Bonjour à tous.
J'ai un petit problème avec mon capteur infrarouge sharp , et je voulais savoir comment on c'est si le capteur fonctionne, ou ne fonctionne pas???
Aviez-vous des idées


problème avec le capteur sharp
Débuté par
seb03000
, août 14 2011 02:14
18 réponses à ce sujet
#2

Hexa Emails
-

- Membres
-

- 439 messages
Habitué
- Gender:Male
Posté 14 août 2011 - 02:30
J'ai 2 capteurs sharp, je les ai peu utilisé, mais il parrait qu'ils sont très fragiles.
il faut l'alimenter avec 5volts, et mesurer la sortie (est-ce que tu as un voltmètre chez toi? sinon tu peux utiliser les entrées analogiques d'un arduino par exemple.)
il faut l'alimenter avec 5volts, et mesurer la sortie (est-ce que tu as un voltmètre chez toi? sinon tu peux utiliser les entrées analogiques d'un arduino par exemple.)
#3
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 14 août 2011 - 03:15
Heu..... non , mais je conte en acheté un.
Peux-tu m’éclairer sur la pratique de ton astuce , merci
sinon tu peux utiliser les entrées analogiques d'un arduino par exemple
Peux-tu m’éclairer sur la pratique de ton astuce , merci
#4
Sani300
-

- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 14 août 2011 - 08:06
C'est a dire tu ne capte plus rien? Quand tu lis sur la pin avec le serial monitor de arduino tu as quoi?
#5
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 14 août 2011 - 08:20
Comment ça??C'est a dire tu ne capte plus rien? Quand tu lis sur la pin avec le serial monitor de arduino tu as quoi?
De toute façon oui j'ai l’impression que le capteur ne fonctionne pas.
Voici mon code de mon robot
#include <Servo.h>
int vitesse1 = 6;
int vitesse2 = 5;
int direction1 = 7;
int direction2 = 4;
int capteur = 0; // broche analogique utilisé pour connecter le capteur
int val; // variable pour lire la valeur de la broche analogique
Servo myservo;// créer un objet de servo pour contrôler un servomoteur
void Moteur1(int valeur_vitesse, boolean sens_avant)
{
analogWrite(vitesse1,valeur_vitesse); //valeur_vitesse = 0 à l'arrêt, et 255 pour vitesse maximum
if(sens_avant)
{
digitalWrite(direction1,HIGH);
}
else
{
digitalWrite(direction1,LOW);
}
}
void Moteur2(int valeur_vitesse, boolean sens_avant)
{
analogWrite(vitesse2,valeur_vitesse); //valeur_vitesse = 0 à l'arrêt, et 255 pour vitesse maximum
if(sens_avant)
{
digitalWrite(direction2,HIGH);
}
else
{
digitalWrite(direction2,LOW);
}
}
void setup()
{
myservo.attach(2); // attache le servo sur la broche 2 à l'objet servo
int i;
for(i=4;i<=8;i++)
pinMode(i, OUTPUT); //met les pin 4,5,6,7 en mode sortie
}
void loop()
{
val = analogRead(capteur); // lit la valeur du capteur (valeur comprise entre 0 et 115)
val = map(val, 0, 115, 0, 300); // l'échelle pour l'utiliser avec le servo (valeur entre 0 et 300)
myservo.write(val); // définit la position d'asservissement en fonction de la valeur à l'échelle
delay(1000); // attend que le servo pour y arriver
if (val <= 170) // si on est à moins de quelque cm d'un obstacle
{
Moteur1(0,true); //j’arrête le moteur 1
Moteur2(0,true); // j’arrête le moteur 2
delay(300); //j’attends quelque secondes
Moteur1(255,true); //j'avance le moteur 1 a fond
Moteur2(0,true); // j’arrête le moteur 2
delay(400); //j’attends quelque secondes
Moteur1(255,true); //J'avance tout droit en mettant les 1 moteurs à fond
Moteur2(255,false); //J'avance tout droit en mettant les 2 moteurs à fond
}
else
{
Moteur1(255,false);
Moteur2(255,true);
}
}édité: c'est fait Black Templar j'ai mis la balise
#6
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 14 août 2011 - 08:43
Salut !
Si tu as plusieurs capteurs du même type, tu peux tester si le code que tu as ici marche sur l'un d'entre eux. Si c'est le cas, ça veut dire que ton capteur est effectivement cramé !
Sinon, n'oublie pas de mettre en page ton code source en l'encadrant par les balises [ code] et [ /code] !
++
Black Templar
Si tu as plusieurs capteurs du même type, tu peux tester si le code que tu as ici marche sur l'un d'entre eux. Si c'est le cas, ça veut dire que ton capteur est effectivement cramé !
Sinon, n'oublie pas de mettre en page ton code source en l'encadrant par les balises [ code] et [ /code] !
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#7
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 14 août 2011 - 09:57
OK Black Templar pour les balises merci de me l'avoir signalé.
Sinon non , j'ai qu'un capteur , je ne vais pas pourvoir faire le teste que tu me proposes.
Sinon non , j'ai qu'un capteur , je ne vais pas pourvoir faire le teste que tu me proposes.
#8
Sani300
-
- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 14 août 2011 - 10:47
Moi je te parlais plutôt de cette fonction expliqué en anglais sur leur site,
http://arduino.cc/en/Tutorial/AnalogReadSerial
Ca va permettre de voir ce que tu recois en decimal ou en hexa a toi de decider!
Comme ça tu verra si tu passe quelque chose devant si il ne recoit vraiment rien, moi j'ai d'abord fait ça pour comprendre vraiment les valeurs que j'obtenais!
http://arduino.cc/en/Tutorial/AnalogReadSerial
Ca va permettre de voir ce que tu recois en decimal ou en hexa a toi de decider!
Comme ça tu verra si tu passe quelque chose devant si il ne recoit vraiment rien, moi j'ai d'abord fait ça pour comprendre vraiment les valeurs que j'obtenais!
#9
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 15 août 2011 - 12:36
Le souci c'est que je n'est pas de Potentiomètre donc c'est more aussi.
Aux pire , j'ai un capteur de distance par ultrasons URM V3.2 , mais je ne c'est pas comment il fonctionne.
Donc je vais me mettre dessus et trouver comment il fonctionne
Aux pire , j'ai un capteur de distance par ultrasons URM V3.2 , mais je ne c'est pas comment il fonctionne.
Donc je vais me mettre dessus et trouver comment il fonctionne
#10
Sani300
-
- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 15 août 2011 - 04:41
Haaaaa j'ai aussi ce capteur c'est le capteur ultrason c'est ça?!
Dit moi si tu arrive a le faire fonctionner moi j'ai plus ou moins laissé tombé pour le moment, en meme temps c'est la premiere fois que j'utilise l'ultrason!
