

Bonjour à tous.
Je vous annonce la naissance de mon premier robot et vous présente :
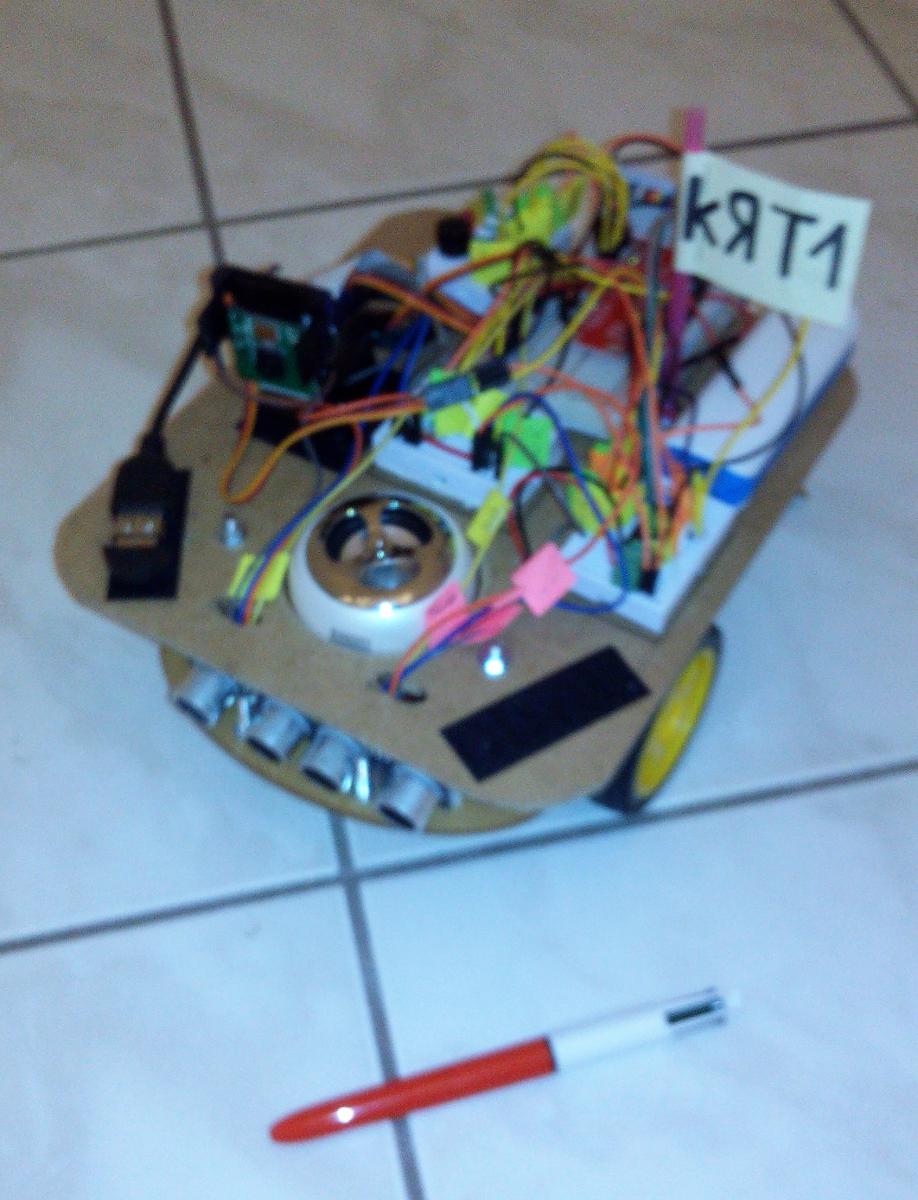
KRT1 (Prononcez Crétin !).
KRT1 est capable d'avancer, reculer, tourner à droite ou à gauche et, bien sûr stopper.
En plus de ces instructions de déplacements KRT1 sait obéir à quelques ordres simples.
Pour communiquer avec KRT1 plusieurs méthodes sont possibles :
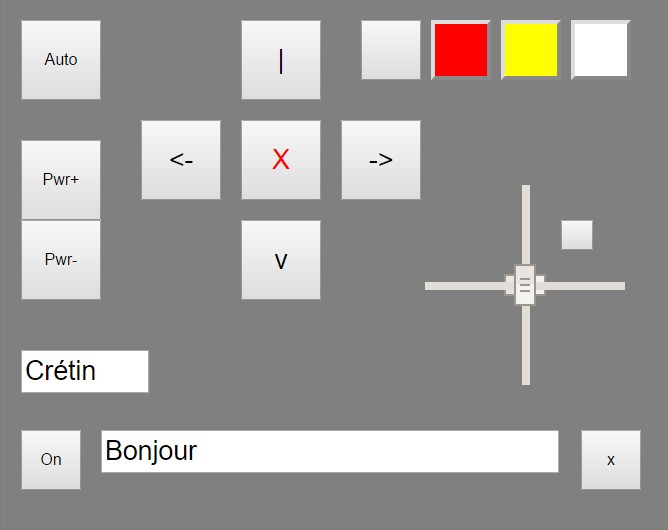
Par les touches de sa page Web associée.
Par écrit sur cette même page Web.
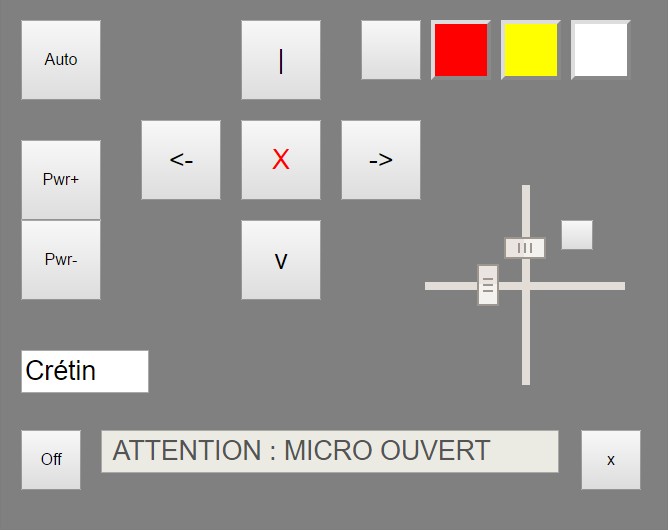
Par la voix (Il faut que KRT1 soit assez proche car il est un peu sourdingue).
KRT1 voit et peut montrer ce qu'il voit.
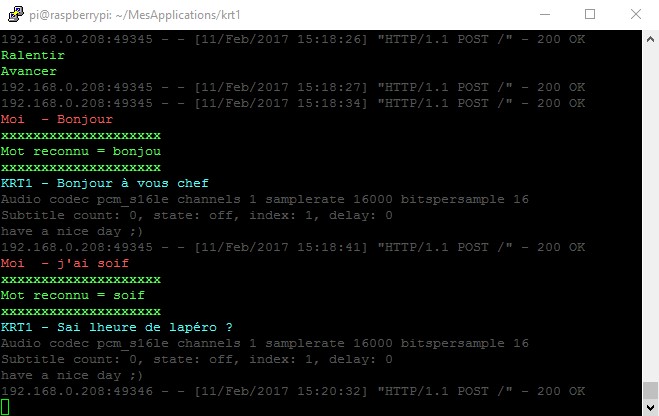
KRT1 écoute et parle, il peut dialoguer.
KRT1 écrit ce qu'il dit mais apparemment il est pour la réphorme de l'ortograffe.
KRT1 est mal coiffé.
KRT1 sait se promener seul sans se cogner systèmatiquement la tronche dans les murs.
KRT1 assume son nom (Il n'a pas eu le choix, je le lui est imposé).
KRT1 reconnait les couleurs rouge et jaune ainsi que les points de lumière.
KRT1 peut jouer à "Cherche la baballe !".
KRT1 n'a pas de cerveau positronique.
KRT1 aime le chocolat mais n'y a pas droit car il n'a pas de bras.
KRT1 approche de son maître pour peu que celui-ci porte un nez rouge de clown.
KRT1 aime la musique du générique de la série Star Trek.
KRT1 énerve ma femme (Vire moi ce truc), amuse ma petite fille (C'est 'ligolo' Papy) et effraie le chat (Miaou).
KRT1 n'est pas beau mais il ne faut pas le lui dire.
KRT1 et moi aimons la bonne bière (Surtout moi).
KRT1 connait les 3 lois de la robotique mais s'en cogne royalement.
KRT1 n'apprécie pas qu'on lui parle en anglais (Il est vrai qu'ils nous ont quand même brulé la Jeanne).
En général KRT1 est respectueux mais il peut parfois être désobéissant et/ou grossier.
KRT1 est encore et sera toujours en phase d'apprentissages et réglages. Je lui apprends régulièrement de
