Magnifique ! 
Contenu de yougo
Il y a 235 élément(s) pour yougo (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#82358 Bras robot BCN3D Moveo de Donovan
 Posté par
sur 17 avril 2017 - 09:47
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 17 avril 2017 - 09:47
dans
Bras 6 axes BCN3D Moveo
#85554 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 03:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
voila, j'ai fini de placé tous les servomoteurs, ils ne bougent pas, normal je n'ai rien fait pour qu'ils bougent (sauf 2) qui font un mouvement continu de 45° à 0° environs je ne sais pas trop pourquoi ...
Auriez vous un conseil pour faire bouger les servomoteurs à sa guise ? 
#85550 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 02:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
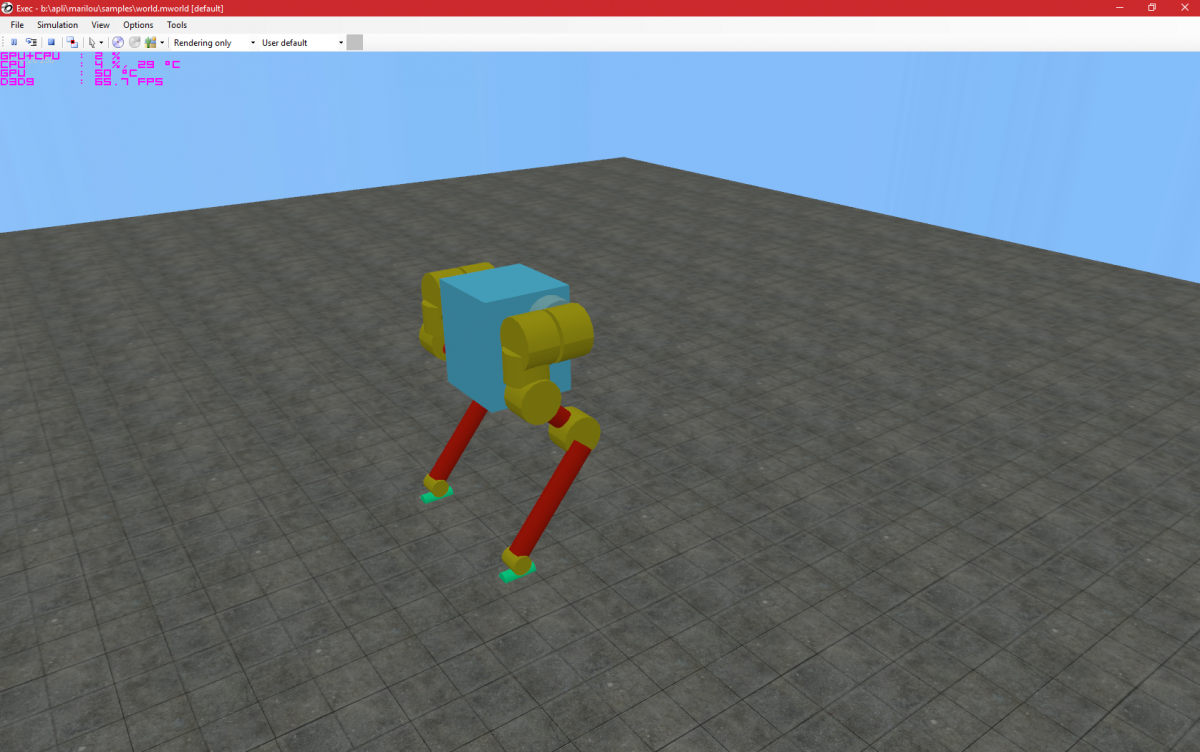
C'est pas ouf, mais c'est le 1er essai.
Il faut encore que je change des dimensions car la beaucoup ne sont pas les mêmes que sur les plans , mais bon je me forme encore ce n'est qu'un test
Image(s) jointe(s)

#85436 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 03:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Forthman déjà tu peux t'informer sur le projet ici :
https://fr.ulule.com/robot-walk-e/
comme tu peux le voir il y a beaucoup de contreparties 
Du coté faire les preuves c'est exact, mais comme j'ai déjà dit, on a déjà étudié beaucoup d'aspects avec toutes les pièces 3D ect , le seul truc que l'on a pas fait (et ça à l'air de vous faire grincer) c'est les simulations informatiques, simplement car on ne sait pas comment ça marche, mais ne vous en faites pas je ne suis pas contre ou quoi, c'est juste que je n'ai jamais fait ça , et se former ça prend un temps fou...
