Contenu de dreamer
Il y a 15 élément(s) pour dreamer (recherche limitée depuis 02-mai 13)
Par type de contenu
Voir pour ce membre
#61194 Sous-marin
 Posté par
sur 07 août 2014 - 09:27
dans
Robots sous-marins bateaux et autres systèmes aquatique
Posté par
sur 07 août 2014 - 09:27
dans
Robots sous-marins bateaux et autres systèmes aquatique
#61173 Sous-marin
Posté par
sur 04 août 2014 - 09:58
dans
Robots sous-marins bateaux et autres systèmes aquatique
 />
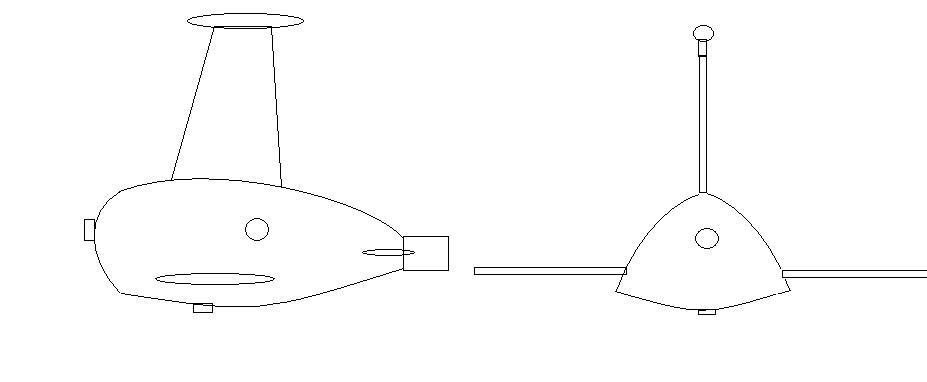
/> La coque : je pensais la faire sur une base daluminium. A paris il y a un fournisseur de matériaux et je je pense que si je le fais en 5 mm dépaisseur renforcé par des cornières carrés toujours en allu ça devrait être bon . Ne sachant pas souder ce matériaux (compliqué et cher) je pense que je visserai les plaques sur une ossature . L'étanchéité sera faite avec de la résine. Pour les trappes de visite ce sera du silicone.
Les ailerons horizontaux devraient servir à faire "planer" le robot durant la descente. Le but étant de filmer et de se balader tranquille. Je ne sais pas quel doit être le poids au cm2 pour que les ailerons soient assez portants , mais ne créant pas trop de traînée. Laileron vertical aura 2 fonctions : la première en haut il y a un flotteur qui fera office de quille à l'envers . Elle donnera la stabilité à l'ensemble, mais effectivement va créer elle aussi de la traînée. C'est aussi pour maffranchir un peu délectronique qui peut tomber en panne. Son 2 éme rôle est lorsqu'il refera surface de pouvoir le localiser plus facilement (leds clignotantes ou couleur fluo ...) et de le récupérer plus facilement (préhension).
Le couplage magnétique : je te rejoins sur ce point car je pense qu'il va poser plus de pb que d'en résoudre.
La propulsion : Je pensais à un propulseur assez puissant à l'arrière et 2 ou 3 propulseurs d'étraves pour les autres axes .
Il y a la question de la pression compensée soit à base d'huile ou de gaz. Je n'ai pas assez d'informations déjà de savoir si c'est une bonne idée, et ensuite si c'est faisable et comment et avec quoi. Peut être d'autres forumistes auraient des pistes ??
Merci pour tes idées sur les caméras, je vais regarder de ce côté, ce qu'il se trouve.
Pour mon compte je commence à avoir des idées plus précises grâce à tes interventions. Rien n'est encore figé dans le marbre .
Je vous dis à dans une semaine bien cordialement
#61167 Sous-marin
Posté par
sur 03 août 2014 - 10:18
dans
Robots sous-marins bateaux et autres systèmes aquatique
 />
/> 
Après question caméras si j'arrive à résoudre le pb du stockage des données, les caméras de surveillance me paraissent très adaptés à ma situation. Elles peuvent enregistrer en très faible lumière, certaines sont assez petites et les prix semblent corrects.
Après il va falloir que vous m'aidiez pour que toutes ces idées puissent être robotisés , que les enchaînements se fassent dans le bon ordre quels capteurs pour quels fonctions ? ......
Voila pour mes cogitations, j'attends vos conseils vos remarques et critiques avec intérêt. Merci d'avance
#61152 DESSIN EN 3 D
Posté par
sur 01 août 2014 - 09:46
dans
Programmation
Voila je voudrais avoir vos avis pour débuter en dessin 3D. J'ai des plans à réaliser mais débutant dans l'affaire je ne sais pas trop comment les réaliser. Merci
#61150 Sous-marin
Posté par
sur 01 août 2014 - 06:25
dans
Robots sous-marins bateaux et autres systèmes aquatique
CordialementLes tubes d'etambot sont une solution "officielle", à savoir un standard.
