

Bonsoir !
Je viens de me présenter sur le forum et pour ceux qui auront lus mon post, vous savez déjà un peu mon projet. Pour les autres je résume : mon oncle me propose de créer un robot qui par la suite sera amélioré par son équipe.
J'ai besoin d'aide pour créer un bras robotisé multifonctions.
Voici les caractéristiques de base :
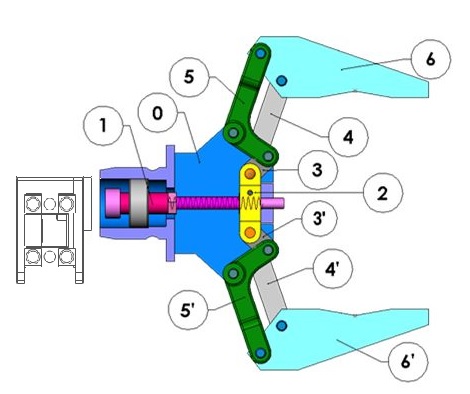
_Bras robotisé avec pince
_Guidable par télécommande sans fil ou par tout autre moyen sans fil
_pouvoir porter des objets de poins inférieur à 500gr
_ajout d'une caméra visionnable sur smartphone
_lampe intégré que l'on allume par le même système de commande du robot
Voici les caractéristiques du bras dans son état final et concret :
_Toutes les caractéristiques précédentes
_Système de réveil intégré par sonnerie et par luminosité (la lumière s'allume à une heure programmé)
_un système de sécurité avec détecteur et la caméra le tout sur smartphone
_un système vocal avec quelques ordres programmés (2 ou " mouvements enregistrés contôlable avec la voix)
_système de chat vocal (reconnaissance de 2 ou 3 phrases et réponses programmées)
Je sais que c'est un très gros projet mais je souhaite surtout réaliser le robot avec les caractéristiques de base.
D'après ce que je sais il me faut des servomoteurs, un microcontôleur, des pièces de plastiques\métal, une carte Arduino Uno, une caméra wifi\bluetooth, une lampe wifi\bluetooth, des câbles ...
Pourriez vous me guider pour les servomoteurs et le microcontrôleur, je suis perdu par rapport au couple nécessaire et le système du microcontrôleur ?
Merci beaucoup pour votre aide qui m'est si précieuse !
Alfa
P.S : si vous souhaitez participer à ce projet avec moi, envoyez moi un message, nous discuterons ensuite de la collaboration, il y aura tout naturellement une contre-partie, pour l'aide que vous m'apporterez.



 ( tu peux aussi sans doute trouver le schémas tout fait qui correspond à ce que tu veux
( tu peux aussi sans doute trouver le schémas tout fait qui correspond à ce que tu veux 






















{kind=link}