Niveau sponsors on à déjà ce qu'il nous faut pour ce projet la, mais comme tu le dis, on attend de finir pour pouvoir chercher des sponsors pour des choses plus complexes.
Vous avez l'air de vous inquiéter beaucoup, ne vous en faites pas, on ne dit pas qu'il n'y aura pas quelques échecs, mais on a tout fait pour minimiser leur nombre
#85824 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 14 juillet 2017 - 09:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oracid , oui le servo est le asme-03A donc 24V et j'ai acheté exactement à ce lien la  j’espère juste que le délai n'est pas si long ...
j’espère juste que le délai n'est pas si long ...
il y a 5 articulations par jambes en fait , seulement 2 pour la hanche,je ne vois pas trop ou tu vois une double hanche, mais c'est vraiment dur a expliquer de façon écrite ... j'ai fait une mini présentation pour l’apéro-bot Toulouse , j'en parle normalement et on a filmé donc je vais essayer de le mettre par ici.
dans une ancienne vidéo que je fais sur blender on voyait bien que les 2 articulations permettent une très grand liberté de mouvement
https://www.youtube....h?v=UgbziD1ECw0
pour ce qui est des deux articulations, elles ne font pas du tout la même chose, je m'explique :
le premier servo en partant du haut , fait bien ce que tu dis "basculer la jambe d'avant en arrière selon un axe horizontal latéral."
petit schéma en vue latérale :
-en rouge = servo
-blanc = articulation libre
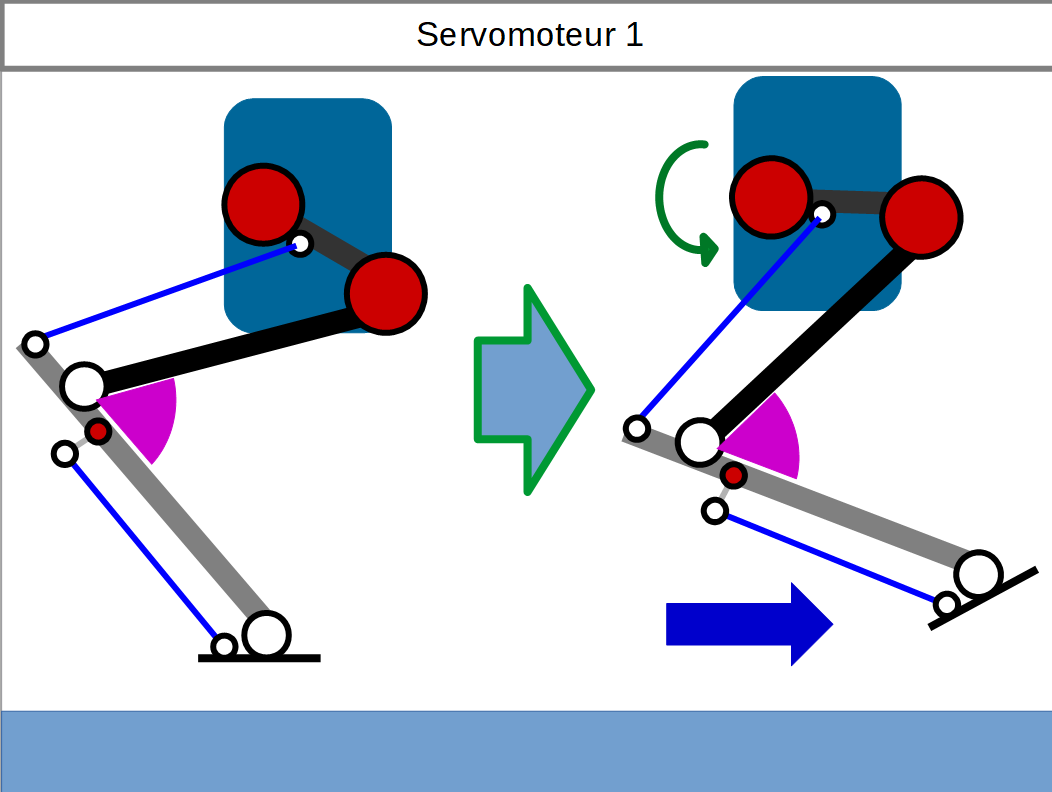
mais le second, et c'est la qu'est toute l'astuce de cette structure ne fait pas du tout la même chose, en fait si on l'actionne, par effet levier (grâces aux tiges bleu qui ne se déforment pas) on va réussir à lever la jambe , et donc le mouvement qu'engendre ce servo est en fait un élèvement VERTICAL du pied comme ceci :
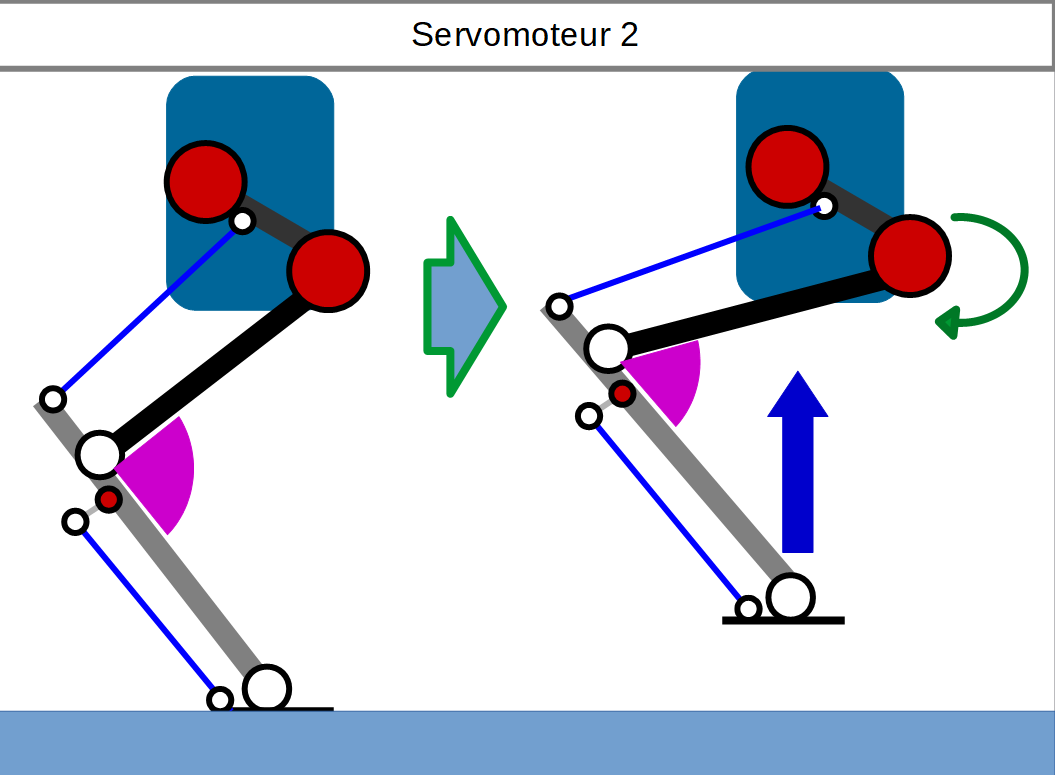
donc avec 2 servos on peut placer la jambe comme on veut sur ce plan et ça a en plus plein d'avantages 
#85547 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 juillet 2017 - 12:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'avais peur d’être perdu pour la modélisation sur ce genre de logiciels mais en fait ça va c'est plutôt facile. maintenant il faut que je voie comment on fait pour faire l'animation, car c'est bien beau d'avoir une structure mais j'aimerais lui faire faire quelques pas
#86905 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 22 août 2017 - 06:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On a fini a 100% le robot, maintenant on bosse le code !