Maintenant, le problème c'est de s'en procurer à prix correct!
J'ai trouvé des pièces de bateau télécommandé sur hobbyking (au moins les hélices propulsives), mais pas forcément tout.
Pour l'instant je n'ai pas regardé les prix. j'en suis encore qu'à la conception, mais la question va arriver assez vite.
La solution de la bouteille sous pression est ingénieuse, cependant, il faudra du coup un moyen de gérer la pression, donc un manomètre,
puis une sonde de pression interne et une sonde externe (ou un profondimètre en fait, puisque pression =f(profondeur) ^^
Je suis un adepte des élément simples. Donc en fait je pensais très simplement mettre un petit piston qui appuie sur une valve et lâche la pression dans l'appareil. Dans le mouvement inverse juste une valve à même la coque qui relâche la pression. Si je n'ai pas trop de différence entre l'intérieur et l'extérieur, je ne devrais pas avoir trop de pb d'étanchéité, à essayer ....
Le couplage magnétique est une solution intéressante, j'en étais parvenu aux mêmes conclusions, et en plus je pense que ce n'est
pas si dur à faire, en revanche avec un rendement plus faible à cause des pertes, j'imagine. Mais ça permet de garder le moteur
en partie sèche simplement/>/>/>/>
A priori je pense que les pertes ne doivent pas être trop importantes. Car le jeu est que les aimants ne touchent rien ! Donc pas de frottement . Mais le pb qui ne va pas être simple à résoudre, c'est que l'aimant doit avoir un bon diamètre pour accepter le couple, donc ça suppose une surface plane entre les 2 aimants assez importante ... qui n'est pas compatible avec un sous-marin qui par principe à des formes rondes voir cylindriques ! Donc c'est un choix à faire dés la conception des formes.
Au passage, j'ai fait plein de remarques, mais ça dépend en fait du budget
Pour ma part, je souhaitais tenir un coût de l'engin faible (moins de 200, mais il
n'était pas destiné à de telles profondeurs
un gros budget, il "suffit" de trouver les bons composants
Comme je pense faire ça tranquillement sur en gros une année (pour l'été prochain) j'aurais peut être un budget plus important (400 ?) Mais je sais que dans de telles opération tout les frais montent très vite . Donc je vais être aussi obligé de regarder de près les tarifs. Il y a aussi la solution du mutualiser si cela intéresse plusieurs d'entre vous. On peut imaginer un robot sous-marin avec plusieurs compétences pour que tout le monde y trouve son compte ? Il y aussi l'avantage dans le cas de la mutualisation, c'est qu'on travaille avec des compétences de chacun, un saura faire des soudures, un sera un expert de lélectronique .....
au passage, une discussion intéressante sur les openrov : http://openrov.com/forum/topics/crush-depth-of-tubing
Une solution proposée est de baigner lintérieur du sous-marin dans une huile non conductrice.
A moins d'un changement de phase, celle ci est à priori incompressible et compense donc la pression externe, comme un objet plein en fait
Mais comment ils le disent (merci au passage à google traducteur) à la fin du fil , l'huile est une bonne idée sur le principe, mais il y a de nombreux composants électronique qui contiennent des bulles d'air et qui du coup risquent de faire exploser le dit composant. Rien n'est simple dans ce bas monde !
#61147 Sous-marin
Posté par
sur 31 juillet 2014 - 12:50
dans
Robots sous-marins bateaux et autres systèmes aquatique
Voila quelque idées jetés pelle-mêle , qu'en pensez vous ? Merci d'avance, et moi j'avance justement.
 />
/>
#61144 Sous-marin
Posté par
sur 30 juillet 2014 - 04:23
dans
Robots sous-marins bateaux et autres systèmes aquatique
#61141 Sous-marin
Posté par
sur 30 juillet 2014 - 12:18
dans
Robots sous-marins bateaux et autres systèmes aquatique
http://www.humanoides.fr/2013/01/03/openrov-drone-sous-marin-open-source/ ou ça :
http://www.ecolinefrance.com/fr/produits/mini-rovs
Faut être un peu riche , mais ça existe.
