Ce petit robot (55,9 × 45,7 × 30,4 cm) à chenilles peut déplacer une caravane de 4 tonnes :
Mais c'est cher.
https://trailervalet...ASAAEgKvMvD_BwE
D'autres “Camper Trolley” existent.
Il y a 481 élément(s) pour Ulysse (recherche limitée depuis 03-mai 13)
 Posté par
sur 30 mars 2018 - 03:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 30 mars 2018 - 03:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ce petit robot (55,9 × 45,7 × 30,4 cm) à chenilles peut déplacer une caravane de 4 tonnes :
Mais c'est cher.
https://trailervalet...ASAAEgKvMvD_BwE
D'autres “Camper Trolley” existent.
Posté par
sur 24 juin 2018 - 05:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour Levend,
j'ai aussi testé, c'est plus de la signalisation que de l'éclairage. Mais ça fait pas vilain sur un rover d'extérieur, on dirait 2 yeux dans la nuit.
Posté par
sur 07 octobre 2017 - 09:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
Hâte de le voir en action. N'oublie pas l'arrêt d'urgence :-)
Posté par
sur 26 novembre 2018 - 06:59
dans
Robots roulants, chars à chenilles et autres machines sur roues
Le rendu est superbe. Faut pas lâcher la réalisation.
Posté par
sur 30 octobre 2017 - 10:46
dans
Général
Posté par
sur 03 février 2018 - 07:14
dans
Général
Allez ! Une petite promenade sur Mars.
Curiosity reste ma plus forte source d'inspiration et de motivation. Un modèle.
Posté par
sur 11 novembre 2018 - 05:57
dans
Général
Vroum vroum (la face cachée du Rhum)
Posté par
sur 19 septembre 2017 - 02:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
2 à votre avis peut on faire en sorte via du code de placer une sorte d’interrupteur, car si je les vis directement et bien ils s'allument en continue. Dans l'idéal il serait bon de pouvoir les actionner quand on veut, et via aussi un capteur de luminosité... qu'en pensez vous ?
Visiblement ce sont les 2 vis de fixation qui assurent l'alimentation des LEDs infrarouges. Pour réaliser une mise sous tension à la demande, ça passe par une modification du circuit électrique, savoir placer un circuit interrupteur sur l'alimentation des LEDs.
Sinon oui, les LEDs haute luminosité chauffent, on ne peut pas mettre le doigt dessus.
Posté par
sur 04 octobre 2017 - 09:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
yes, ce sont des "Onboard photoresistor to detect ambient light".
Posté par
sur 05 octobre 2017 - 05:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
4 - le but serait de dessouder les deux capteurs pour en avoir qu'un, et par la suite pouvoir programmer ce capteur qui actionnerait les IR à une valeur donnée et non comme il fait actuellement selon la luminosité les IR sont plus ou moins allumés même avec la caméra hors service.
Autre solution : remplacer les 2 photorésistances par un petit montage "switch analogique + résistance" commandé en tout ou rien par un signal logique. On / OFF.
Posté par
sur 11 novembre 2016 - 09:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Par contre, je ne sais pas quoi placer pour les caméras, genre une pour la reconnaissance (sans la vision stéréoscopique), et l'autre pour le TOF (je crois que j'en avais déjà parlé de cette idée), cela me parait intéressant, le hic, c'est niveau matériel, quoi prendre ???
A ce niveau tout dépend du but recherché et du budget.
Les sous...hélas toujours les sous ... :kez_13:
Posté par
sur 18 octobre 2017 - 08:39
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
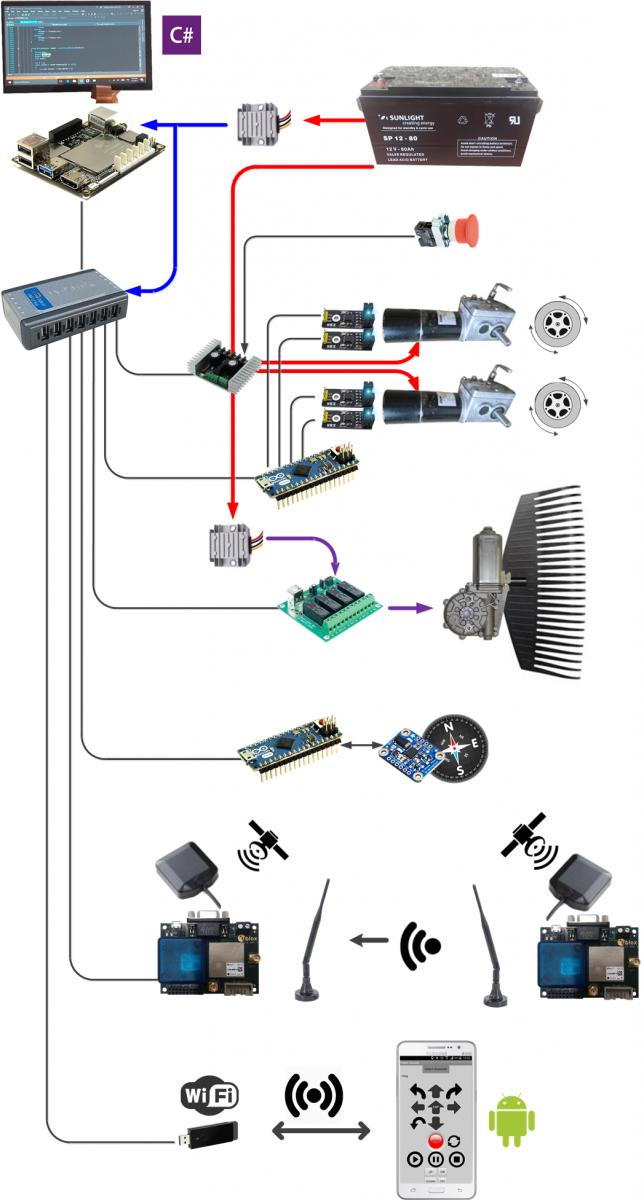
Un exemple de ce qui se fait : une unité centrale reliée à des périphériques (capteurs et actionneurs ). Chacun son rôle.
