
J'ai pensé qu'un sujet dédié était plus adapté à nos échanges qui ont débutés sur cette page, http://www.robot-maker.com/forum/topic/10614-les-trouvailles-de-thingiverse/
Voici les liens Wikipédia, https://fr.wikipedia...ki/Vis_sans_fin, https://en.wikipedia...wiki/Worm_drive
Pour commencer, une excellente description en Lego , c'est en anglais, mais tout est expliqué au tableau et c'est très visuel :
On peut en faire une sur mesure avec un écrou et une tige filetée.

22 réponses à ce sujet
#1

Oracid
-
- Modérateur
-

- 6â¯783 messages
Pilier du forum
- Gender:Male
#3
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 05 janvier 2017 - 08:03
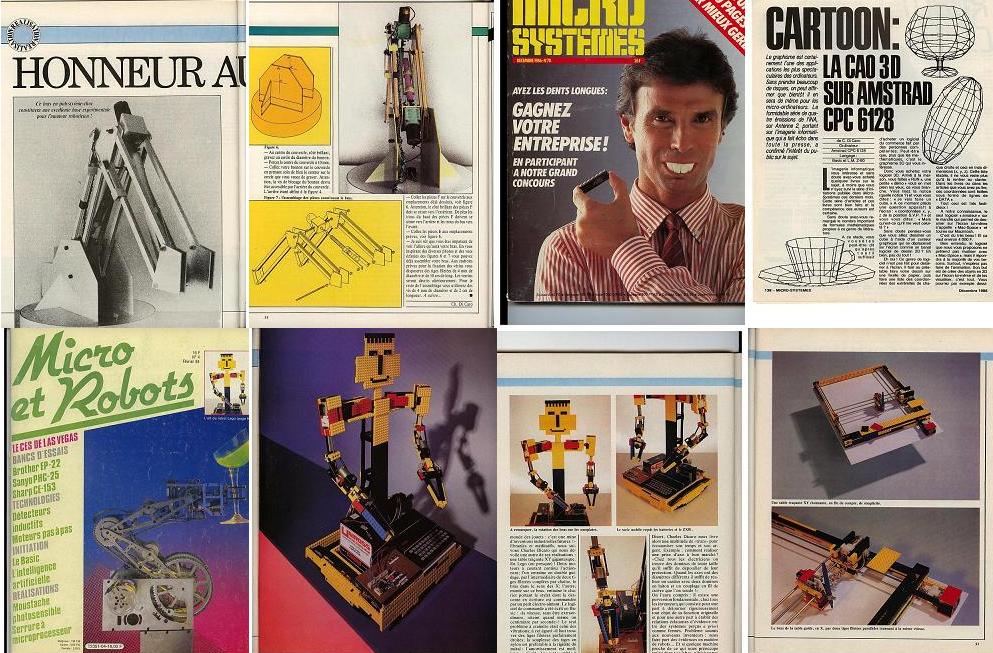
Voici l'image qui illustre ma présentation qui date déjà de 2011...
Comme vous pouvez le constater, j'utilisais déjà des vis sans fin dans les années 80.
En haut à gauche, le bras articulé en polystyrène choc proposé en réalisation aux lecteurs de la revue Micro et Robots. Si vous zoomer sur l'image, vous verrez 2 grosses tiges filetés en nylon couplées aux motoréducteurs.
Plus bas, l'humanoïde a le coude articulé également avec une tige fileté. La tête est de ma fille...
À droite, la table traçante a ses très grands axes fait à partir de tiges filetés également.
Tout ça pour vous dire que l'on peut se fabriquer assez facilement des mécanismes en vis sans fin. En nylon de préférence, à cause du poids.
On ne le voit pas sur cette image, mais j'avais commencé une main (en fait, un doigt) avec des tiges filetées en nylon très fines et flexibles à la manière des flexibles de perceuses. Ce qui permettait de déporter les moteurs.
À vous de jouer.
Comme vous pouvez le constater, j'utilisais déjà des vis sans fin dans les années 80.
En haut à gauche, le bras articulé en polystyrène choc proposé en réalisation aux lecteurs de la revue Micro et Robots. Si vous zoomer sur l'image, vous verrez 2 grosses tiges filetés en nylon couplées aux motoréducteurs.
Plus bas, l'humanoïde a le coude articulé également avec une tige fileté. La tête est de ma fille...
À droite, la table traçante a ses très grands axes fait à partir de tiges filetés également.
Tout ça pour vous dire que l'on peut se fabriquer assez facilement des mécanismes en vis sans fin. En nylon de préférence, à cause du poids.
On ne le voit pas sur cette image, mais j'avais commencé une main (en fait, un doigt) avec des tiges filetées en nylon très fines et flexibles à la manière des flexibles de perceuses. Ce qui permettait de déporter les moteurs.
À vous de jouer.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#5
Mike118
-

- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 05 janvier 2017 - 02:46
Je me demande si il ne commence pas à y avoir un mélange entre :
Système roue et vis sans fin => Qui permet d'avoir une transformation d'une rotation en une autre rotation de manière irréversible.
Système vis écrou => Qui permet de transformer une rotation en translation de manière irréversible aussi ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#6
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 05 janvier 2017 - 06:44
Je me demande si il ne commence pas à y avoir un mélange entre :
Système roue et vis sans fin => Qui permet d'avoir une transformation d'une rotation en une autre rotation de manière irréversible.
Système vis écrou => Qui permet de transformer une rotation en translation de manière irréversible aussi ...
Tout à fait, je pense que tu as raison.
Il s'agit bien de 2 principes différents.
Celui qui m'intéresse le plus est celui souvent utiliser en robotique, par James Bruton par exemple, ou dans les imprimantes 3D, c'est à dire le vérin.
Le premier, la vraie vis sans fin, est intéressant pour une rotation en continu, pour son irréversibilité, son réducteur de vitesse, et son changement d'orientation de l'axe à 90°. Mais après quelques essais, il m'a déçu pour le positionnement en raison du jeu de la roue dentée.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#7
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 05 janvier 2017 - 07:31
James burton utilise des moteurs avec des réducteurs à base de roue vis sans fin dans son précédent robot bipède. ( gonk)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#8
Telson
-

- Membres
-
- 975 messages
Membre chevronné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 05 janvier 2017 - 08:44
@Oracid, tu utilisais quoi comme vis sans fin car le jeu est lié, entre autres, à la qualité de la taille des dents.....
Utilisais tu des vis sans fin lego ou du matériel industriel....
#9
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 06 janvier 2017 - 08:30
Du Lego.@Oracid, tu utilisais quoi comme vis sans fin car le jeu est lié, entre autres, à la qualité de la taille des dents.....
Utilisais tu des vis sans fin lego ou du matériel industriel....
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#10
Telson
-
- Membres
-
- 975 messages
Membre chevronné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 06 janvier 2017 - 08:54
cool!
Avec vis sans fin et engrenage lego tu arrivais à obtenir quoi comme précision. Pourrais tu nous faire un retour d'expérience sur la question? aurais tu encore des schémas, photos, vidéos?
Merci par avance....
#11
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 06 janvier 2017 - 02:13
Sympa de me donner du boulot...cool!
Avec vis sans fin et engrenage lego tu arrivais à obtenir quoi comme précision. Pourrais tu nous faire un retour d'expérience sur la question? aurais tu encore des schémas, photos, vidéos?
Merci par avance....
Je vais voir ce que je peux faire.
Effectivement, je n'y avait pensé, mais cela peut intéresser.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#13
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 06 janvier 2017 - 03:14
Comme dit plus haut, j'ai déjà utilisé ce type de mécanisme il y a plus de 30 ans.@Oracid du coup tu t'intéresses à ce mécanisme juste par curiosité ou tu comptes l'utiliser dans une de tes constructions ?
Oui, je compte l'utiliser dans un char a châssis articulé...... mais chut...
Mais comme tu as pu t'en rendre compte, je mets moins de temps à abandonner un projet qu'à me lancer dessus.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#15
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 07 janvier 2017 - 04:02
À la demande de Telson.
Une articulation basée sur la vis sans fin. Rien d'extraordinaire, ça fonctionne.
Notez les petits élastiques pur rattraper les jeux.
Par contre, à la fin, le zoom arrière sur mon établi, certains vont craquer ...


