

Bonjour !
Je lance un nouveau test, cette fois-ci il s'agit du MPU-6050.
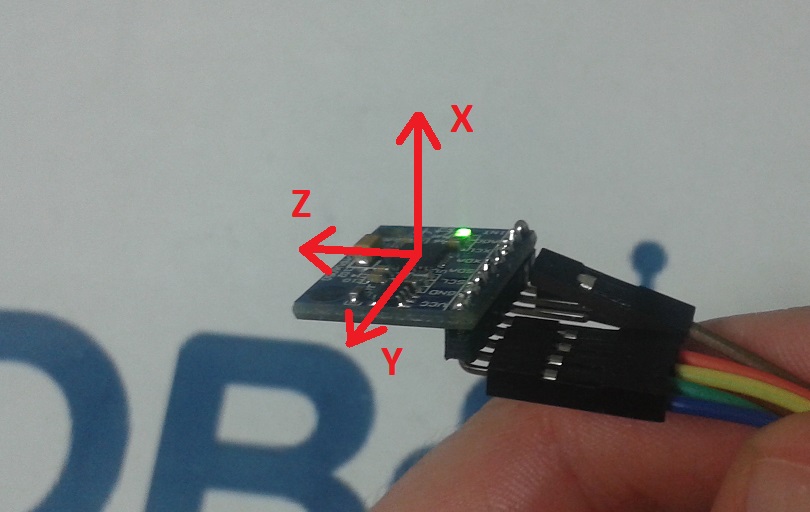
C'est une centrale inertielle à 6 degrés de liberté. Ce capteur comporte à la fois un gyromètre 3 axes et un accéléromètre 3 axes.
Le MPU-6050 est un petit circuit imprimé avec 8 broches de connexions.

Il est fournit avec des connecteurs séparés, il y en a deux sortes. Comme ça on peut souder ceux qu'on veut  .
.
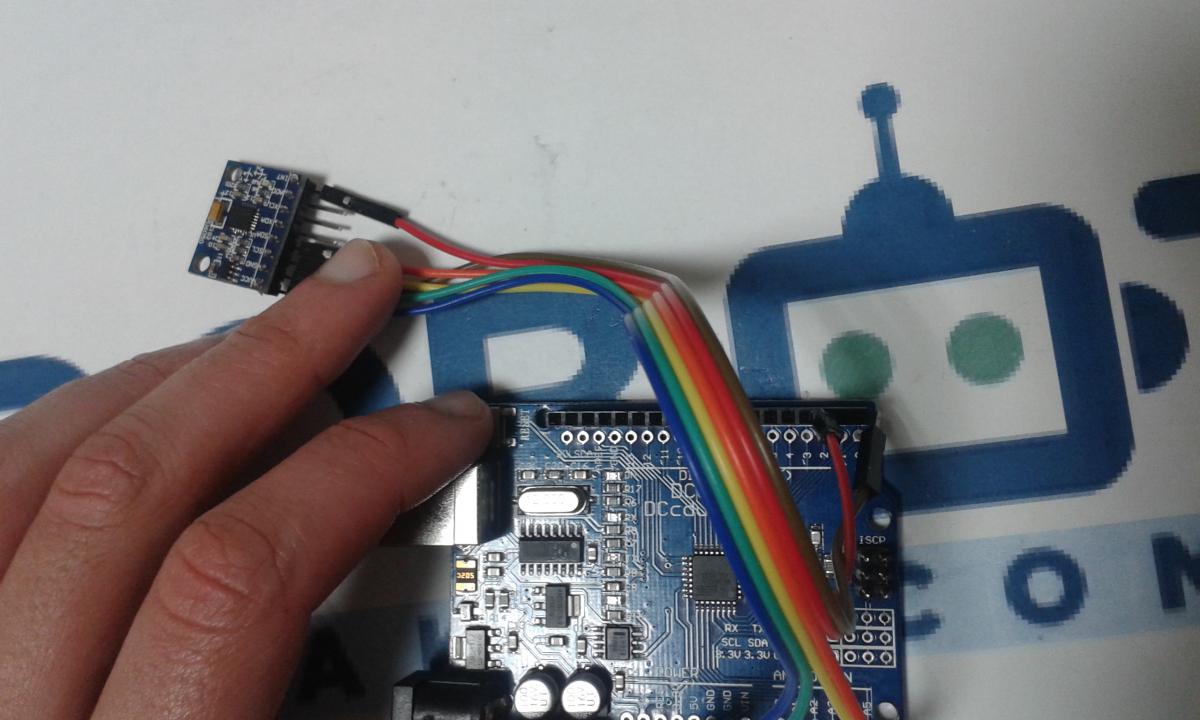
Donc une petite étape de soudure plus tard... le montage.
