Scandale ! Toutes les fonctionnalitĂ©s souhaitĂ©es sont en place, les Ă©crans bavards Ă convenance. Ă€ force d’optimiser, de coller tous les textes en EEPROM, on compacte, on tasse, on optimalise pour finalement aboutir Ă un programme qui ne consomme que 66% de la place disponible dans les neurones de l’ATmega328. RentabilitĂ© minable, c’est inacceptable ! Il faut absolument trouver un moyen d’augmenter la taille du logiciel de la Raquette. Comme tout produit de luxe, c’est l’emballage qui compte, peu importe le contenu. Pour nous, le flacon c’est l’affichage, aussi on va s’en donner Ă cĹ“ur joie avec les possibilitĂ©s graphiques. Le pupitre va se voir dĂ©placĂ© dans les Ă©tagères des produits de luxe … non mais alors ! (Disposer d’une marge considĂ©rable de place pour se faire plaisir avec du graphisme est la cerise sur le gâteau. C’est en fait la rĂ©compense Ă tous nos efforts permanents consentis pour optimiser octet par octet l’occupation de la zone mĂ©moire. Ă€ la base c’Ă©tait dans le but prioritaire d’avoir la possibilitĂ© d’Ă©muler toutes les fonctions dĂ©sirĂ©es. BĂ©nĂ©fice collatĂ©ral, en fin de course on constate que nous avons la possibilitĂ© de « gaspiller » et on ne va pas s’en priver …)

Les modifications de détails.
Commençons par les broutilles, c’est Ă dire quelques amĂ©nagements pour rendre plus agrĂ©able l’utilisation du pupitre, ou des dĂ©tails imposĂ©s par l’avènement du mode graphique sur certaines fonctions. Commençons par tĂ©lĂ©verser P21M_DĂ©monstrateur_Raquette.ino dans NANO Arduino de la raquette. Pour cette version du dĂ©monstrateur on en reste Ă P22L_DĂ©monstrateur_Sonde.ino pour le programme Esclave. Certains textes sont toujours « srabouillĂ©s », tout particulièrement ceux de l’affichage d’un spectre couleur en mode numĂ©rique. Peu importe, ce n’est pas le sujet dans ce chapitre. Dans cette version en mode OPTIONS le BP central du codeur rotatif active ou dĂ©sactive la SÉCURITÉ. Pour activer la stabilisation gyroscopique il faut maintenant armer la sĂ©curitĂ©. Pour activer l’affichage gyroscopique permanent il faut Ă©galement armer la SÉCURITÉ. Cette mesure de prĂ©vention se gĂ©nĂ©ralise en fait Ă toutes les fonctionnalitĂ©s potentiellement risquĂ©es. Pour finir la liste des petits dĂ©tails propres Ă cette version, PHARE et LASER sont forcĂ©s Ă 128 au lieu de 127 pour anticiper l’affichage des graduations en mode ajustement lumineux. (Voir Fig.307) Feuilletons maintenant le catalogue en papier glacĂ© de la version de luxe du programme de la raquette pour nous mettre l’eau Ă la bouche :
Graduations de distance sur un spectre de balayage ultrasons. (Inconditionnel)
Inconditionnel car ce complĂ©ment graphique est permanent et n’impose aucune initialisation d’une option prĂ©alable. DorĂ©navant, le dessin graphique d’un balayage tĂ©lĂ©mĂ©trique sera complĂ©tĂ© comme montrĂ© sur la Fig.308 par des graduations prĂ©cisant la distance des mesures visualisĂ©es. Le tracĂ© graphique peut « écraser » l’affichage de 1m ou de 2m. Il est peu probable que cette superposition se fasse Ă la fois en haut et en bas. Aussi, pour ne pas exagĂ©rer le coĂ»t en octet de ce petit perfectionnement, les Ă©crasements ne sont pas traitĂ©s. Ce serait possible, par exemple en inversant la luminositĂ© des « Pixels Ă©crasĂ©s ». Ceci dit, l’augmentation de programme qui en rĂ©sulterait n’en vaut pas la chandelle, nous aurons bien mieux Ă proposer plus avant dans le didacticiel.

Gradateurs avec ruban analogique. (Inconditionnel)
Commun au gradateur des phares et Ă celui du LASER, ce type de reprĂ©sentation est Ă©galement inconditionnel. La Fig.309 est relative au dosage de l’Ă©nergie dans les phares. On vient d’ouvrir la page Ă©cran sans avoir encore tournĂ© le BPccr, la valeur Ă©nergĂ©tique est donc Ă©gale au 128 initialisĂ© avec l’item appropriĂ©. (Commande de la Fig.307) Pour ne pas que le dosage lumineux soit trop laborieux, la totalitĂ© de la plage est couverte en quatorze pas sur le codeur rotatif. Comme on couvre une plage maximale de 255 unitĂ©, chaque pas va varier de 255 / 14 » 18,2 unitĂ©s.