nouveaux mots avec les réponses/actions associées (Je souhaite quand même qu'un jour il se rende vraiment utile).
Bref, KRT1 est loin d'être parfait mais je commence à bien aimer ce p'tit con.
Ses caractéristiques physiques :
KRT1 pèse 985 grammes, il mesure 20 cm de haut 23 cm de long et 18 cm de large.
Son IMC est de 24,625 : il est en limite du surpoids...
Il est composé de :
1 chassis équipé de 2 roues motorisées alimentées par 4 piles de 1,5v et 1 roue folle-dingue.
1 Rapberry Pi 3 lui servant de cerveau (Alimenté par une batterie de recharge pour portable).
1 caméra pour Raspberry montée sur une articulation "pan-tilt et 2 servos"
1 microphone usb.
1 haut parleur branché sur Jacques.
2 capteurs d'ultra-sons.
3 leds.
1 buzzer.
Des breadboards, des résistances et autres machins/bidules électroniques, des jumpers.
Un bout de planche de récupération recoupée et percée par moi même avec mes mimines.
De la quincaillerie, des scratchs auto-collants, un peu de fil de nylon, une paille.
De la ficelle et du papier... Ah non, ça c'est pour des marionnettes.
Ses caractéristiques intellectuelles :
KRT1 fontionne sur un Raspberry Pi 3 avec un Linux Rasbian Pixel.
Le programme principal de KRT1 est écrit en Python.
Les installations complémentaires nécéssaires et suffisantes sont :
WEB.PY pour la communication.
VLC pour la diffusion du flux vidéo.
OpenCV pour la reconnaissance visuelle.
PyAudio pour la gestion du son.
Pico TTS pour parler.
Et SpeechRecognition STT pour la reconnaissance vocale (BING).
Fichiers créés par moi tout seul avec l'aide de multiples sites Internet.
'THE' fichier Python ( Environ 1200 lignes ).
Un fichier HTML comprenant un soupçon de JavaScript.
Un fichier CSS.
Et enfin, quelques fichiers musicaux pour le fun.
Pour finir voici quelques photos de KRT1 et de son interface de communication :


Voili-Voilà... C'est tout pour le moment.
(Je vais tenter de me lancer dans d'autres réalisations).
Didier.
(A bientôt, peut-être)


 et qui a elle seule mériterait
et qui a elle seule mériterait 


















