 Posté par
Posté par
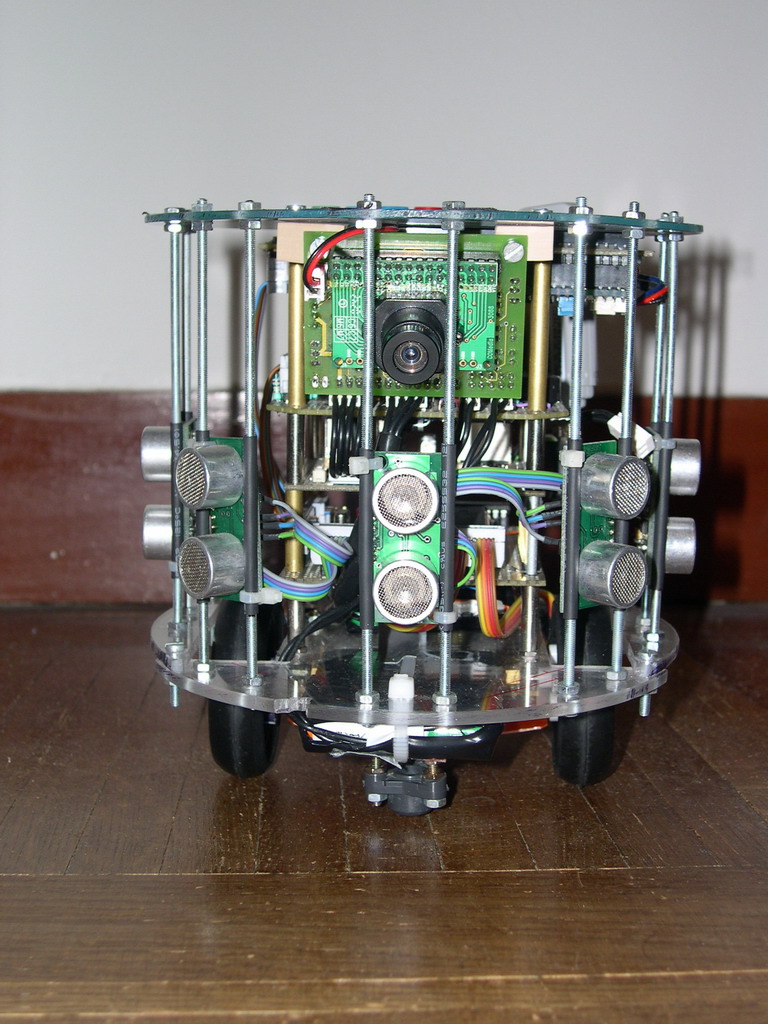
Je vous présente ma réalisation: BOB. C'est un petit robot que j'ai réalisé 100% tout seul. Il est conçu pour évoluer en intérieur, cartographier un environnement, se déplacer de manière autonome en évitant les obstacles...
Il est réalisé à base de FoxBoard, une carte mère sous Linux, et équipé de WiFi.
Pour plus de détail, c'est ici:
http://ze.bot.free.fr/
N'hésitez pas à laisser vos questions ou vos commentaires.
Leon.













{kind=link}