Ma chaine YouTube : https://www.youtube..../oracid1/videos
#17
arobasseb
-

- Administrateur
-
- 737 messages
Membre chevronné
- Gender:Male
- Location:BORDEAUX (33)
Posté 23 octobre 2017 - 11:57
A la fin de la première vidéo, on voit un système vis crémaillère, qui permet de convertir une rotation en translation comme le fait un système vis écrou, du coup quel différence entre c'est deux système ?
#18
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 23 octobre 2017 - 01:48
Je suppose que tu veux parler des 2 vidéos au début de ce fil.A la fin de la première vidéo, on voit un système vis crémaillère, qui permet de convertir une rotation en translation comme le fait un système vis écrou, du coup quel différence entre c'est deux système ?
A priori, je dirais qu'il n'y a pas de différence fondamentale en terme de couple (si les rapports vis/écrous ou vis/crémaillère sont identiques.
Dans la première vidéo :
- une vis fait tourner une roue, modification de la direction à 90°, système rotatif autobloquant.
- puis une vis fait avancer une crémaillère. Transformation d'un mouvement rotatif en mouvement linéaire. Système autobloquant également. Contrairement à ce qui est montré, la vis n'a nul besoin d'être aussi longue, 2 ou 3 pas de vis suffisent.
Dans la deuxième vidéo :
- transformation d'un mouvement rotatif en un mouvement linéaire. Dans ce cas, c'est l'écrou qui se déplace.
Actuellement, je suis en plein dans l'utilisation de ces systèmes. Mais j'ai abandonné le principe de la vis très couteux en frottement au profit d'un couplage roue dentée/crémaillère qui est vraiment très efficace et facile à mettre en oeuvre. C'est vraiment en le testant que l'on peut apprécier la qualité du système.
On peut en voir l'application sur la 3eme photo de ce poste , http://www.robot-maker.com/forum/topic/11067-lego-char-a-geometrie-variable/?p=88158
Aujourd'hui, si j'avais un mécanisme à vérin à mettre en oeuvre, c'est ce système de roue dentée/crémaillère que j'utiliserais.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#19
arobasseb
-
- Administrateur
-
- 737 messages
Membre chevronné
- Gender:Male
- Location:BORDEAUX (33)
Posté 23 octobre 2017 - 02:05
Merci Oracid.
Par contre utiliser une roue dentée / crémaillère au lieu d'une vis sans fin oblige à excentrer le moteur mais par contre permet une réversibilité. Dans ton cas cette réversibilité ne te pose pas de problème pour une utilisation comme vérin ?
Je pose toutes ces questions car je réfléchis à la réalisation diy d'un actionneur linéaire en ajoutant les quelques idées que j'ai en stock au creu de ma tête. Je vais devoir bien sûr réaliser des expérimentations, mais j'aime bien aussi prendre le ressenti et le vécu d'autres personnes, pour bien comprendre les point faible et fort des différentes solutions.
#20
Oracid
-
- Modérateur
-
- 6â¯783 messages
Pilier du forum
- Gender:Male
Posté 23 octobre 2017 - 02:40
Dans mon exemple, la réversibilité est impossible en raison de l'utilisation de plusieurs roues de réduction.
Le fait que le moteur soit déporté peut aussi être considéré comme un avantage.
Si à la place d'une roue/crémaillère, j'utilisais un système vis/crémaillère, le moteur serait dans le prolongement du vérin et pourrait empêcher le mouvement de la crémaillère, sans parler des problèmes d'alignement. Pour éviter cela, on met le moteur largement au dessus de la crémaillère, mais dans ce cas, un système à vis devrait avoir un grand diamètre.
Bref, j'ai constaté qu'il y a beaucoup d'avantage à déporter le moteur sur le coté. Dans le cas du gros servo Lego, sa forme est prédisposée à cette situation.
Dans le cas de l'utilisation d'un servo classique à rotation continue, la sortie du servo serait également bien adapté à cette position, alors que cela poserait des problèmes d'encombrement s'il était dans l'alignement.
Le fait que le moteur soit déporté peut aussi être considéré comme un avantage.
Si à la place d'une roue/crémaillère, j'utilisais un système vis/crémaillère, le moteur serait dans le prolongement du vérin et pourrait empêcher le mouvement de la crémaillère, sans parler des problèmes d'alignement. Pour éviter cela, on met le moteur largement au dessus de la crémaillère, mais dans ce cas, un système à vis devrait avoir un grand diamètre.
Bref, j'ai constaté qu'il y a beaucoup d'avantage à déporter le moteur sur le coté. Dans le cas du gros servo Lego, sa forme est prédisposée à cette situation.
Dans le cas de l'utilisation d'un servo classique à rotation continue, la sortie du servo serait également bien adapté à cette position, alors que cela poserait des problèmes d'encombrement s'il était dans l'alignement.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




