 Franchement, qualifier ce chapitre d’indispensable est un peu une escroquerie. Si vous n’Êtes pas adepte de ÂŦ je veux tout savoir Âŧ, passez votre chemin, ignorer ces bavardages et oubliez ces histoires de dÃĐrive gyroscopique. La Terre tourne … point final !
Franchement, qualifier ce chapitre d’indispensable est un peu une escroquerie. Si vous n’Êtes pas adepte de ÂŦ je veux tout savoir Âŧ, passez votre chemin, ignorer ces bavardages et oubliez ces histoires de dÃĐrive gyroscopique. La Terre tourne … point final !
NÃĐanmoins, quand on aborde le chapitre des rotations, entre l’ÃĐvidence et le ÂŦ ça se voit Âŧ, on risque fort de passer à cotÃĐ d’une rÃĐalitÃĐ qui n’a rien de naturel, surtout si le mouvement est abordÃĐ ÂŦ vectoriellement Âŧ. Quand l’affichage des donnÃĐes de navigation a ÃĐtÃĐ introduit dans le programme, en rÃĐfÃĐrence gyroscopique je m’attendais non pas à une rotation de 360° par jour, soit 15° par heure, mais une variation angulaire de 15° / (â2) soit environ 10,6°/H.
Explications relatives à cette hypothÃĻse :
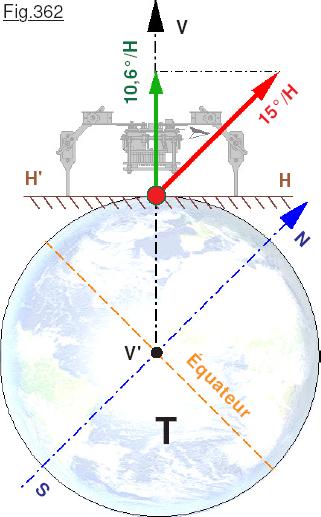
ConsidÃĐrons la Fig.362 sur laquelle est symbolisÃĐe la Terre T avec son axe de rotation Sud/Nord repÃĐrÃĐ par le vecteur SN. Par rapport à l’univers elle tourne à la vitesse de 15°/H, mouvement reprÃĐsentÃĐ par le vecteur rouge. Pour simplifier, sur ce dessin la sonde est supposÃĐe posÃĐe sur le sol au 45° de parallÃĻle Nord. Le sol est donc pour l’observateur perpendiculaire à la verticale locale V’V soit de direction H’H. Hors le LACET pour JEKERT est orientÃĐ dans la direction V’V. On devait donc s’attendre à ce que seule la composante verticale de la rotation terrestre soit enregistrÃĐe par le MPU-6050. Cette projection vectorielle de 15°/H sur V’V donne le 10,6°/H reprÃĐsentÃĐs par le vecteur vert.
x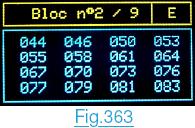 Pour mettre en ÃĐvidence ce phÃĐnomÃĻne, le dÃĐmonstrateur P70_Derive_Gyroscopique.ino a ÃĐtÃĐ rÃĐdigÃĐ et tÃĐlÃĐversÃĐ sur l’ATmega328 du pupitre, pour enregistrer sur une pÃĐriode de 24 heures cette rotation. La mise en Åuvre de ce dÃĐmonstrateur de derniÃĻre minute est dÃĐcrite en dÃĐtail dans le chapitre Enregistrer la dÃĐrive gyroscopique du livret DOSSIER TECHNIQUE. La Fig.363 donne l’une des pages de donnÃĐes enregistrÃĐes. Entre chaque valeur il s’est ÃĐcoulÃĐ une pÃĐriode de dix minutes. En thÃĐorie on devrait avoir entre chaque ÃĐchantillon un ÃĐcart de 0.166° correspondant aux 10,6°/H. Comme les dÃĐcimales ne sont pas affichÃĐes, on s’attendrait à une alternance de 1°, 2°, 1° etc. Hors l’ÃĐcart fait 2°, 4°, 3°, 2°, 3° etc. Voir fluctuer Ã Âą 2° est normal puisque tout affichage numÃĐrique est donnÃĐ Ã Âą une unitÃĐ. Pour ÃĐliminer ce problÃĻme d’affichage, on utilise le bloc de donnÃĐes n°5 montrÃĐ sur la Fig.364 dont les valeurs nÃĐgatives sont barrÃĐes en rouge. Avant
Pour mettre en ÃĐvidence ce phÃĐnomÃĻne, le dÃĐmonstrateur P70_Derive_Gyroscopique.ino a ÃĐtÃĐ rÃĐdigÃĐ et tÃĐlÃĐversÃĐ sur l’ATmega328 du pupitre, pour enregistrer sur une pÃĐriode de 24 heures cette rotation. La mise en Åuvre de ce dÃĐmonstrateur de derniÃĻre minute est dÃĐcrite en dÃĐtail dans le chapitre Enregistrer la dÃĐrive gyroscopique du livret DOSSIER TECHNIQUE. La Fig.363 donne l’une des pages de donnÃĐes enregistrÃĐes. Entre chaque valeur il s’est ÃĐcoulÃĐ une pÃĐriode de dix minutes. En thÃĐorie on devrait avoir entre chaque ÃĐchantillon un ÃĐcart de 0.166° correspondant aux 10,6°/H. Comme les dÃĐcimales ne sont pas affichÃĐes, on s’attendrait à une alternance de 1°, 2°, 1° etc. Hors l’ÃĐcart fait 2°, 4°, 3°, 2°, 3° etc. Voir fluctuer Ã Âą 2° est normal puisque tout affichage numÃĐrique est donnÃĐ Ã Âą une unitÃĐ. Pour ÃĐliminer ce problÃĻme d’affichage, on utilise le bloc de donnÃĐes n°5 montrÃĐ sur la Fig.364 dont les valeurs nÃĐgatives sont barrÃĐes en rouge. Avant  ce bloc il y a 4 x 16 = 64 ÃĐchantillons. L’ÃĐchantillon encadrÃĐ en rose est donc le n°68. Il s’est ÃĐcoulÃĐ 68 fois dix minutes. Donc pour 170° de rotation enregistrÃĐs, une pÃĐriode de 680 minutes s’est ÃĐcoulÃĐe. La vitesse de rotation enregistrÃĐe est donc de 170° / 680 = 0,25°/min soit exactement 15°/H.
ce bloc il y a 4 x 16 = 64 ÃĐchantillons. L’ÃĐchantillon encadrÃĐ en rose est donc le n°68. Il s’est ÃĐcoulÃĐ 68 fois dix minutes. Donc pour 170° de rotation enregistrÃĐs, une pÃĐriode de 680 minutes s’est ÃĐcoulÃĐe. La vitesse de rotation enregistrÃĐe est donc de 170° / 680 = 0,25°/min soit exactement 15°/H.
CONCLUSION : Le fonctionnement interne du PMU-6050 est bien plus subtil qu’il n’y paraÃŪt au premier abord. Pour calculer la valeur de la variation angulaire, nous n’utilisons pas les projections sur les angles d’Euler, mais la projection sur le plan perpendiculaire au LACET du vecteur pesanteur. C’est le changement d’orientation de cette projection qui semble prise en compte et non une intÃĐgration temps rÃĐel du gradian de rotation du gyroscope. Peu importe, retenons que l’indication d’orientation en rÃĐfÃĐrence Gyroscopique correspond à la rotation en LACET, affectÃĐe de la rotation terrestre de 15°/H. Comme la dÃĐrive est constante, il est donc possible de compenser par logiciel …
La suite est ici.