Incident mineur sur JEKERT, hier les ingénieurs ont fait sortir de son hibernation le petit insecte mécanique. Quand les échanges de données ont été établis, les techniciens chargés de l’exploitation du vaisseau ont programmé une légère correction de trajectoire. Cette dernière implique forcément l’usage de la centrale gyroscopique pour orienter correctement la sonde avant l’allumage du moteur orbital. Ce dernier a fonctionné exactement durant les 2,35S prévues. Les radars de poursuite sont unanimes : La trajectoire ne correspond pas à ce qui était prévu. Rien de dramatique une autre correction inférieure à une seconde d’allumage sera suffisante pour corriger le tir. Toutefois, avant d’engager cette manœuvre il est capital de trouver l’origine de l’erreur de trajectoire.
 – Jour Tassin, jour Ferrando. Zavez amené votre coffre fort en S4 ce matin ?
– Jour Tassin, jour Ferrando. Zavez amené votre coffre fort en S4 ce matin ?
– Non grand chef, c’est une réplique du coffret dans lequel est enfermé l’IMU-6050 sur JEKERT.
– Ha bon, ya un prob avec la centrale ?
– Pas bien grave, mais on doit revoir son programme d’initialisation.
– Que se passe t’il ?
– Ben une correction de route a montré qu’elle a un petit PB thermique lors de l’initialisation.
 Une procédure d’initialisation digne de ce nom.
Une procédure d’initialisation digne de ce nom.
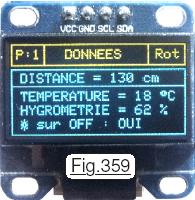
Avec l’ancienne version du programme, quand on passait rapidement de Calage GYRO. à l’affichage en continu des données de navigation en mode G, on constatait souvent que l’écart de route était notable ce qui ne peut s’expliquer par la rotation terrestre. C’était en réalité une dérive des références internes qui se produit quand on teste le bon fonctionnement de la centrale gyroscopique. En consultant les notices d’application du circuit intégré, on arrive à la conclusion que le MPU-6050 ne se stabilise pas vraiment avant que le circuit électronique n’atteigne les 22 degrés Celsius. La bibliothèque nous fournit un moyen de lire la valeur de la température mesurée directement « dans la puce de silicium ». Aussi, la  fonction d’initialisation de la centrale gyroscopique par l’item Test Gyroscope du menu EXPLOITER est maintenant plus élaborée. Preuve en est dans la Fig.358 qui en A précise la température du circuit électronique interne au MPU-6050. On peut remarquer la précision avec laquelle la sonde retourne cette information. On constate sur la Fig.359 que la température extérieure mesurée par le petit capteur météorologique est nettement inférieure. Pour s’assurer de l’initialisation correcte de la centrale gyroscopique, la procédure consiste à déclencher un compteur B. Toutes les secondes on interroge la sonde sur la valeur de sa référence gyroscopique par la commande C. Quand le compteur B est initialisé à 20, on mémorise la valeur retournée par B. Chaque fois que la valeur retournée toutes les secondes est identiques à celle mémorisée, on décrémente le compteur B. Si la valeur change, on la mémorise à nouveau et l’on recommence le décomptage à 20. Quand la centrale gyroscopique est en régime
fonction d’initialisation de la centrale gyroscopique par l’item Test Gyroscope du menu EXPLOITER est maintenant plus élaborée. Preuve en est dans la Fig.358 qui en A précise la température du circuit électronique interne au MPU-6050. On peut remarquer la précision avec laquelle la sonde retourne cette information. On constate sur la Fig.359 que la température extérieure mesurée par le petit capteur météorologique est nettement inférieure. Pour s’assurer de l’initialisation correcte de la centrale gyroscopique, la procédure consiste à déclencher un compteur B. Toutes les secondes on interroge la sonde sur la valeur de sa référence gyroscopique par la commande C. Quand le compteur B est initialisé à 20, on mémorise la valeur retournée par B. Chaque fois que la valeur retournée toutes les secondes est identiques à celle mémorisée, on décrémente le compteur B. Si la valeur change, on la mémorise à nouveau et l’on recommence le décomptage à 20. Quand la centrale gyroscopique est en régime  stabilisé, le compteur va diminuer lentement sans être recyclé à son maximum. Si vingt mesures prouvent la stabilité, la procédure s’achève et rend la main au pupitre en retournant l’accusé de réception attendu OK. Sur la Fig.360 si la valeur de l’ACR ne change pas, dans quatre secondes la centrale gyroscopique sera initialisée. C’est ce que montre la Fig.361 la température est effacée ainsi que le chronomètre de décomptage. Pour ceux qui vont se poser la question, c’est l’instruction de code 90 qui permet de générer une temporisation d’une seconde qui a été modifiée pour pouvoir interroger la sonde, car il n’y a plus de codes disponibles. Quand un programme enregistré en EEPROM est en cours d’exécution, l’instruction 90 ne retourne pas la valeur de la température ce qui bloquerait irrémédiablement le processus, l’ACR étant dans ce mode limité à ‘*‘.
stabilisé, le compteur va diminuer lentement sans être recyclé à son maximum. Si vingt mesures prouvent la stabilité, la procédure s’achève et rend la main au pupitre en retournant l’accusé de réception attendu OK. Sur la Fig.360 si la valeur de l’ACR ne change pas, dans quatre secondes la centrale gyroscopique sera initialisée. C’est ce que montre la Fig.361 la température est effacée ainsi que le chronomètre de décomptage. Pour ceux qui vont se poser la question, c’est l’instruction de code 90 qui permet de générer une temporisation d’une seconde qui a été modifiée pour pouvoir interroger la sonde, car il n’y a plus de codes disponibles. Quand un programme enregistré en EEPROM est en cours d’exécution, l’instruction 90 ne retourne pas la valeur de la température ce qui bloquerait irrémédiablement le processus, l’ACR étant dans ce mode limité à ‘*‘.
La suite est ici.