Voici quelques photos pour le fun :
(prises avec un portable déso)
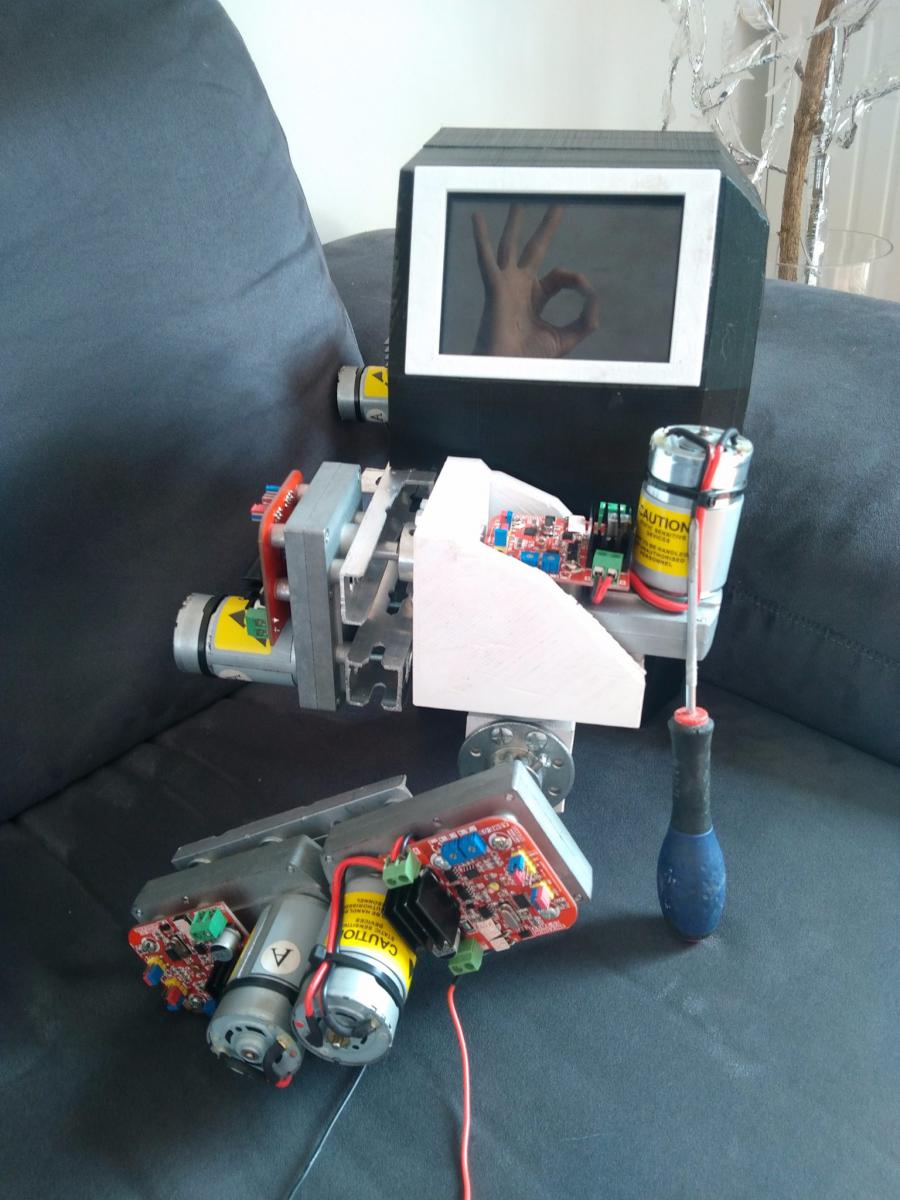
ici l'intérieur :

donc qui contient :
+raspb
+ arduino mega
+arduino nano
+ voltmètre
+relais
+ écran Oled
+ gyro/accéléromètre
+ Modules abaisseurs de tension
+Batterie
(juste ici )

l’extérieur est pas mal je trouve :

et comment on veut le tester : (oui oui c'est bien une tyrolienne )

#111457 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 19 octobre 2020 - 11:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Updates:
Après pas mal des tests pour avoir une marche qui est relativement stable et qui ne risque pas trop de détruire le robot je commence à avoir des résultats corrects (perfectibles mais corrects), pour rappel tout le contrôle du robot est 100% réalisé par un réseau de neurones entrainé grace à des méthodes de reinforcement learning comme expliqué plus haut.
Pour l'instant j'ai donc deux modes le mode "standby" qui maintient le robot au même point, et le mode "waypoint" qui amène le robot à un point [x, y], sur terrain plat pour le moment.
Ça fait du bien de voir le "bout tu tunnel" (il est encore long) je commençais à plus trop y croire honnêtement...