 Sachant que le processeur binaire ne peut manipuler que des entiers, le pas de variation d’Ă©nergie sera arrondi Ă 18. Un rapide calcul tel que 255 / 18 » 14,17 permettra 14 marches possibles. (Normal vu que l’on est parti de ce postulat !) L’Ă©chelle lumineuse comporte donc des graduations pour 14 intervalles. Par exemple, sur la Fig.310 le BPccr a effectuĂ© 4 pas dans le sens antihoraire. La valeur initiale Ă©tait de 128, le petit trait surchargĂ© en rouge situe ce point de dĂ©part. On vĂ©rifie que 128 – (4 x 18) donne bien comme rĂ©sultat 56, valeur affichĂ©e Ă l’Ă©cran. Si l’on fait encore trois indexations, toujours dans le mĂŞme sens, 56 – (3 x 18) = 2. C’est exactement le cas de la photographie sur la Fig.311 sur laquelle on peut observer un petit dĂ©tail curieux agrandi dans l’encadrĂ© rose. Le ruban lumineux pour la valeur 2 est parfaitement alignĂ© avec la graduation, la verticale Ă©tant pointĂ©e pas la flèche jaune. Assez Ă©trange, le rectangle qui dĂ©limite la largeur du ruban linĂ©aire dĂ©passe, ce que met en Ă©vidence la flèche rouge. Erreur de programmation ou petit dĂ©tail subtil ? Pour lever le doute, faites un pas de plus dans le sens antihoraire. Pafff, on se coltine un BIP d’alerte avec pour explication E2. Faisons un rapide calcul : 2 – 18 = -16 ce qui n’est pas possible puisque la donnĂ©e est un byte dont la valeur est toujours positive. Donc le logiciel signale le
Sachant que le processeur binaire ne peut manipuler que des entiers, le pas de variation d’Ă©nergie sera arrondi Ă 18. Un rapide calcul tel que 255 / 18 » 14,17 permettra 14 marches possibles. (Normal vu que l’on est parti de ce postulat !) L’Ă©chelle lumineuse comporte donc des graduations pour 14 intervalles. Par exemple, sur la Fig.310 le BPccr a effectuĂ© 4 pas dans le sens antihoraire. La valeur initiale Ă©tait de 128, le petit trait surchargĂ© en rouge situe ce point de dĂ©part. On vĂ©rifie que 128 – (4 x 18) donne bien comme rĂ©sultat 56, valeur affichĂ©e Ă l’Ă©cran. Si l’on fait encore trois indexations, toujours dans le mĂŞme sens, 56 – (3 x 18) = 2. C’est exactement le cas de la photographie sur la Fig.311 sur laquelle on peut observer un petit dĂ©tail curieux agrandi dans l’encadrĂ© rose. Le ruban lumineux pour la valeur 2 est parfaitement alignĂ© avec la graduation, la verticale Ă©tant pointĂ©e pas la flèche jaune. Assez Ă©trange, le rectangle qui dĂ©limite la largeur du ruban linĂ©aire dĂ©passe, ce que met en Ă©vidence la flèche rouge. Erreur de programmation ou petit dĂ©tail subtil ? Pour lever le doute, faites un pas de plus dans le sens antihoraire. Pafff, on se coltine un BIP d’alerte avec pour explication E2. Faisons un rapide calcul : 2 – 18 = -16 ce qui n’est pas possible puisque la donnĂ©e est un byte dont la valeur est toujours positive. Donc le logiciel signale le 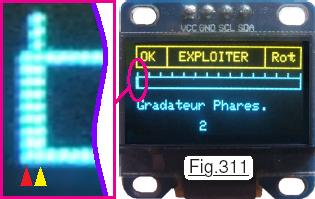 dĂ©bordement « par le bas » et bloque la variable Ă la valeur 1. Si dans cette situation on tourne le « robinet Ă©lectrique » dans le sens horaire, chaque pas va ajouter 18 Ă cette valeur initiale de 1. En zone centrale on franchira avec 127 pour aboutir au maximum valide de 253. Allez, au point oĂą nous en sommes, poussons encore d’un cran. Cette fois le BIP est associĂ© Ă E1 et la valeur talonne Ă 254. On a retrouvĂ© les conditions pour lesquelles le franchissement de la zone centrale se fait avec la valeur 128. Dans l’Ă©tat actuel de dĂ©veloppement du programme, quand on quitte la fonction gradateur lumineux, le ruban graphique n’est pas effacĂ© de l’Ă©cran laissant un rĂ©sidu très beaucoup laid vraiment pas beau. Ce n’est pas fondamental, car Ă ce stade il importe de bien dĂ©finir les effets visuels. Les petits bugs tel que celui-ci seront facilement filtrĂ©s et Ă©liminĂ©s par la suite.
