Les objectifs fish eye ou les grands angles en général font des déformations. Ça fausse un peu la mesure quand l'objet est sur le côté.
Vu ton tableau du poste 221 la openmv a l'air un peu faible niveau traitement, surtout que tu as un robot de 1m. Je pense que cette cam est adaptée au petit robot.
Celle sur kickstarter a l'air d'être la meilleure des 3, mais 140° de champ de vision c'est beaucoup, ça rend moins précis la mesure en 3d.
Contenu de ashira
Il y a 1000 élément(s) pour ashira (recherche limitée depuis 27-mai 13)
Par type de contenu
Voir pour ce membre
#75144 Glenn Robot Humanoide
 Posté par
sur 15 octobre 2016 - 06:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 15 octobre 2016 - 06:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#75647 Glenn Robot Humanoide
Posté par
sur 27 octobre 2016 - 10:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bon comme tu avances bien et que t'es motivé promis je mets un résultat de test bientôt  (d'ici demain, la je remplis des tableaux c'est long)
(d'ici demain, la je remplis des tableaux c'est long)
(d'ici demain, la je remplis des tableaux c'est long)
#75139 Glenn Robot Humanoide
Posté par
sur 15 octobre 2016 - 05:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Si, j'avais bien eu ce problème avec une méthode un peu simplifiée. Avec la seconde méthode le résultat était meilleur, mais le phénomène reste le même. En gros plus tes cameras sont éloignées plus tu auras une grande portée. Plus la résolution des cameras/leur focal va être élevée, plus tu seras précis sur la plage.
Si tu peux, évite de prendre des objectifs qui fond des distortions(images courbées), sinon c'est pas dramatique mais ça fait un traitement en plus à faire.
Concernant ces cameras comme je ne les ai pas essayé j'hésite un peu à donner mon avis.
Peut être que d'autre les ont essayés
Si tu peux, évite de prendre des objectifs qui fond des distortions(images courbées), sinon c'est pas dramatique mais ça fait un traitement en plus à faire.
Concernant ces cameras comme je ne les ai pas essayé j'hésite un peu à donner mon avis.
Peut être que d'autre les ont essayés
#75111 Glenn Robot Humanoide
Posté par
sur 15 octobre 2016 - 11:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai regardé au début.. Donc plus de caméra pour rpi?
320x240 c'est pas beaucoup mais tu pourras quand même faire des choses avec. Au max de mémoire j'étais à 640x480, après les fps baissaient trop.
320x240 c'est pas beaucoup mais tu pourras quand même faire des choses avec. Au max de mémoire j'étais à 640x480, après les fps baissaient trop.
#75107 Glenn Robot Humanoide
Posté par
sur 15 octobre 2016 - 09:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je ne retrouve plus tes liens.
La caméra openmv me fait penser aux cmucam! Elle a l'air pas mal, si elle donne les coordonnées de ce qu'elle voit tu pourras utiliser la même méthode que moi. Par contre pour la profondeur à voir, j'ai pas fait de depth map ^^
La caméra openmv me fait penser aux cmucam! Elle a l'air pas mal, si elle donne les coordonnées de ce qu'elle voit tu pourras utiliser la même méthode que moi. Par contre pour la profondeur à voir, j'ai pas fait de depth map ^^
#75652 Glenn Robot Humanoide
Posté par
sur 27 octobre 2016 - 11:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je connais juste le principe sur le time of flight, mais je ne sais pas l'exploiter. Du coup je parlerai que de la méthode avec des images
Trop tard j'ai commencé, faut pas que je m'arrête
Trop tard j'ai commencé, faut pas que je m'arrête
#77033 Glenn Robot Humanoide
Posté par
sur 08 décembre 2016 - 12:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Si tu soudes un fil sur le potentiomètre du servo il faudra utiliser une entrée analogique pour lire l'angle
#77895 Glenn Robot Humanoide
Posté par
sur 13 janvier 2017 - 02:25
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu essais de faire ça comment ? En utilisant le fil soudé sur le potar du servo ? Et tu incrémentes les angles pris par le servo en fonction de la différence entre l'angle voulu et l'angle réel c'est ça ?
