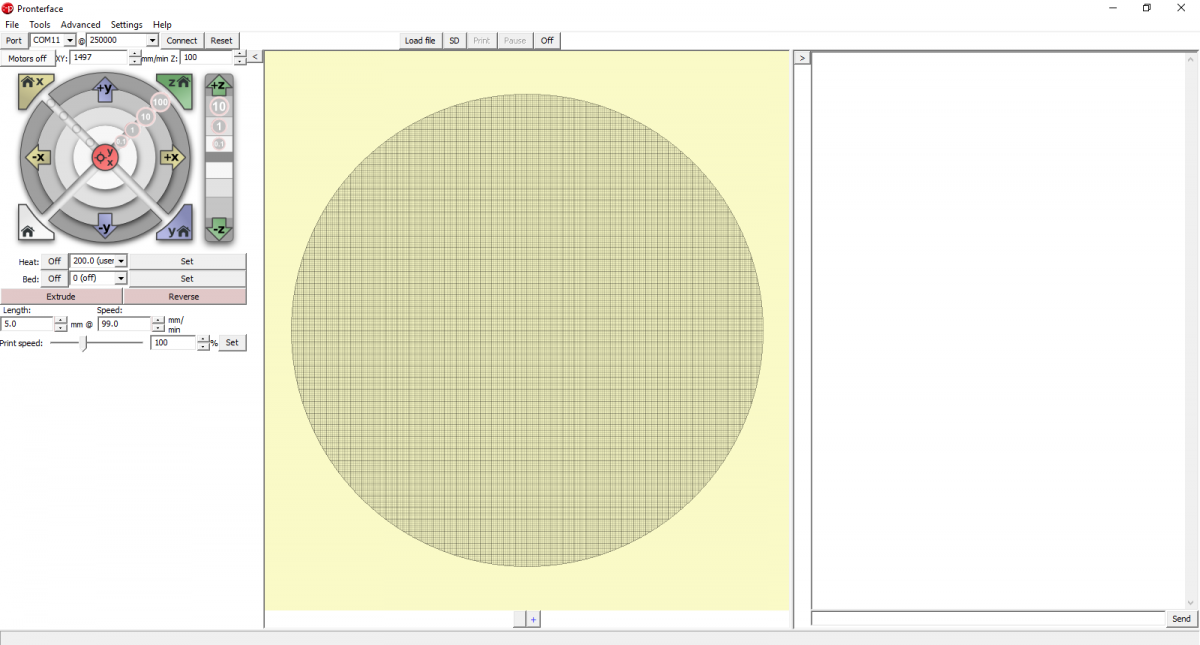
Pronterface de base :
Pronterface custom :
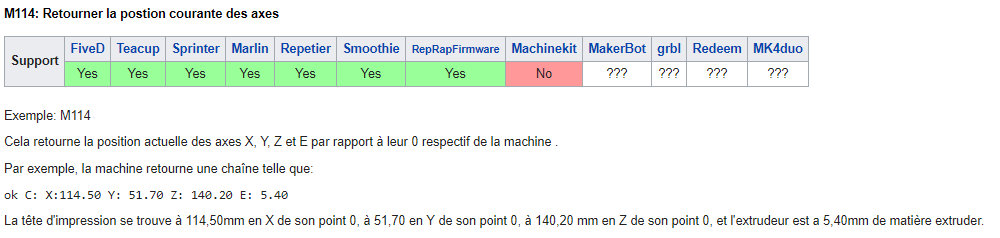
De plus, certaine commandes permettent de retourner les positions des axes.
Etape numéro 5 : Contrôle de température
Etape plutôt simple : avoir un retour température sur mes composant et afficher des messages d’alerte dû à une température trop élevée.
Etape numéro 5 : Contrôler le robot à distance via une tablette.
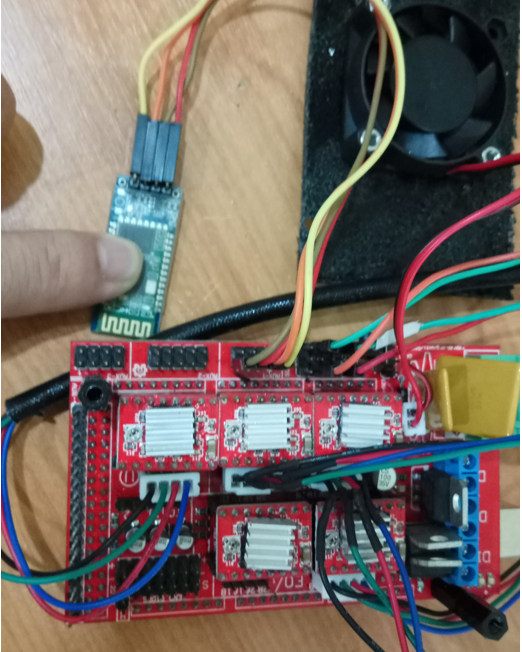
Mise en place d’un récepteur Bluetooth HC-06 pour commander mon bras à distance.