Posté par
sur 12 juillet 2017 - 09:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Depuis la programmation en C#, adieu les * pointeurs, bonjour les objets.
Posté par
sur 12 juillet 2017 - 07:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hein!!?? C'est quoi ça????
Par exemple un pointeur qui n'est pas libéré.
Posté par
sur 07 février 2017 - 03:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 12 novembre 2016 - 11:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui, très bon ça la Kinect.  Quelqu'un sur le forum aurait une réalisation pratique à présenter ? un tuto ?
Quelqu'un sur le forum aurait une réalisation pratique à présenter ? un tuto ?
Posté par
sur 13 mars 2017 - 08:52
dans
Bras 6 axes BCN3D Moveo
Suis fan de ce sujet.
Posté par
sur 10 mars 2017 - 11:11
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 18 mars 2017 - 10:24
dans
Bras 6 axes BCN3D Moveo
Bizarrement, cette dernière vidéo d'un joli corps m'a convaincu de l'utilité d'une imprimante. 
Mais le bras est très bien aussi !
Posté par
sur 20 septembre 2017 - 08:21
dans
Bras 6 axes BCN3D Moveo
peut-on récupérer les signaux des moteurs pas à pas pour pouvoir apprendre des mouvements au robot en le bougeant manuellement ?
Franchement non, même si la bobine du moteur génère une suite de pics de tension lorsqu'on fait tourner son axe ( effet dynamo ) ça n'est pas exploitable.
Mais on peut placer un codeur sur l'arbre du moteur.
Posté par
sur 22 mars 2017 - 10:29
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 27 mars 2017 - 08:37
dans
Bras 6 axes BCN3D Moveo
Aujourd'hui c'est coulage du Plomb pour la base du Bras robot.
Vulcain est parmi nous !  Excellent.
Excellent.
Posté par
sur 31 mars 2017 - 09:46
dans
Bras 6 axes BCN3D Moveo
2 X 37 ça se fait bien (connecteur bien tenu dans un étau, une 3ème main..).
Retour d'expérience : attention au sens ! ( pin 1 mâle -> pin 1 femelle) , on se trompe très souvent.
Capot plastique pour la finition ?
Posté par
sur 17 février 2017 - 04:23
dans
Impression 3D et Imprimantes 3D
Personnellement j'utilise ce type de fixation :
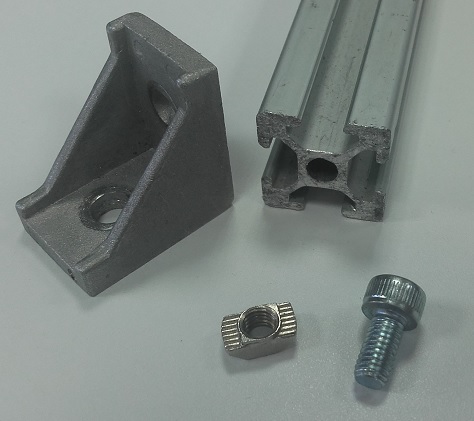
C'est bien pratique pour la bricole.
Posté par
sur 14 février 2017 - 01:44
dans
Impression 3D et Imprimantes 3D
Avec du profilé de 20x20, je me demande si la structure va être assez rigide.
Ca l'est. Pablo est aussi en profilé 20x20. Quand je me suis vautré dessus de tout mon long hier soir c'est moi qui ai morflé, lui n'a pas bougé