C'est vendredi mange du poisson
- J'ai oublié le troisième point... lol
C'est vendredi mange du poisson
#77750 Glenn Robot Humanoide
Posté par
sur 08 janvier 2017 - 02:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
En petit câble il y a aussi l'usb 3 que tu peux utiliser. Les paires de fil sont dans une petite gaine métallique et le câble est entouré d'une tresse.
#77043 Glenn Robot Humanoide
Posté par
sur 08 décembre 2016 - 04:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui par exemple les moteurs de l'épaule, si ça force peut être que le servomoteur n'arrivera pas à tenir exactement l'angle. Sur d'autre servomoteur (genre au niveau du cou) c'est pas forcément necessaire.
#77035 Glenn Robot Humanoide
Posté par
sur 08 décembre 2016 - 12:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Il y a ce genre de module qui peu être utile https://www.sparkfun.com/products/9056
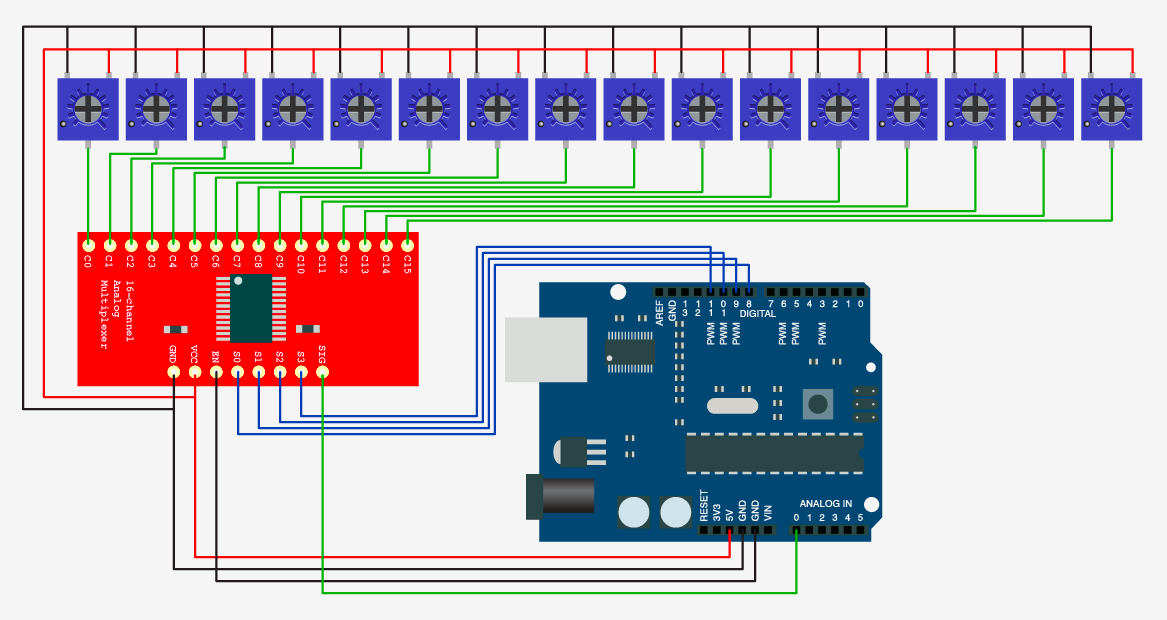
Après est ce que c'est nécessaire de le faire avec tous les servo, tu voudrais connaître la position dans quel but?
Après est ce que c'est nécessaire de le faire avec tous les servo, tu voudrais connaître la position dans quel but?
#75085 Glenn Robot Humanoide
Posté par
sur 14 octobre 2016 - 12:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le truc c'est que je vais être bloqué sur cette pièce, car il me manque des informations, genre, quoi mettre comme caméras car j'aimerais bien pouvoir faire comme Ashira avec la vision stéréoscopique
bon il va falloir que j’accélère le pas avec mes tests
au fait, qu'est ce qui t’intéresse dans le fait qu'il puisse voir en 3d ?
#74931 Glenn Robot Humanoide
Posté par
sur 11 octobre 2016 - 10:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le problème c'est que faire marcher correctement un bipède n'est pas aussi simple que de faire bouger une articulation.
Il faut voir si le verin résoud le problème du jeu qui ne faut pas sous estimer, surtout si le robot est grand. Et un vérin avec tige filetée fait perdre la souplesse de l'articulation par rapport à un servomoteur, est ce que ça ne poserait pas problème? Pour moi c'est aussi important que le couple et la vitesse.