HC-06
Exemple
Mon bras doit prendre un objet souple à un point A et le déposer à un point B
1-Passage en mode manuel, via mon interface pronterface je contrôle les 5 axes de mon robot.
2-Je positionne mon robot dans la position désiré du point A
3-Via un bouton j’enregistre la position des moteurs ( M114 )
4-Je règle mon servo moteur via la commande.
5-je positionne et j'’enregistre la position B
6-Je génère automatiquement le Gcode et je l’affecte à une macro
7-Je lance la macro
Voilà comment je souhaite contrôler le robot.
Posté par
sur 09 juillet 2018 - 12:50
dans
Bras 6 axes BCN3D Moveo
J'aurai du temps libre cette aprèm, j'expliquerai ma procédure. Mais le but est de détourner pronterface pour l'adapter à mon bras. Enlever les choses inutiles et rajouter des fonctionnalités.
Posté par
sur 09 juillet 2018 - 10:56
dans
Bras 6 axes BCN3D Moveo
Hey !!
C'est ton projet qui m'a motivé à me lancer donc je te remercie
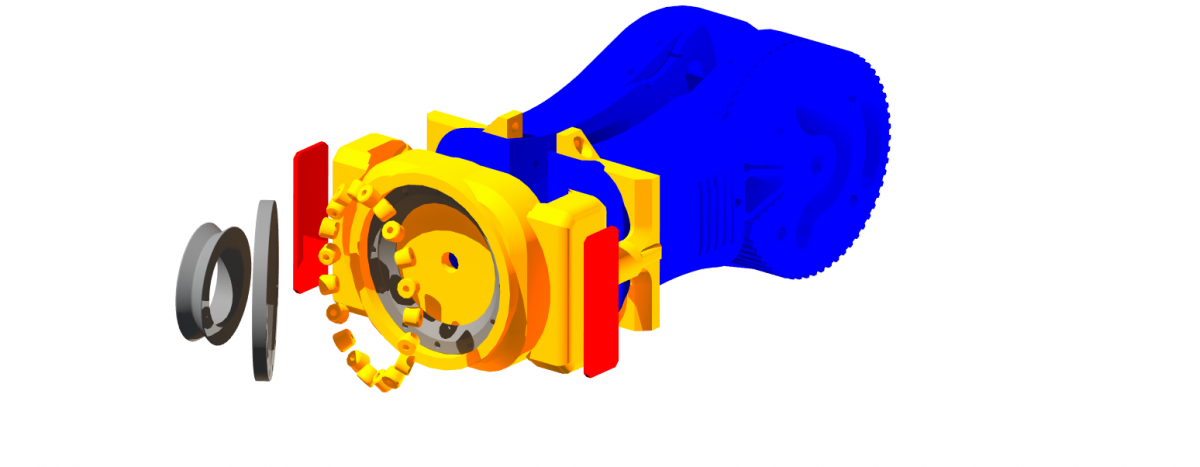
La partie mécanique était assez simple dans le sens où beaucoup de pièces étaient déjà conçues. Je t'envoie quelques détails sur la partie en orange ce soir.
Concernant la partie commande, mon objectif est simple. Commander mon robot manuellement jusqu'à la position voulut en command gcode ( via pronterface modifié pour l’occasion) Enregistrer la position et créé automatiquement le programme. Les premiers essais sont pas trop mal et surtout rapide. Je n'ai pas encore le niveau pour coder un programme complet en arduino.
Posté par
sur 08 juillet 2018 - 09:40
dans
Bras 6 axes BCN3D Moveo
Aujourd'hui c'était mise en marche des premiers moteurs avec un résultat mitigé 
Le nema 14 ne vas toujours pas 
En gros le courant limite correspond à la tension de référence (VREF) X 2. Ce qui donne pour mon moteur indiquant un courant limite de 0.28A par phase, une tension "VREF" à régler à (1/2), soit 0.14V
Mais mon moteur ne commence à tourner qu'à partir de 0.7V donc il tourne bien, répond aux commandes mais il chauffe beaucoup et fait un bruit aigu même à l'arrêt.