J'ai utilisé une carte arduino uno pour communiquer avec la centrale inertielle. Le capteur communique avec le protocole I2C, c'est pratique.
Les connexions :
- la broche VCC du capteur avec celle de la carte
- le GND du capteur avec celle de la carte
- la broche SCL du capteur est connectée à la broche A5 de la arduino
- la broche SDA à la broche A4 de la carte
- la broche INT du capteur est connectée à la broche numérique 2 de la carte.
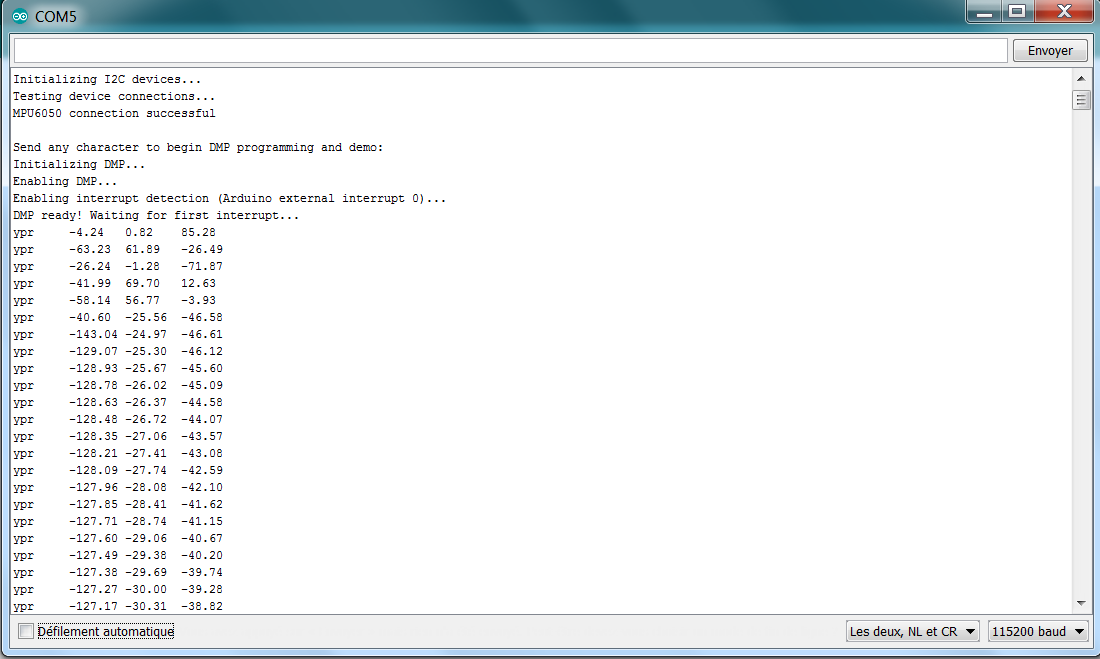
Pour la programmation, je me suis contenté d'utiliser le code d'exemple du MPU-6050 que voici
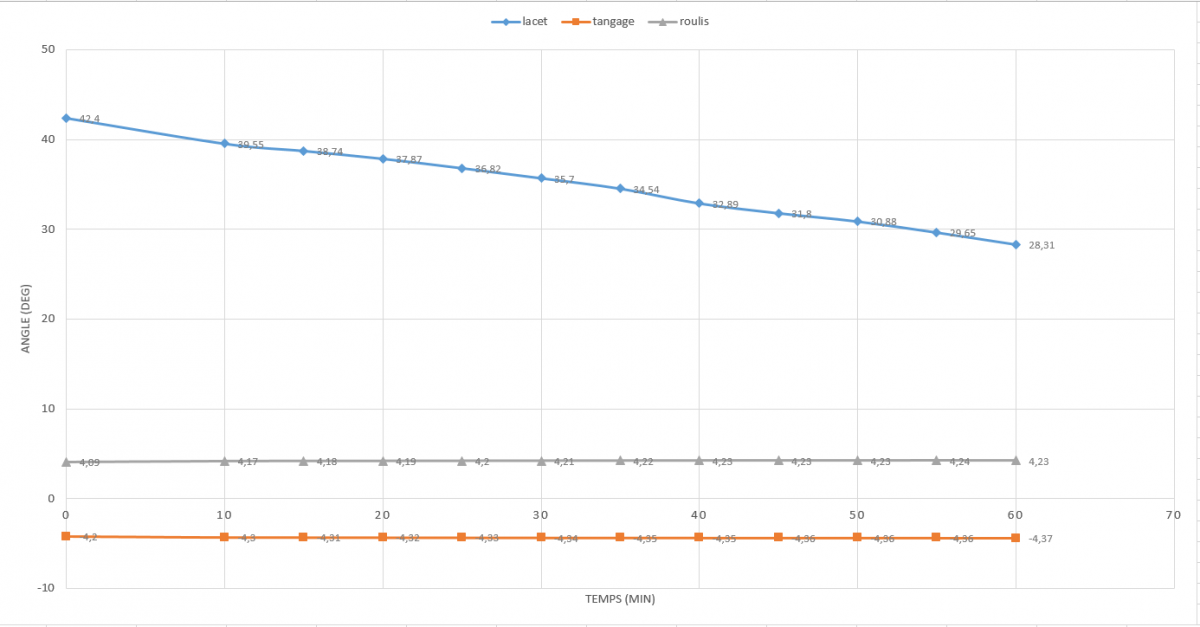
Après un court temps d'initialisation, le capteur affiche des valeurs dans le moniteur série.
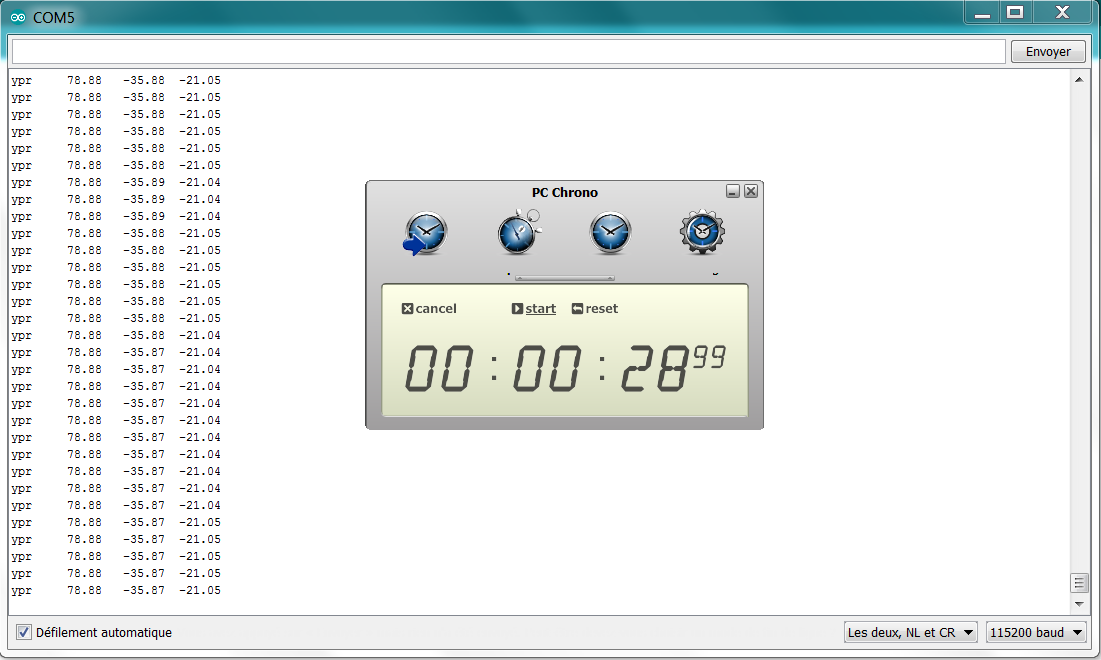
Il faut attendre quelques instants pour que les valeurs se stabilisent.