Pourquoi pas commencer par faire un bras plutôt qu'une jambe pour mieux appréhender tous ces problèmes ? Le défi est sûrement moins grand pour un bras.
Il faut voir si le verin résoud le problème du jeu qui ne faut pas sous estimer, surtout si le robot est grand. Et un vérin avec tige filetée fait perdre la souplesse de l'articulation par rapport à un servomoteur, est ce que ça ne poserait pas problème? Pour moi c'est aussi important que le couple et la vitesse.
Pourquoi pas commencer par faire un bras plutôt qu'une jambe pour mieux appréhender tous ces problèmes ? Le défi est sûrement moins grand pour un bras.
#73288 Glenn Robot Humanoide
Posté par
sur 31 août 2016 - 07:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le tout c'était de commencer dans l'ordre
Moi j'ai une prusa i3 et j'en suis satisfait. Elle arrive en kit mais la notice est claire.
Avec une buse de 4mm et un réglage de hauteur de couche à 3mm, la qualité me convient.
Exemple:
Mais un réglage plus fin est possible.
Moi j'ai une prusa i3 et j'en suis satisfait. Elle arrive en kit mais la notice est claire.
Avec une buse de 4mm et un réglage de hauteur de couche à 3mm, la qualité me convient.
Exemple:
Mais un réglage plus fin est possible.
#73292 Glenn Robot Humanoide
Posté par
sur 31 août 2016 - 09:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Sur papier elle a l'air bien. Si tu peux prend un plateau chauffant, ça aide beaucoup. Essai de trouver des tests de ce modèle sur YouTube par exemple pour te faire un avis.
#73129 Glenn Robot Humanoide
Posté par
sur 24 août 2016 - 08:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Si tu veux on peut essayer déjà de faire varier la vitesse d'un servo en fonction des variations d'un capteur.
Il y a plusieurs possibilités, je t'en propose deux qui me viennent:
-soit tu as accès à un temps (avec ton rpi ou autre) et tu échantillonnes les valeurs de ton capteur. Tu vas obtenir une courbe.
Ensuite tu calcules à interval régulié un coefficient directeur de la courbe (calcul du nombre dérivé).
Plus les valeurs de ton capteur vont varier fortement, plus la valeur du coefficient sera élevé.
Pour faire varier la vitesse du servo: tu fais avancer 1 degrés par 1 degrés ton servo avec un certain délai entre chaque degrés, et tu fais varier ce délai en fonction du coefficient que tu calcules (ce coefficient peut être négatif, tu peux prendre sa valeur absolue si le signe négatif te gêne).
-Ou alors plus simple à mettre en oeuvre:
Tu enregistres les valeurs du capteur, d'abord dans une première valeur puis dans une deuxième. Tu soustrais la 2eme valeur à la première et tu prends la valeur absolue du résultat.
Pour faire varier la vitesse, idem que la première méthode.
L'avantage de la première méthode c'est d'accéder à un vrai temps, plus tard pour calculer des vitesses ou des accélérations ce sera sûrement utile, mais pour manipuler un peu tu peux essayer la deuxième méthode.
Il y a plusieurs possibilités, je t'en propose deux qui me viennent:
-soit tu as accès à un temps (avec ton rpi ou autre) et tu échantillonnes les valeurs de ton capteur. Tu vas obtenir une courbe.
Ensuite tu calcules à interval régulié un coefficient directeur de la courbe (calcul du nombre dérivé).
Plus les valeurs de ton capteur vont varier fortement, plus la valeur du coefficient sera élevé.
Pour faire varier la vitesse du servo: tu fais avancer 1 degrés par 1 degrés ton servo avec un certain délai entre chaque degrés, et tu fais varier ce délai en fonction du coefficient que tu calcules (ce coefficient peut être négatif, tu peux prendre sa valeur absolue si le signe négatif te gêne).
-Ou alors plus simple à mettre en oeuvre:
Tu enregistres les valeurs du capteur, d'abord dans une première valeur puis dans une deuxième. Tu soustrais la 2eme valeur à la première et tu prends la valeur absolue du résultat.
Pour faire varier la vitesse, idem que la première méthode.
L'avantage de la première méthode c'est d'accéder à un vrai temps, plus tard pour calculer des vitesses ou des accélérations ce sera sûrement utile, mais pour manipuler un peu tu peux essayer la deuxième méthode.
