La suite du test!
Le petit montage que je réalise pour contrôler la vitesse du moteur pas à pas est le suivant :
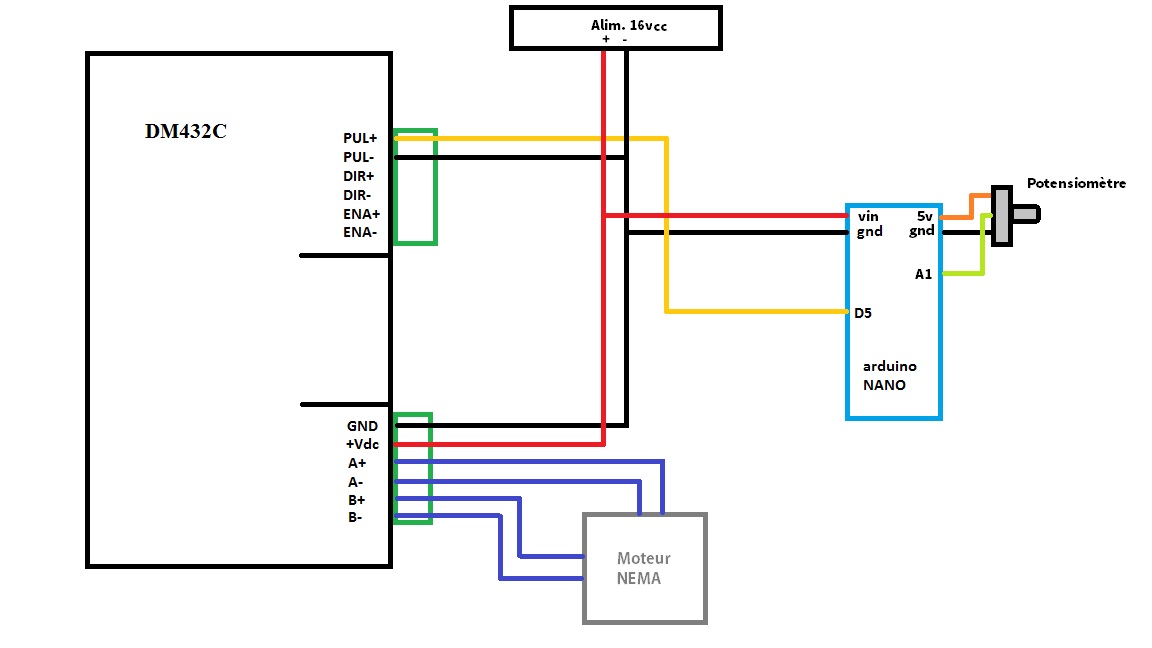
Et le code pour la nano:
int val;
#define potensiometre 1
#define steps 5
void setup() {
pinMode(steps, OUTPUT);
}
void loop() {
val = analogRead(potensiometre);
digitalWrite(steps, HIGH); delayMicroseconds(val);
digitalWrite(steps, LOW); delayMicroseconds(val);
}
Avec le potentiomètre je fais varier la fréquence à laquelle l'arduino envoie les steps au driver.
Pour montrer le silence du dm432c par rapport aux autres drivers classiques je vais le comparer avec le tb6560. Je fais le même type de montage pour le tb6560, et je sélectionne quel driver j'utilise grâce à 2 boutons poussoirs. Les 2 drivers sont réglés à environ 1A et les microsteps sont réglés à 1/8.