J'ai refait tout le design du robot entre-temps car il était pourri ça fera l'objet d'un autre post pour les curieux le code tourne sur jetson nano. Dans tous les cas je pense garder les pieds ronds, c'est certes plus dur mais ça me permet d'étudier le deep learning au service de la marche dynamique à son paroxysme, je peux déjà tranferer ce que j'ai apris pour faire marcher n'importe quel quadru via le reinforcement learning.
Je vais donc tester en vrai maintenant (tout en continuant d'améliorer les résultats en Sim), je prévois des difficultés énormes pour passer de la simulation à la réalité il va donc encore falloir patienter quelques mois pour la prochaine update mais je m'acharne. 
#112431 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 07 janvier 2021 - 09:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Honnêtement je regrette beaucoup avoir fait un financement participatif pour ce projet, cela me pose plus de soucis que de creer le robot en lui-même. Pour ce qui est des récompenses, je sais très bien que rien n'a ete fait et la vérité c'est que pour le moment je suis dans l'incapacité totale de répondre aux promesses qui ont été dites. Comme je l'ai dit à certains d'entre vous en prive cela me tracasse beaucoup personnellement d'un point de vue ethique. Dans tous les cas comme tu le dis Mike il est fortement probable que les récompenses n'arrivent pas avant les premiers pas du robot et je m'en excuse.
Pour finir sur un point plus positif, je suis en train de fortifier le réseau de neurones en vue des tests grandeur nature, voici un exemple de walk-e tenant debout sur un pied sur un terrain géneré aléatoirement avec une friction entre ses pieds et le sol aléatoire :
#89907 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 12 novembre 2017 - 01:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut les Makers,
Je vous joint ici la vidéo de Walk-e qui se tient debout, je tenais à vous le montrer en avance (avant qu'on tourne une vrai vidéo) car je suis plutôt content :
https://twitter.com/Projet_WALK_E/status/929489323371716609
Ceci grace à une MPU6050 tout à fait basique qui permet de faire les corrections en direct sur le robot
Vous pouvez noter la barre en metal qui traverse Walk-e, c'est en fait pour y accrocher les cables (en vert)
qui eux memes sont reliés au portique (blanc).
Ils permettent de le rattraper au cas ou il tombe (ce qui est arrivé quand meme pas mal de fois je vais pas vous le cacher hein )
Mais en aucun cas on soulage le poids du robot avec les cables verts, ils sont totalement lâche.
Pour information le robot est donc capable de lever son poids , mais en plus de ca une charge utile, pour l'instant je n'ai pas déterminé
combien exactement, mais en y accrochant sur la tette 3 bouteilles de lait (oui bon on fait avec ce qu'on a) il bronche pas.
[les bouteilles font 1L donc je suppose que ca fait du 3Kg]
Voila c’était les news du week-end
#86910 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 22 août 2017 - 06:42
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui tu as raison sur se fait, maiiiiiiiis pas de soucis on va y arriver, on en veut !
Ca va... si tout le monde faisait que des compliments on irait dans le mur hein, surtout que c'est des critiques constructives, donc en vrai ça fait réfléchir, il y a pas de soucis
#86907 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 22 août 2017 - 06:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ahahah oui pas de soucis je sais bien ! mais bon ça fait plaisir de voir le robot assemblé pour la première fois
Niveau pied c'est ce qui est prévu, mais on teste plein de trucs encore.
pour la simu, si, mais juste pour la méca et les dimensions , pour l'algo , on a vraiment pas le temps de le faire (30J) donc on va tester de faire une marche non dynamique pour le début, comme ça on aura au moins un truc pour la robot race !
#85431 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 02:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Vous commencez à me convaincre, je vais installer un outil de CAO pour tester, un des gros frein que je me suis mis avec ça, c'est que je n'ai jamais utilisé la CAO donc ça serra une première...
Dans mon imagination je mettrais plus de temps à faire la conception par ordinateur (apprendre tout un nouveau logiciel) que d'essayer de faire une pièce de nombreuses fois en 3D (en fait on a plein de PLA qu'on a exprès pour tester des proto, avec nos sponsors on a le filament gratuit donc pas de soucis si on doit faire 10 fois une pièce avant d'y arriver)
#85429 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 01:00
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Donc avant de partir, NON on ne vas pas faire tout en simulation dès le début calmez vous, on va faire de la simulation, mais APRES avoir fait le robot, ou peut être de temps à autres pour vérifier des paramètres, mais il est hors de question de tout faire en simulation.