#73119 Glenn Robot Humanoide
Posté par
sur 23 août 2016 - 09:11
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
En gros ce que tu veux (en zapant la partie capteur car je n'ai pas compris ce que tu voulais faire) c'est que ton servo accélère puis ralentit avant d'atteindre son angle de consigne ?
#72810 Glenn Robot Humanoide
Posté par
sur 07 août 2016 - 05:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
N'oublie pas aussi que des webcams peuvent contenir 1 ou plusieurs micros (4 pour la ps3 eye par exemple).
#74800 Glenn Robot Humanoide
Posté par
sur 07 octobre 2016 - 09:09
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On dirait que c'est l'agile eye ! tu trouveras plein de vidéos sur YouTube pour voir comment ça bouge ^^
tu trouveras plein de vidéos sur YouTube pour voir comment ça bouge ^^
#74844 Glenn Robot Humanoide
Posté par
sur 09 octobre 2016 - 08:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu as un lien pour les moteurs ?
Et ta jambe fait quelle taille ? Perso je trouve que les moteurs du bassin sont les plus difficiles à dimensionner: il faut prendre en compte le poids du haut du robot, le poids et la taille de la jambe, avoir le moins de jeu possible surtout si le robot est grand..
Et ta jambe fait quelle taille ? Perso je trouve que les moteurs du bassin sont les plus difficiles à dimensionner: il faut prendre en compte le poids du haut du robot, le poids et la taille de la jambe, avoir le moins de jeu possible surtout si le robot est grand..
#74897 Glenn Robot Humanoide
Posté par
sur 10 octobre 2016 - 12:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Les moteurs maxons doivent coûter cher^^
Si tu essaies avec des vérins, tu sais à peu près ou les fixer ? Pour pouvoir déterminer la course du vérin et en suite le couple et la vitesse.
Ton moteur à quelles caractéristiques ?
Si tu essaies avec des vérins, tu sais à peu près ou les fixer ? Pour pouvoir déterminer la course du vérin et en suite le couple et la vitesse.
Ton moteur à quelles caractéristiques ?
#74880 Glenn Robot Humanoide
Posté par
sur 09 octobre 2016 - 10:50
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai penser à toi en voyant ça! Avec des vérins de ce type peut être que tu règles certains problèmes liés au couple, genre rester debout jambes fléchis.
#74854 Glenn Robot Humanoide
Posté par
sur 09 octobre 2016 - 10:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est à dire le jeu.
En fait les servomoteurs ce sont là même chose: petit moteur dc, engrenages et électronique. Un des intérêts de le faire soit même c'est de prendre un moteur plus puissant que ce qu'on trouve pour le modélisme.
A mon avis la consommation électrique est négligeable en face de ce problème. De toute façon si tu es juste en puissance il te faudra quelque chose de plus lent ou qui consomme plus. Dans tous les cas si tu dois en prendre je te conseil de ne pas acheter tout d'un coup et faire des tests, pour éviter des dépenses inutiles!
En fait les servomoteurs ce sont là même chose: petit moteur dc, engrenages et électronique. Un des intérêts de le faire soit même c'est de prendre un moteur plus puissant que ce qu'on trouve pour le modélisme.
A mon avis la consommation électrique est négligeable en face de ce problème. De toute façon si tu es juste en puissance il te faudra quelque chose de plus lent ou qui consomme plus. Dans tous les cas si tu dois en prendre je te conseil de ne pas acheter tout d'un coup et faire des tests, pour éviter des dépenses inutiles!
#74851 Glenn Robot Humanoide
Posté par
sur 09 octobre 2016 - 10:09
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Honnêtement je sais pas..^^
Moi j'étais parti sur un gros moteur dc et engrenages, mais ça ne résouds pas tous les problèmes.. Peut être les doubler là où ils sont le plus sollicités.
Moi j'étais parti sur un gros moteur dc et engrenages, mais ça ne résouds pas tous les problèmes.. Peut être les doubler là où ils sont le plus sollicités.
#72792 Glenn Robot Humanoide
Posté par
sur 05 août 2016 - 11:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Il y a des modules micros+ampli en analogique qui existent en 5v. Sinon si le nombre de port usb de la rpi te gêne il y a aussi des hubs usb.