Donc il devrait survivre au réglage mais je le remplace par un nouveau moteur avec la data sheet suivante : 1.25A par phase, Holding Torque 9Ncm, 12V
Le reste fonctionne bien et répond bien au G-code  L'avantage est que les moteurs commencent en même temps et se termine au même moment..
L'avantage est que les moteurs commencent en même temps et se termine au même moment..
Cependant il me reste deux problèmes à régler :
1- Pronterface ne détecte pas mon E1 ( surement à cause de marlin) et quand je rentre un T1 (T: Select Tool) il ne reconnaît pas mon moteur p.a.p
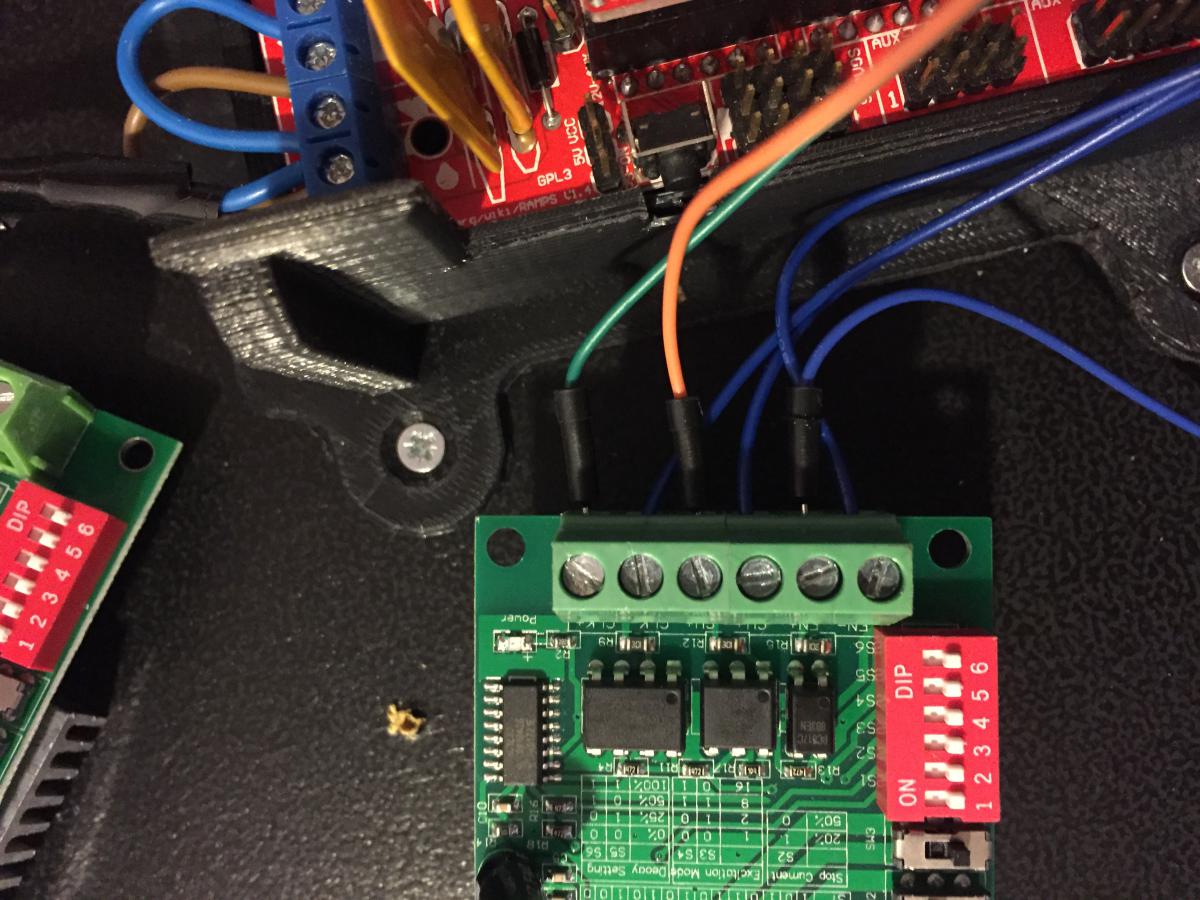
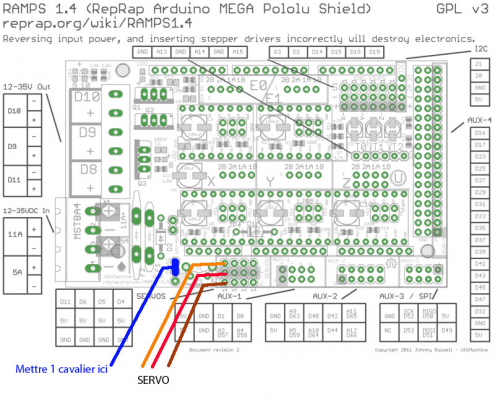
2-Comment relier mon servo moteur à ma ramps et comment le mettre en marche ?
