Posté par
Posté par
J'édite totalement le premier post avec des vidéos de démo plus parlantes. C'est un résultat inespéré de pouvoir faire du SLAM (cartographie et localisation simultanées) parfaitement fluide sur un uC Arduino-like 80MHz du coup cette modif va donner un petit coup de vieux aux posts suivants:) Le SLAM est le résultat de notre travail avec Mike118 sans qui il n'existerait pas.
Vidéo avec pilotage web simultané de plusieurs robots chez moi :
Vidéo de Mike118 pour Vigirobotics.com avec la démo de notre algorithme de SLAM
Et enfin l'accès réel via le cloud Vigibot.com qui est une copie officielle de ma page sur serveur perso d'origine.
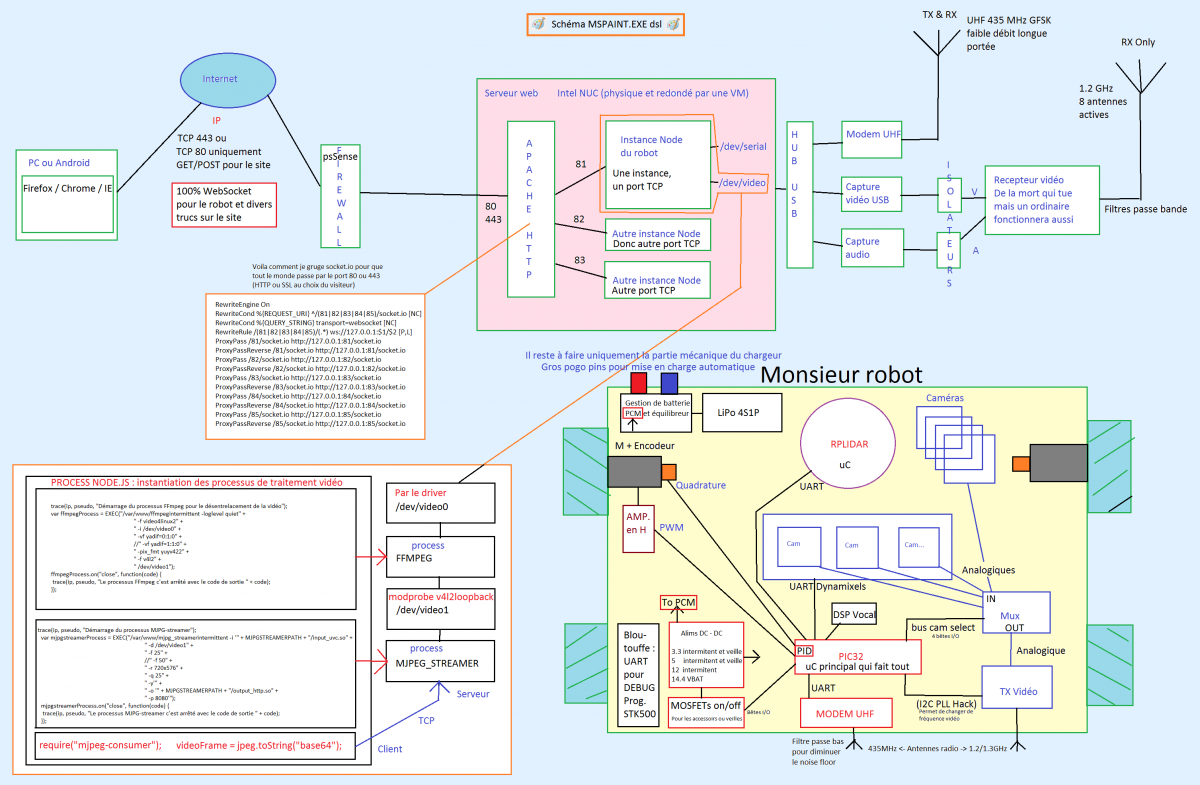
Ce "widget" donne accès a mon premier robot, il s'appelle "Radiobot" car c'est le seul de la flotte à disposer d'une liaison UHF longue portée "non-Wi-Fi" et aucune carte embarquée Linux à bord comme tout les autres :
Les autres robots sont sur www.vigibot.com qui sera bientôt en libre accès avec un fichier open-source pour faire rapidement un robot pas cher à l'aide d'une raspberry PI et de servomoteurs.