Cdlt
#61135 Sous-marin
Posté par
sur 28 juillet 2014 - 09:53
dans
Robots sous-marins bateaux et autres systèmes aquatique
Merci et bons bricolages à vous
#61134 Sous-marin
Posté par
sur 28 juillet 2014 - 08:49
dans
Robots sous-marins bateaux et autres systèmes aquatique
Dans le monde du modélisme tu trouvera tout ce qu'il te faut pour cela ... Une radiocommande 10 voies, un récepteur 10 voies, et un couple émetteur + récepteur vidéo
/>/>/>/> En tout cas l'idée de la bouée est très bonne pour plusieurs raisons ( voir où est le sousmarin, le récupérer en cas de panne etc... ) même si elle a aussi ses défauts ( lié au courant, aux algues, aux mouillage etc... )
Effectivement mike118 dans le modélisme, que je connais de très loin, il y a pas mal de choses. Mais mon pb est de faire naviguer à une certaine profondeur mon robot. Donc les fréquences utilisés en radio commande vont bien dans un petit bassin pour une démonstration. Après ... ce n'est plus possible. Donc je dois trouver une autre façon de faire. D'où mon idée d'utiliser une liaison infrarouge transmise par fibre optique.
Ça c'est le premier pb. Le deuxième est de faire un retour d'image pour voir ce qu'il se passe et c'est même le plus intéressant de l'opération. Et là j'ai vraiment pas de grosse idée si non que de réutiliser encore une fois une fibre optique mais comment ?
Quand je parle de machine , j'entends pas là, soit de petits jouets soit roulants; soit androïdes, soit des bateaux. L'essentiel soi qu'il y ait un nombre suffisant de mouvements que je puisse réutiliser. C'est en plus souvent moins cher que d'acheter en pièces détachés. Et surtout il y a déjà cette liaison. A moins que de faire comme disait mike118 dans le modélisme mais comment transformer mes ondes en message transmissible par fibre ?Que sont ces "machines" dont tu parles ?
Merci en tout cas à vous de m'aider dans mes réflexions.
#61128 Sous-marin
Posté par
sur 27 juillet 2014 - 08:10
dans
Robots sous-marins bateaux et autres systèmes aquatique
Et comment faire pour renvoyer une petite image sur un écran ? Merci bonne journée
#61122 Sous-marin
Posté par
sur 26 juillet 2014 - 08:51
dans
Robots sous-marins bateaux et autres systèmes aquatique
 /> />
/> /> Une autre idée qui me passe par la tête serait de libérer le robot sous-marin de tout fil. Comme les ondes passent très mal dans l'eau de mer , la solution serait peut être de faire descendre le robot au bout de son câble, arrivé sur site il se libère. Au bout du câble il y aurait un émetteur basse fréquence (car je crois que c'est ce qui se propage le mieux en milieu aquatique)qui guiderait le robot. Ce qui obligerait aussi a ce qu'il ait un émetteur pour renvoyer l'image. Pour le retour il libère un lest et remonte seul.
L'avantage c'est que même si le câble est en fibre et que le robot est à - 100 m il doit le tirer , pour peu qu'il y ait un peu de courant marin, il sera obligé de dégager énormément d'énergie juste pour tirer son fil.
Linconvénient c'est que ça complique pas mal l'affaire .
Qu'en pensez vous ? Merci pour vos avis.
Cdlt
#61120 Sous-marin
Posté par
sur 25 juillet 2014 - 01:21
dans
Robots sous-marins bateaux et autres systèmes aquatique
En fait en y re-réfléchissant, je me suis dit qu'il faudrait en fait que je fabrique un émetteur en proportionnel, qui passe par la fibre optique et un récepteur qui gérera les 8 ou 10 servos de mon futur robot sous-marin.
Donc est ce q'un émetteur à infrarouge est le mieux adapté à la fibre optique ? Est ce qu'une lumière blanche n'aurait pas un pouvoir passant plus puissant ? Merci d'avance pour vos avis .
Cdlt
#61118 Sous-marin
Posté par
sur 24 juillet 2014 - 09:02
dans
Robots sous-marins bateaux et autres systèmes aquatique
Alors qu'en pensez vous ? Est-ce raisonnable ? Est-ce faisable ? Ou puis-je trouver un petit robot à 10 mouvements ? Une petite caméra qui pourrait être elle aussi traficotée ? Merci d'avance pour vos réponses et vos avis (même si je suis traité de doux rêveur !) :-)
#61116 PRESENTATION
Posté par
sur 24 juillet 2014 - 04:23
dans
Et si vous vous présentiez?
Comme beaucoup d'entre vous, j'ai rêvé de créer, de fabriquer des machines plus ou moins autonomes. Mais étant une quiche en math et physique ma vie professionnelle c'est orientée vers du commercial. Maintenant j'ai un peu plus le temps et les moyens pour me lancer un peu plus sur le sujet. J'espère qu'avec votre aide j'arriverai à faire quelques truc .
bonne journée