Je ne comprends pas l’intérêt du cavalier sur l'image, et je ne vois pas de commande en G-code pour activer le servo. Des idées ?
Posté par
sur 08 juillet 2018 - 09:57
dans
Et si vous vous présentiez?
Merci pour l’accueil, oui je travail sur un bras robotique (Le sujet est sur le forum  )
)
Posté par
sur 08 juillet 2018 - 12:22
dans
Et si vous vous présentiez?
Salut la compagnie.
Après plusieurs mois à contempler vos post, c'est décidé je me lance !!
Originaire d' Angers (49), j'étudie à Montaigu ( Vendée !!!!!) et je travaille en Loire atlantique.
Je suis apprenti Technicien Méthode pour un groupe industriel spécialisé dans l'habitat.
Passionné depuis quelque temps par la robotique et la domotique je suis heureux de pouvoir participer à la vie de ce forum.
A très bientôt sur les différents sujets du forum !
Posté par
sur 08 juillet 2018 - 12:05
dans
Bras 6 axes BCN3D Moveo

Objectif : 4mois pour réaliser la bête de A à Z.
Mai 2018 : Lecture, prise de note, budget, achat et conception.
Je serai en mesure de vous lister les liens principaux pour les intéressés 
Conception des nouvelles pièces afin de renforcer la structure.
Conception du support permettant le transport
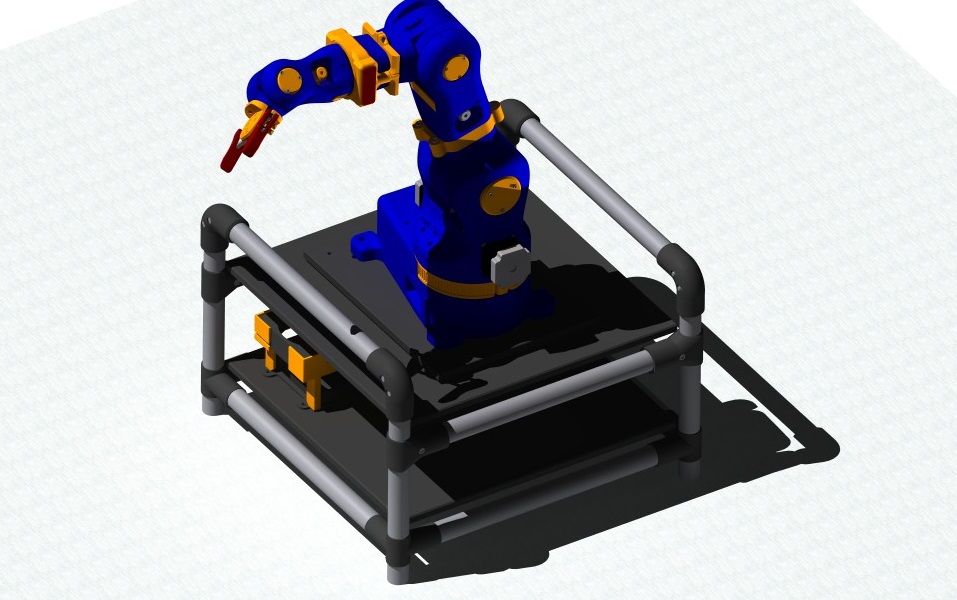
Le système est composé de deux étages. Le premier sert à la partie électronique et le deuxième sert pour le bras robotisé. L’ensemble est pourvu de poignées de transport.
Juin 2018 : Impression 3D, Montage, Câblage.
