Contenu de VincentB
Il y a 50 élément(s) pour VincentB (recherche limitée depuis 14-juillet 14)
Par type de contenu
Voir pour ce membre
#38359 Animation pilote dans une maquette
 Posté par
sur 29 janvier 2012 - 07:21
dans
Modélisme et modèles réduits
Posté par
sur 29 janvier 2012 - 07:21
dans
Modélisme et modèles réduits
#38355 Animation pilote dans une maquette
Posté par
sur 29 janvier 2012 - 06:20
dans
Modélisme et modèles réduits
Oui l'aide m'avait été donné par le forum Arduino, les petits mouvements de tête, aléatoire avec random et modulo pour atténuer les saccades, le code est sur ma page web, ainsi que la vidéo http://www.retroplane.net/mira3/page2.htm
#37674 Animation pilote dans une maquette
Posté par
sur 06 janvier 2012 - 09:41
dans
Modélisme et modèles réduits
#include <Servo.h>
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
int bouton = 2;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
pinMode(bouton, INPUT);
}
void loop() {
if (digitalRead(bouton) == HIGH)
{
delay(2000); //pause 2s avant commencer animation
{
for(bra = 90; bra>=50; bra-=1) //le bras se lève
for(tet = 90; tet < 110; tet += 1) //je voudrais que la tête bouge en même temps que le bras se lève, mais avec ce code la tete bouge en boucle rapidement et le bras monte hyper lentement pendant 30s, en fait les delay ne sont pas pris en compte et gènent et seulement apres le reste de l'animation se joue
{
tete.write(tet);
delay(20); //ce sont ces delay qui genent l'anim, si je les enlève ça marcherait mais les servo s'actionnent trop rapidement
bras.write(bra);
delay(20); //ce sont ces delay qui genent l'anim, si je les enlève ça marcherait mais les servo s'actionnent trop rapidement
}
}
delay(4000); //le bras reste levé 4s
for(bra = 50; bra < 90; bra += 1) //le bras se baisse
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1) //la tête tourne a droite de 40°
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1) //la tête tourne a gauche de 80°
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1) //la tête revient vers la droite, décalé du centre de 20°
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6) //la machoire s'actionne 6 fois
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(4);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(4);
}
compteur++;
}
}
}
#37673 Animation pilote dans une maquette
Posté par
sur 06 janvier 2012 - 06:17
dans
Modélisme et modèles réduits
et c'est quoi? on ne met plus loop?des commandes directes
c'est ce que je pensais avoir fait, mais je n'y arrive pas, je suppose que ça vient des parentheses mal placées? mais ça fait 2 jours que j'essaye des centaines de fois sans y arriver, donc là je peux pas faire plus, tant pis je sens que je vais abandonnerSoit tu mets dans la boucle les commandes pour plusieurs servos.