La simulation c'est surtout pour trouver les paramètres d'un réseau de neurone qu'on voulait le faire, on a vraiment pas le temps de tout faire en simulation.
Pour l'impriment on va se rabattre sur autre chose car je crois aussi qu'il est obligatoire d'en avoir une pour réalisé des essais.
Sachez juste que pour l'instant le payement n'est toujours pas la donc on ne peut rien acheter.
#84736 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 15 juin 2017 - 06:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
les hx711
https://www.amazon.f...0?ie=UTF8&psc=1
(ils sont utiles car la variation des cellules est tellement faible qu'arduino ne le détecte pas un si petit seuil)
les cellules
https://www.amazon.f...0?ie=UTF8&psc=1
ATTENTION J'ai choisi du 50Kg car le robot est lourd , il est peut être judicieux de voir plus petit
Une astuce : les cellules a 3 fils comme les miennes sont chiantes à câbler, si vous ne voulez pas vous embêter prenez avec 4 fils
#84337 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 03 juin 2017 - 07:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui ça peut être utile car le sujet semble flou pour beaucoup de monde (dont moi il y a pas si longtemps)
Mais si il y un seul truc que je devrais dire : c'est pas simple que vous pouvez l'imaginer ! Je ne dis pas ça pour vous faire peur au contraire lancez vous, mais ne sous estimez pas le travail qu'il y a derrière
#84334 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 03 juin 2017 - 07:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonne question !
Alors le choix du site est très très trèssss important pour les financements participatifs, donc si tu veux faire un choix voici ce qui nous a tourner ver Ulule :
-C'est intuitif,je trouve que la page est plus claire que kickstarter.
-C'est le meilleur en Europe, c'est un plus je trouve pour des projets de petites envergures qui n'ont pas une com assez monstrueuse pour faire de l'international.
Ok kickstarter c'est le meilleur dans le monde , mais en France Ulule le domine.
De plus le fait que ce soit en français c'est pratique pour les personnes de ton entourage (qui ne sont pas à négliger car c'est eux qui font qu'un projet décolle ou pas) .
-Tu es suivie par une équipe super sympa (ça je ne le savais pas avant d'essayer ) .
-Je trouve que sur Ulule il y a moins de projets énormes qui écrasent la visibilité des autres comme sur kickstarter.
-Ulule avait quand même l'air vachement moins austère pour les petits projets que kickstarter.
Donc voila mes arguments pour Ulule je dis pas que c'est le meilleur
sachez quand même que le sujet technologie est celui qui est le moins financé dans le monde du crowdfunding (environ 40% de réussite) .
#84157 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 29 mai 2017 - 08:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut à tous les Makers !
Après une petite absence due à la préparation du projet, nous y sommes enfin ! Notre projet de robot bipède est en financement participatif sur Ulule

Certains le savent déjà mais nous préparons la création d'un robot bipède depuis longtemps, notre idée est de vous partager cette création sur une chaîne YouTube pour, on lespère, vous aider et vous inspirer pour faire des projets de plus grandes envergures !