Les éléments ont été imprimés en 3D ( PLA Noir) , le processus finition est le suivant :
1- Ponçage au grain 180
2-Ponçage au grain 320
3-Enduit carrossier
4-Ponçage grain 320
5-Couche d'accroche x3
6-Couche de peinture acrylique bleu x2

Assemblage des éléments
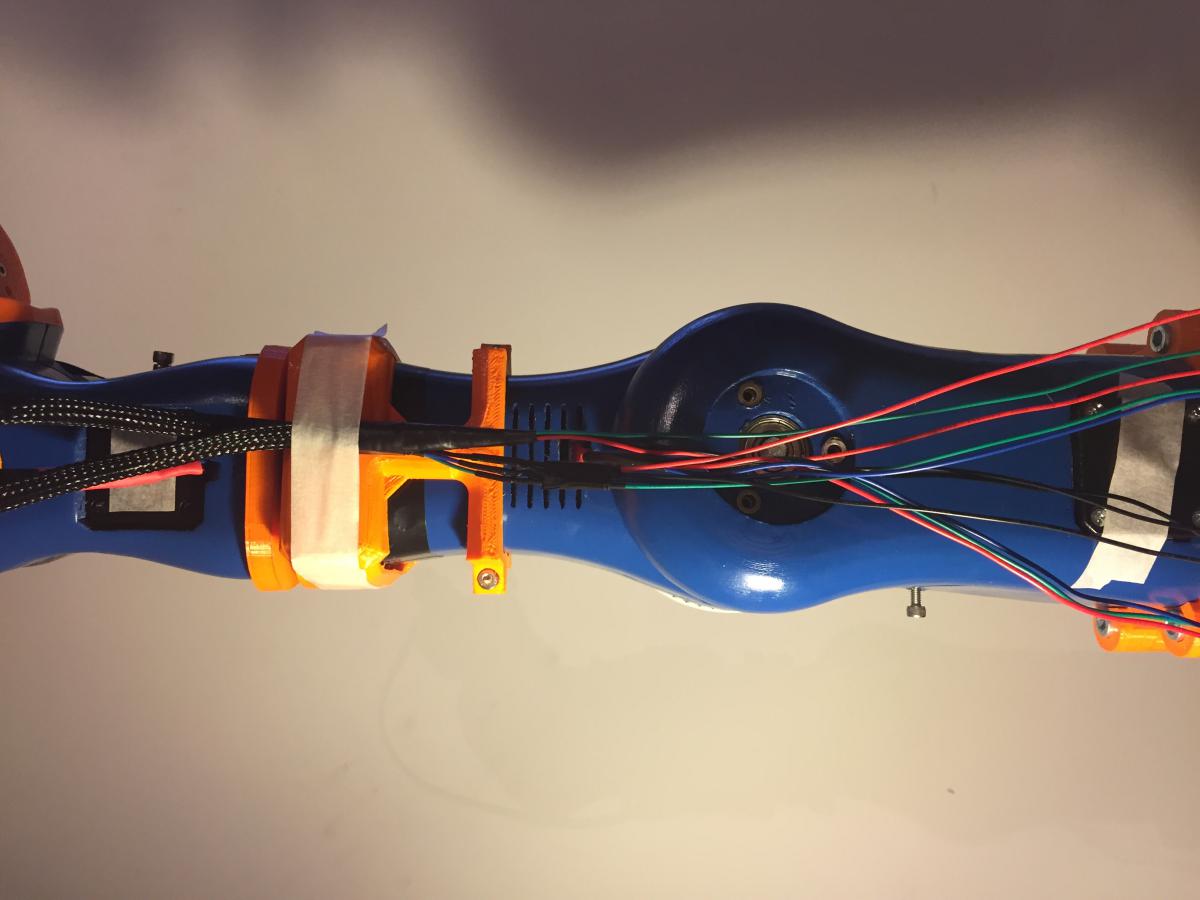
Cablage


Structure complète à 93% 
Juillet 2018 : Electronique, Commande via pronterface.
Et là on arrive au gros du problème... hardware et software 

Comment tout connecter sans tout casser ???
Concrètement je branche l'ensemble de mes moteurs sur une ramps 1.4. on à donc
1 servo moteur --> ramps 1.4 -->arduino--> Marlin --> Printerface
1 nema 14 --> driver a4988 --> ramps 1.4 --> arduino--> Marlin --> Printerface
3 nema 17 --> driver a4988 --> ramps 1.4 --> arduino--> Marlin --> Printerface
2 nema 23 --> driver tb6560--> ramps 1.4 --> arduino--> Marlin --> Printerface
A partir de ce moment il va me falloir de l'aide et malheureusement mes recherches ne donnent rien
Problème :
Comment connecter mon nema 14 à ma ramps ?
Le ( ou la, je ne sais pas) data sheet du moteur indique cela :
7.4v 0.28 a/phase
Or ma ramps est alimentée en 12V 5A donc je ne risque pas de faire chauffer mon moteur ? Je ne souhaite pas faire brûler mes bobines...

Reste à faire :
1-Connecter le servo moteur
2-Connecter les nema 17
3-Connecter les nema 23
4-s'amuser un peut.
Donc voilà, si quelqu'un à la réponse à ma question il aura toute ma gratitude.