#37651 Animation pilote dans une maquette
Posté par
sur 05 janvier 2012 - 05:17
dans
Modélisme et modèles réduits
après avoir fait mon animation, je me rend compte que pour le réalisme, il faudrait que j'ai des petits mouvements de tête en même temps que mon pilote parle, et mouvements de tête en même temps que le bras bouge. Pour l'instant la programmation était faite en sorte d'avoir chaque servo qui marche les uns après les autres
ça fait 2 jours que je m'arrache les cheveux pour trouver le bon code, mais impossible d'y arriver, je sens que je vais tout abandonner
je vous mets ci dessous le code que j'ai cru comprendre qu'il faille faire, mais en fait ça lance le servo tete en boucle et rien d'autre se passe, alors que je pensais que ça aurait fait bouger la tête en même temps que le bras. J'avais presque reussit un autre code, mais là les delay n'étaient pas pris en compte, je ne sais pourquoi, donc les servo partaient à toute vitesse
j'espère que vous aller pouvoir m'aider et me donner le bon code, par exemple tout au début, pour faire bouger la tête en même temps que le bras, merci, je craaaque, snifff
#include <Servo.h>
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
int bouton = 2;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
pinMode(bouton, INPUT);
}
void loop() {
if (digitalRead(bouton) == HIGH)
{
delay(2000); //pause avant demarrage
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
for(tet = 90; tet>=70; tet-=1)
{
tete.write(tet);
delay(30);
}
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1)
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1)
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1)
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(4);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(4);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 5)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 15)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
for(tet = 110; tet>=75; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 75; tet < 100; tet += 1)
{
tete.write(tet);
delay(15);
}
int compteur = 0;
while (compteur < 18)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 8)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1200);
int compteur = 0;
while (compteur < 12)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1000);
int compteur = 0;
while (compteur < 10)
{
for(mache = 90; mache < 120; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 120; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
}
}
}
}
}
}
delay(2000);
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(1000);
for(tet = 100; tet>=60; tet-=1)
{
tete.write(tet);
delay(20);
}
for(tet = 60; tet < 90; tet += 1)
{
tete.write(tet);
delay(20);
}
}
}
#37476 Animation pilote dans une maquette
Posté par
sur 31 décembre 2011 - 06:15
dans
Modélisme et modèles réduits
#37464 Animation pilote dans une maquette
Posté par
sur 31 décembre 2011 - 04:34
dans
Modélisme et modèles réduits
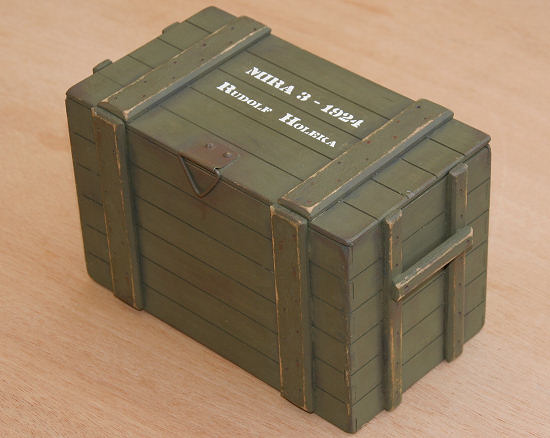
Finalement j'ai préféré mettre tout le matériel d'animation dans une caisse, qui sera branchée discrètement sous le planeur, plutot que de l'embarquer dans le planeur, qui en vol ne servirait à rien, gain de poids et place qui m'arrange bien
Pour ce qui est de la télécommande, j'ai réussi a modifier le code et donc remplacé par un bouton poussoir, la synchro est bonne, quand j'entend le bip de départ de la bande son, j'appuie sur le bouton et l'animation démarre
Voici la caisse que j'ai faite en ctp 15x10x9cm peinte à la Humbrol et veillit, les lettrages sont peints avec un pochoir découpé à la CraftRobo.
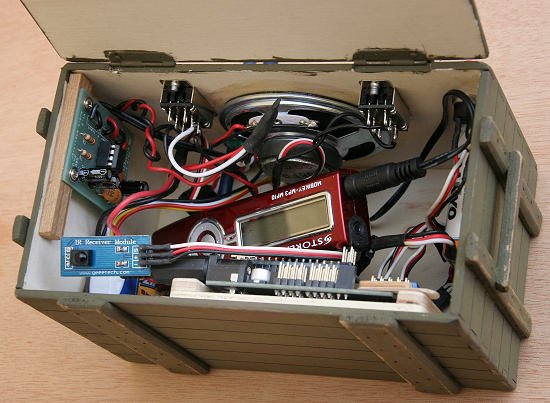
Vue arrière avec le HP et les inter, qui ne se verront pas, puisque la caisse sera contre le fuselage

merci à tous pour votre aide, je continue a suivre le forum, c'est passionnant ce que vous faites, et pour le prochain planeur j'essayerais d'intégrer le lecteur mp3 à la carte avec votre aide, ou peut être pour celui là, mais je me pencherais sur le sujet quand j'aurais terminé la construction du planeur, j'ai encore 4 ou 5 mois de boulot
voici le code final de l'animation, déclenché par le bouton poussoir
#include <Servo.h>
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
int bouton = 2;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
pinMode(bouton, INPUT);
}
void loop() {
if (digitalRead(bouton) == HIGH)
{
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1)
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1)
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1)
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 5)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 15)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
for(tet = 110; tet>=75; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 75; tet < 100; tet += 1)
{
tete.write(tet);
delay(15);
}
int compteur = 0;
while (compteur < 18)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 8)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1200);
int compteur = 0;
while (compteur < 12)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1000);
int compteur = 0;
while (compteur < 10)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
}
}
}
}
}
}
delay(2000);
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(1000);
for(tet = 100; tet>=60; tet-=1)
{
tete.write(tet);
delay(20);
}
for(tet = 60; tet < 90; tet += 1)
{
tete.write(tet);
delay(20);
}
}
}
#37416 Animation pilote dans une maquette
Posté par
sur 29 décembre 2011 - 10:14
dans
Modélisme et modèles réduits
Sur des sites, j'ai cru comprendre que un bouton poussoir se montait comme ça?