Par contre je te donne ce site, je ne sais pas si tu le connais : http://www.dfrobot.com/wiki/index.php?title=URM37_V3.2_Ultrasonic_Sensor_%28SKU:SEN0001%29
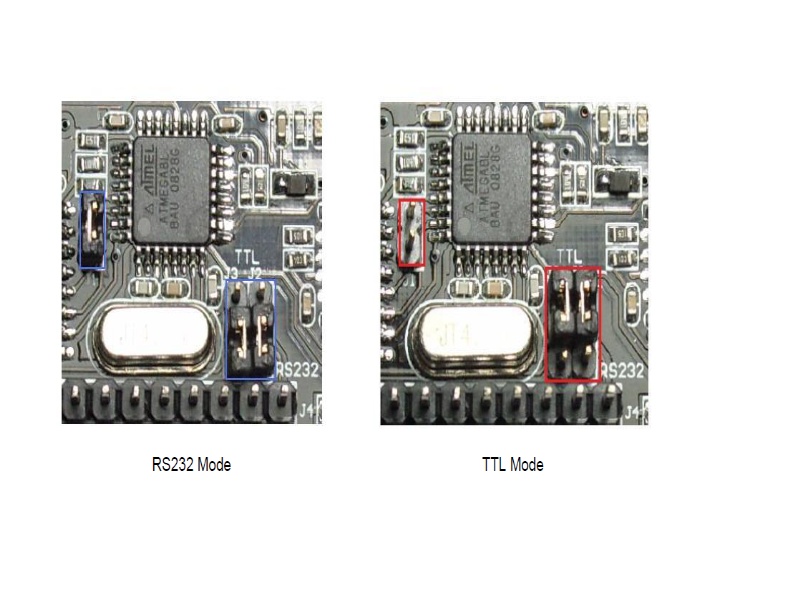
Ils expliquent pratiquement tout sur ce capteur, je voulais moi le mettre en Mode2 mais il faut pour ça re programmer l'EEPROM et la deja il faut une connexion RS232 mais je n'ai pas de câble pour, je me posais d'ailleurs la questions si il n'y avait pas moyen de passer par l'Arduino pour le faire mais je sais pas du tout!
Dit moi si tu arrive a le faire fonctionner moi j'ai plus ou moins laissé tombé pour le moment, en meme temps c'est la premiere fois que j'utilise l'ultrason!
Par contre je te donne ce site, je ne sais pas si tu le connais : http://www.dfrobot.com/wiki/index.php?title=URM37_V3.2_Ultrasonic_Sensor_%28SKU:SEN0001%29
Ils expliquent pratiquement tout sur ce capteur, je voulais moi le mettre en Mode2 mais il faut pour ça re programmer l'EEPROM et la deja il faut une connexion RS232 mais je n'ai pas de câble pour, je me posais d'ailleurs la questions si il n'y avait pas moyen de passer par l'Arduino pour le faire mais je sais pas du tout!
#11
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 15 août 2011 - 10:27
Oui c'est un capteur ultrason.
Oui je connais ce site , le souci c'est que c'est en anglais donc je vais me trouver un module qui traduit l'anglais en français.
Par contre je te donne ce site, je ne sais pas si tu le connais : http://www.dfrobot.c...8SKU:SEN0001%29
Oui je connais ce site , le souci c'est que c'est en anglais donc je vais me trouver un module qui traduit l'anglais en français.
#12
Sani300
-
- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 16 août 2011 - 12:15
Ba il faut connecter le capteur au pc pour pouvoir re programmer l'EEPROM et tu as de choix soit en TTL ou soit en RS232, le RS232 c'est pour le pc.
Mais alors pour le connecter au pc et le reprogrammer je ne sais pas comment faire!
La connexion RS232 est la connexion par le port COM d'un pc
Mais alors pour le connecter au pc et le reprogrammer je ne sais pas comment faire!
La connexion RS232 est la connexion par le port COM d'un pc
#13
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 16 août 2011 - 12:22
Et bien tu utilises tes câbles et tu connectes tes pins sur la carte Arduino. Après tu branches ton câble ton COM a ton pc
C'est ce que je vais faire.
C'est ce que je vais faire.
#14
Sani300
-
- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 16 août 2011 - 12:44
ok ok, donc tu veux passer par le port COM du pc, mais comment le brancher au port COM? Par quelles pins?! C'est ça que j'arrive pas a trouver en fait, et surtout j'ai plus vraiment de port COM sur mon pc.. Mais bon ça je dois pouvoir trouver un pc avec un port COM
#15
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 16 août 2011 - 01:05
Et bien, sur ta carte Arduino ta des pins RX et TX et tu branches ton capteur ta des broches RX et TX aussi tu branches sa plus la masse et l'alimentation et tu branches ton COM a ton pc
#16
Sani300
-
- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 16 août 2011 - 01:11
J'aime pas je fais le mec assisté qui comprends rien...
Oui oui comme je disais plus haut je pensais bien qu'il y avais peut être moyen de passer par l'Arduino, et le branchement peut etre que ça j'avais bien vu sur la carte les branchement RX et TX!
Mais voila, si je fais ce branchement je fais quoi après?!
L'EEPROM n'est pas vide je suppose il y a bien une lecture de l'EEPROM et changer une valeur dedans pour avoir ce mode 2...
J'ai rien trouvé comme doc vraiment expliqué sur tout ça...
Edit : Si il y a bien cette partie qui en parle :
Mais je t'avoue n'avoir jamais programmer un EEPROM, alors c'est peut etre pour ça que je ne comprends pas!
Oui oui comme je disais plus haut je pensais bien qu'il y avais peut être moyen de passer par l'Arduino, et le branchement peut etre que ça j'avais bien vu sur la carte les branchement RX et TX!
Mais voila, si je fais ce branchement je fais quoi après?!
L'EEPROM n'est pas vide je suppose il y a bien une lecture de l'EEPROM et changer une valeur dedans pour avoir ce mode 2...
J'ai rien trouvé comme doc vraiment expliqué sur tout ça...
Edit : Si il y a bien cette partie qui en parle :

Mais je t'avoue n'avoir jamais programmer un EEPROM, alors c'est peut etre pour ça que je ne comprends pas!
#17
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 16 août 2011 - 01:28
Pour moi c'est donc et un peux vague , je ne serrer te l'expliqué.
#18
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 17 août 2011 - 09:50
Sinon sur cette image ya des Slaves c'est peu t’être sa qui permet son fonctionnement.
#19
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 17 août 2011 - 01:15
Oué et bien ça ne fonctionne pas il alaire compliqué se capteur , pour le faire fonctionné.








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