https://www.youtube....h?v=PDGoQ5GmFJ8
N'hésitez pas à monter le son! ^^
Du coup on devine assez bien les courbes du courant dans le moteur avec le driver dm432c, bien lisses!
Le courant dans le moteur avec les microsteps à 1/8: 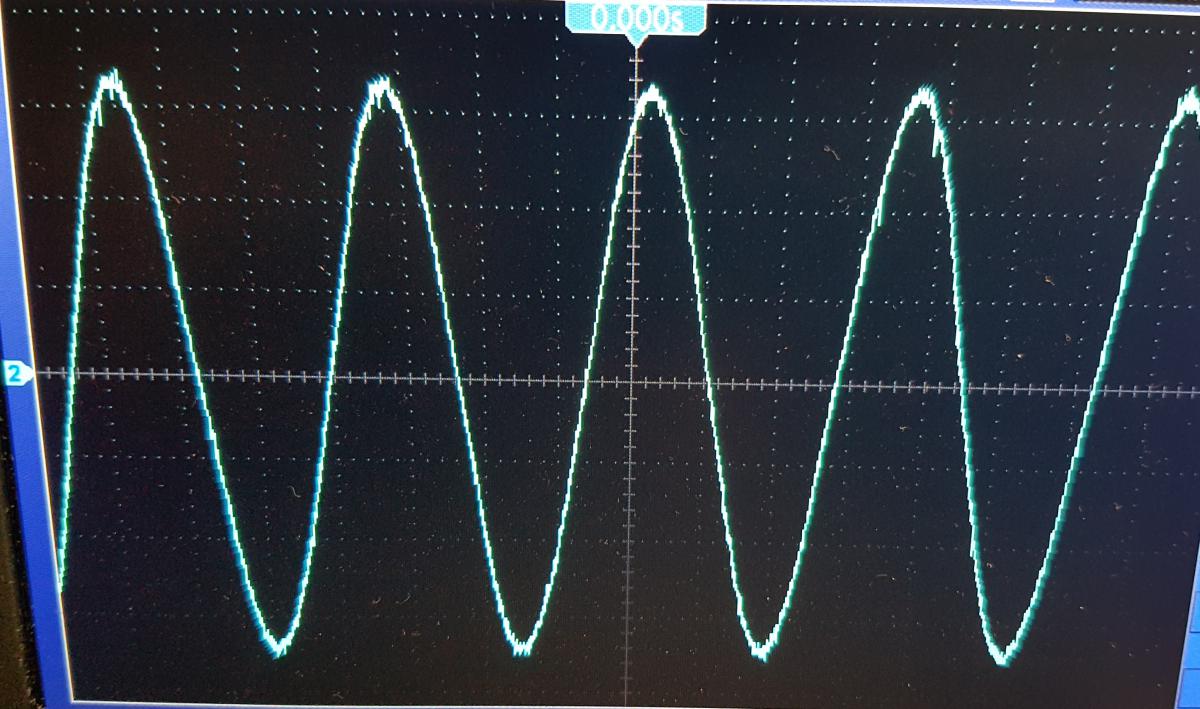
Et pour comparer avec le tb6560, voila un exemple de courbe de courant généré dans le moteur par les 2 drivers avec 1/2 en microsteps:
Avec le dm432c ->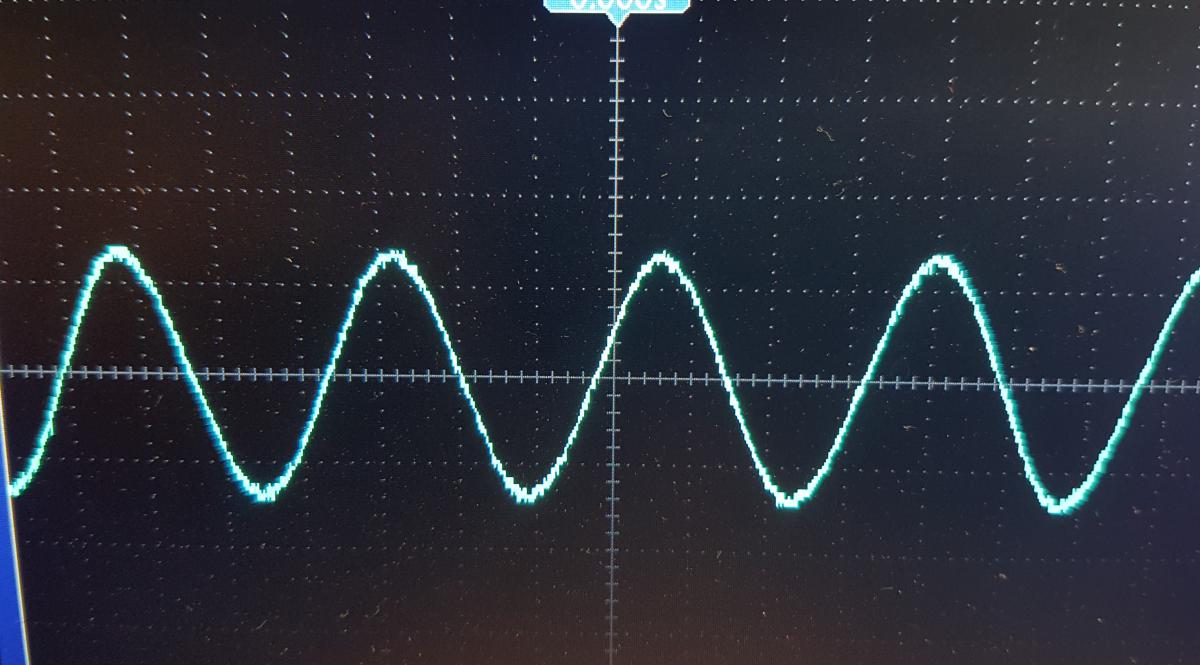
Avec le tb6560 ->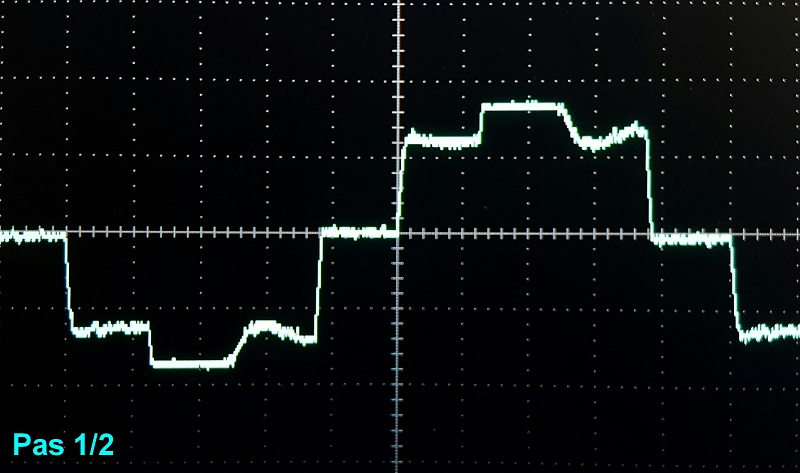




 DM432Cm.pdf 938,46 Ko
2623 téléchargement(s)
DM432Cm.pdf 938,46 Ko
2623 téléchargement(s)