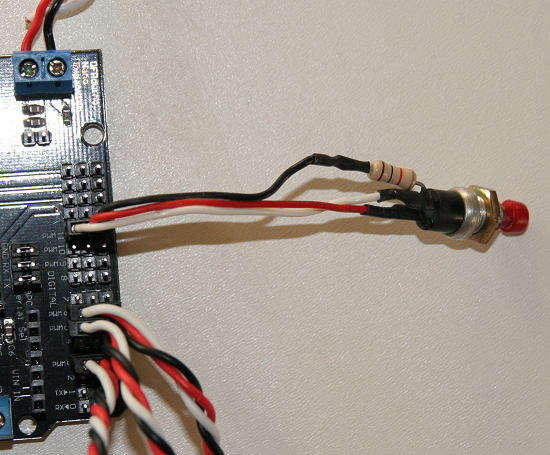
(jai soudé une resistance de 10k)
mais vous pouvez me confirmer que c'est bon? j'ai toujours peur de crâmer la carte en faisant des choses au pif
et pour remplacer le recepteur IR de la télécommande, je branche aussi mon bouton poussoir sur la pin 11?
si vous pouviez m'aider a remplacer le code de la telecommande (qui est 3 messages plus haut) pour actionner l'animation par ce bouton poussoir plutot que par la telecommande, merci

#37407 Animation pilote dans une maquette
Posté par
sur 28 décembre 2011 - 05:27
dans
Modélisme et modèles réduits
Mais je préfèrerais finalement essayer de déclancher l'animation avec un simple petit bouton poussoir.
Comment branches t'on un bouton poussoir à 2 contacts? sur quelles pins du shield? et quel code doit on mettre pour remplacer celui de la télécommande. Avec ce bouton poussoir je voudrais donc pouvoir juste lancer l'animation dont le dernier code est ci-dessus. Il me sera facile de camoufler ce bouton poussoir sur le planeur, et ça m'éviterait la télécommande, qui semble un peu camelote
Pour la bouche, la synchro serait bien sûr perfectible en ajoutant quelques micro pause de plus, mais vu la taille de la bouche on ne voit vraiment pas grand chose. En fait sur la video on voit plus les défauts qu'en vrai
Voici la petite video du pilote avec le son
http://www.retroplane.net/mira3/animation_pilote.wmv
#37400 Animation pilote dans une maquette
Posté par
sur 28 décembre 2011 - 12:37
dans
Modélisme et modèles réduits
La télécommande, j'avais demandé à Yves, juste un démarrage de l'animation via bouton play, mais pas spécialement d'arrêt, puisqu'elle ne dure que 1 minute et s'arrête seule à la fin. Là j'ai terminé le code de synchronisation avec ma bande son, je ferais une petite video cet aprem. Apparement ma télécommande marche maintenant comme il faut, du moment que j'alimente ma carte/shiel par uniquement le bornier bleu + jumper, donc je ne touche plus à rien.