Ensuite on peut jouer avec la centrale en la bougeant dans tous les sens !
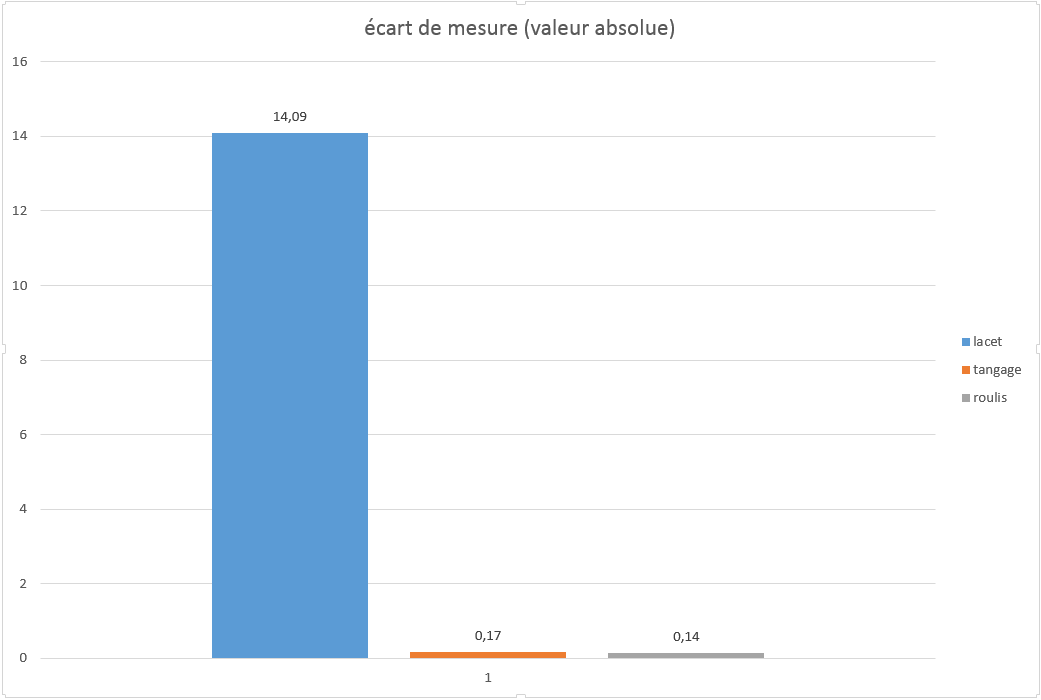
Le capteur à l'air assez précis, ce qui est une très bonne chose !
Pour la suite je vais essayer d'avoir une interface graphique qui analyse les données de la centrale inertielle.



 .
. 





















{kind=link}