(les vidéos seront sur le style "colinfurze" ou "the hacksmith" pour les connaisseurs )
Donc si vous souhaitez nous soutenir et participer à laventure ou juste en savoir un peu plus c'est juste ici :
https://fr.ulule.com/robot-walk-e/
La chaîne YouTube :
Avant de finir quelques petits détails qui me semblent importants pour être transparents avec vous :
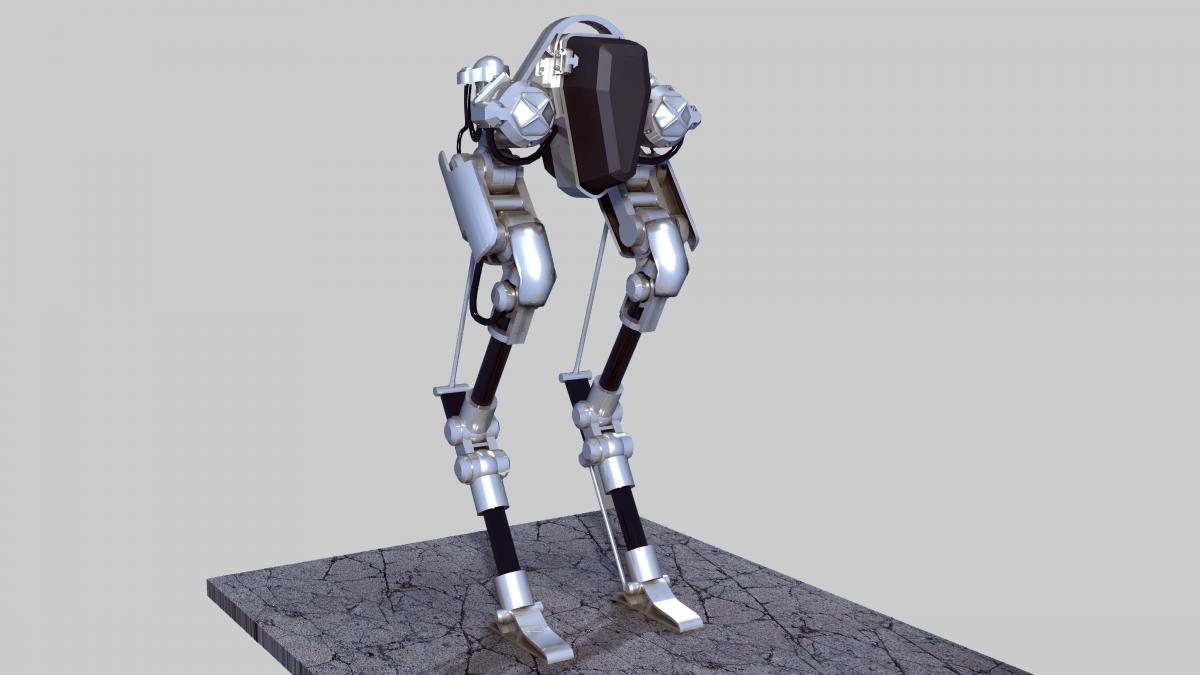
Premièrement les visuels que vous pourrez voir sont principalement là pour épater et faire joli.
Réalisées par notre graphiste (qu'on embrasse d'ailleurs et qui nous a fait un très beau travail. merci Andrianasolo Thierry !) les images que vous pourrez voir sont là pour montrer le concept général aux non connaisseurs.
Et comme vous pourrez le voir ce projet est très inspirer par le robot Cassie nous n'allons pas ce le cacher.
[Pour les curieux:
évidement pour être en règle au niveau de la loi mais aussi par simple respect nous avons contacté l'équipe d'ingénieurs qui est actuellement sur le vrai projet Cassie , et ceux-ci nous ont répondu qu'il n'y avait aucun souci (Sisi !).]
Voilà si vous avez des questions nhésitez pas !

#84739 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 15 juin 2017 - 06:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pas de soucis c'est pas super dur à mettre en oeuvre dans tous les cas hein, le plus dur c’était de trouver la documentation
#84742 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 15 juin 2017 - 06:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Les applications sont multiples, surtout pour des balances connectées 
#85196 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 28 juin 2017 - 01:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le projet est fiancé à 100%, donc merci à tous les membres du forum qui ont participé (et il y en beaucoup )
Merci de votre soutien à tous , on va faire les vidéos des demain, donc déjà une seule pour remercier tout le monde 
#85187 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 28 juin 2017 - 09:08
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ici :
#84781 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 17 juin 2017 - 11:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On a reçu 4Kg de PLA et 1Kg d'ABS !!! grâce à notre partenariat avec https://www.filimprimante3d.fr/

C'est vrai super ça motive encore plus
#84744 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 15 juin 2017 - 07:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
ahhhh c'est pas con ça dis donc !
#85200 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 28 juin 2017 - 01:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
bah c'est le projet ahah donc ne vous en faites pas, par contre comme on l'a dit, c'est des vidéos explicatives il faut donc faire de la vulgarisation robotique, passer à coté de quelques trucs , et bien sur il y a des parties qui vont vous faire dormir, comme "c'est quoi une carte arduino" ... mais bon on fait du grand public hein
Oui il y a eu un grooooooos rush , la première vidéo va traiter du crowdfunding en lui même donc vous aurez donc des réponses plus précises