Je vous mets le code, au cas où il y aurait de grossières erreurs, mais bon pour ce dont j'ai besoin il marche, donc même s'il n'est pas parfait je pense que je ne vais plus trop y toucher
#include <IRremote.h>
#include <Servo.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop() {
if (irrecv.decode(&results)) {
if(results.value == 0xFFC23D)
{
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1)
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1)
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1)
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 5)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 15)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
for(tet = 110; tet>=75; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 75; tet < 100; tet += 1)
{
tete.write(tet);
delay(15);
}
int compteur = 0;
while (compteur < 18)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 8)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1200);
int compteur = 0;
while (compteur < 12)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1000);
int compteur = 0;
while (compteur < 10)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
}
}
}
}
}
}
delay(2000);
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(1000);
for(tet = 110; tet>=60; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 60; tet < 90; tet += 1)
{
tete.write(tet);
delay(15);
}
irrecv.resume();
}
}
}
Pour l'instant j'ai prévu de lancer la bande son via un petit lecteur mp3 + ampli/HP de façon manuel, j'ai sur cette bande son un bip de départ, dès que je l'entend j'appui sur la télécommande et mon anim se lance. J'ai testé pas mal de fois et ça ne pose pas de soucis de synchronisation, bon ok c'est du bricolage, mais je ne suis pas non plus au 1/10e de s près, toute façon le mouvement vertical de machoire que j'ai fait ne peut pas reproduire une véritable machoire humaine avec mouvements complexes.
Par contre j'ai aussi acheté un module mp3, est-ce qu'il serait facile de l'intégrer sur l'arduino pour remplacer mon bricolage de lecteur mp3 externe? si oui comment? est-ce qu'il faut des composants en plus de cette carte? c'est ce module là http://www.emartee.com/product/41540/MP3%20Sound%20Module%20Mini%20SD%20Card
#37382 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 07:36
dans
Modélisme et modèles réduits
Par contre la télécommande marche pas terrible, enfin plutot bizzarement, il faut appuyer sur le reset de la carte, sinon elle ne marche pas, puis elle arrive a lancer 2 fois l'animation, et si je veux la relancer une 3eme fois, il me faut refaire un reset de la carte. je ne sais pas si ça vient du materiel?
#37380 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 03:48
dans
Modélisme et modèles réduits
mais je vais essayer de travailler sur ton code de ce matin et essayer de comprendre les 0 des positions
je vais revoir ça tranquillement, parceque là je me mélange les pinceaux
#37375 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 02:55
dans
Modélisme et modèles réduits
#include <Servo.h>
Servo bras;
void setup()
{
bras.attach(3);
}
void loop() {
bras.write(10);
delay(1000);
bras.write(100);
delay(1000);
}là mes mini numeriques marchent, comme si ils n'acceptaient pas les valeurs extremes
#37374 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 02:50
dans
Modélisme et modèles réduits
#include <Servo.h>
Servo bras;
void setup()
{
bras.attach(3);
}
void loop() {
bras.write(0);
delay(1000);
bras.write(180);
delay(1000);
}et les servo standards futaba marchent bien, alors que les mini numeriques ne marchent pas
#37372 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 02:35
dans
Modélisme et modèles réduits
par contre j'ai retesté tes 2 premiers codes de ce matin (dont le 1er avec le code telecommande) mais là ça ne marche pas
j'ai testé aussi en alimentant la carte avec l'usb et aussi avec du 12v sur la Jack avec un accu lipo 3S 2000mah
donc niveau batterie je ne pense pas qu'il y ait un soucis, d'autant que j'utilise ce type de batterie dans mes planeurs avec beaucoup plus de servos
#37370 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 02:13
dans
Modélisme et modèles réduits
donc je vais retester avec tes premiers codes de ce matin et mes servos standard futaba
et dans mon pilote, il y a justement 1 servo mini digital et 2 autres vieux mini normaux, on va y arriver
#37365 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 11:44
dans
Modélisme et modèles réduits
aucune idée, ce sont des servo pour moi dit standards que j'utilise en modelisme, a la main on arrive a les faire bouger de butée a butée sur 180°, en général sur les catalogues ils sont donnés pour des courses de -/+60°Petite vérification, vos servos sont des servos 0° vers 90° ou -45° 0 45°?
#37360 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 10:54
dans
Modélisme et modèles réduits
mais presque a chaque remise en marche, comme sur la video tu verras que ça envoie direct les 2 servo bras et tete et rien d'autre
http://www.retroplane.net/data/test1.wmv
j'ai verifié et revérifié les branchement, tu penses que si j'utilises la même version du soft d'arduino que toi ça changera?
#37358 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 10:08
dans
Modélisme et modèles réduits
mais si je colle ton code dans la version anglaise d'arduino 1.0 là, la verification de code donne des erreurs
#37357 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 10:04
dans
Modélisme et modèles réduits
le bras va bien en haut, le delai de 4s s'ecoule mais il reste a sa position, il ne revient pas
ensuite la tete tourne d'un côté et puis c'est tout, il n'y a rien d'autre qui se passe, la tete ne revient pas et la machoire ne bouge pas
#37352 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 09:12
dans
Modélisme et modèles réduits
pour la tete, 0 c'est bien le neutre, tête centrée
#37349 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 08:53
dans
Modélisme et modèles réduits
j'appuie sur le bouton play (FFC23D) de la telecommande
servo bras se lève de 50°
servo bras reste en position levé sans bouger pendant 4s
servo bras baisse de 50°
pause de l'animation pendant 1s
servo tete bouge a gauche de 90°
servo tete revient au neutre puis bouge a droite de 60°
servo tete reste dans cette position à droite
servo machoire monte et descend de 45° pendant 10 fois
servo tete qui était à droite revient au neutre 0
l'animation s'arrête toute seule
**********
possibilité de relancer l'animation avec le bouton play de la télécommande
****************************
Voilà donc la base du scénario, je pense qu'après m'avoir fait un code propre, j'arriverais a rescenariser une animation complète,
merci
#37347 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 08:40
dans
Modélisme et modèles réduits
Ok je vais te donner mon scenario de départ et je pourrais comme ça repartir d'un code propre, je l'adapterais ensuite a mon scenario complet que je ne connais pas encore, car il me faudra l'essayer a chaque fois sur le pilote pour voir si c'est realiste.
#37345 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 08:00
dans
Modélisme et modèles réduits

#37344 Animation pilote dans une maquette
Posté par
sur 27 décembre 2011 - 06:53
dans
Modélisme et modèles réduits
-alors en ce qui concerne le code de Seb, il marche, mais à la fin de l'anim je ne peux pas la relancer à la telecommande, certainement à cause du while(1) que j'avais mis pour l'arrêt, et si je l'enlève j'ai le dernier servo bouche qui tourne en boucle sans pouvoir a^rrêter l'annim
-pour ce qui est du code de Yves, ça marche impec, content, juste 2 bricoles, a la fin compteur++; que j'ai reactivé, il y avait // devant. et le code telecommande que t'as mis FF30CF qui correspond a la touche1, ne marche pas, par contre en mettant le code de la touche play/pause FFC23D ça marche, vraiment bizarre, mais bon pas grave puisque c'est justement la touche dont je voulais me servir
Par contre, j'ai un gros problème à la mise en marche, que j'avais aussi constaté avant le code telecommande. Quand je mets sous tension la carte/annimation, j'ai les 3 servos qui partent d'au moins 30° vers la gauche et qui reviennent à 0 lorsqu'ils sont appelés par le code. Pour moi c'est un problème, ils ne doivent pas du tout bouger, car là ça tirerait sur les tringlerie hors de leur course et ça casserait tout.
Vous avez une idée de quoi ça peut provenir et comment résoudre?