dĂ©bordement « par le bas » et bloque la variable Ă la valeur 1. Si dans cette situation on tourne le « robinet Ă©lectrique » dans le sens horaire, chaque pas va ajouter 18 Ă cette valeur initiale de 1. En zone centrale on franchira avec 127 pour aboutir au maximum valide de 253. Allez, au point oĂą nous en sommes, poussons encore d’un cran. Cette fois le BIP est associĂ© Ă E1 et la valeur talonne Ă 254. On a retrouvĂ© les conditions pour lesquelles le franchissement de la zone centrale se fait avec la valeur 128. Dans l’Ă©tat actuel de dĂ©veloppement du programme, quand on quitte la fonction gradateur lumineux, le ruban graphique n’est pas effacĂ© de l’Ă©cran laissant un rĂ©sidu très beaucoup laid vraiment pas beau. Ce n’est pas fondamental, car Ă ce stade il importe de bien dĂ©finir les effets visuels. Les petits bugs tel que celui-ci seront facilement filtrĂ©s et Ă©liminĂ©s par la suite.
Une LED bleue de plus sur le pupitre.
Bien que mentionnĂ©e tardivement dans ce tutoriel, il y a longtemps que ce tĂ©moin lumineux Ă Ă©tĂ© ajoutĂ© Ă l’arsenal optique, et bien avant d’ajouter la LED rouge sur l’entrĂ©e analogique A0. Les donnĂ©es de navigation sont affichĂ©es en valeurs numĂ©riques. Dès cette version on va aussi bĂ©nĂ©ficier d’une option graphique qui transformera l’Ă©cran OLED en un minuscule tableau de bord symbolisant les paramètres de navigation. C’est le BPccr lors de l’utilisation du menu des DONNEES qui inversera l’Ă©tat du boolĂ©en de l’option graphique. Une LED bleue pilotĂ©e par la sortie binaire D5 reprĂ©sentera visuellement l’Ă©tat actuel du boolĂ©en Mode_Graphique. On pourra librement choisir l’une des deux façons de prĂ©senter les donnĂ©es Ă l’Ă©cran, bien que le mode graphique soit incomparablement plus agrĂ©able. Ceci dit, initialement il Ă©tait vraisemblable d’imaginer que modifier en temps rĂ©el tous ces pixels sur l’Ă©cran prendrait un temps rendant l’application incompatible avec une sensation d’immĂ©diatetĂ©. Le mode textuel aurait alors palliĂ© cette difficultĂ©. Le programme d’affichage graphique a dĂ©montrĂ© que la rapiditĂ© de rafraĂ®chissement serait suffisante. Tant mieux. Inutile toutefois d’Ă©liminer l’affichage textuel, car il fait partie intĂ©grante du menu des DONNEES.
DĂ©finir la prĂ©sentation graphique d’un mini tableau de bord.
PeprĂ©senter un maximum d’informations sous forme symbolique n’est jamais Ă©vident. La surface graphique d’un Ă©cran ouvre un Ă©ventail infini sur la façon dont on reprĂ©sentera les entitĂ©s visualisĂ©es. Rubans linĂ©aires, cercles, portion de disques, tout est possible, globalement limitĂ© par notre imagination. Reste que le dessin informatique est avant tout un brassage intense d’Ă©quations. La trigonomĂ©trie alliĂ©e Ă la gĂ©omĂ©trie seront nos muses les plus prolifiques. Avant de chercher Ă lier le dessin aux rĂ©alitĂ©s de la centrale gyroscopique, une bonne technique consiste Ă oublier les paramètres de navigation rĂ©els et travailler sur une simulation pour Ă©tudier ce qui sera le tableau de bord de JEKERT. Pour aboutir au rĂ©sultat qui sera intĂ©grĂ© dans le logiciel du pupitre, les Ă©tudes prĂ©liminaires sont rĂ©alisĂ©es sur un dĂ©monstrateur indĂ©pendant. L’avantage de mettre Ă contribution un module purement graphique conduit Ă un programme lĂ©ger infiniment plus rapide Ă tĂ©lĂ©verser. Comme les essais de validation des concepts envisagĂ©s sont particulièrement nombreux, avoir Ă tĂ©lĂ©charger un module de taille modeste fait gagner un temps considĂ©rable. Par ailleurs, le listage est très compact, on s’y retrouve plus aisĂ©ment. En conclusion, utiliser des dĂ©monstrateurs de faible taille Ă vocation ciblĂ©e fait partie intĂ©grante des mĂ©thodes efficaces en gĂ©nie logiciel. TĂ©lĂ©versez le petit module Test_mode_graphique.ino qui par son indĂ©pendance fonctionne en autarcie. Il sera donc totalement inutile d’Ă©tablir le dialogue avec le programme esclave.
Pour concevoir un tel écran, on procède en plusieurs étapes :
A) DĂ©terminer avec rigueur l’ensemble des valeurs numĂ©riques Ă indiquer et Ă symboliser,
B) Choisir diverses options graphiques pour symboliser les paramètres importants,
C) RĂ©partir gĂ©ographiquement sur l’Ă©cran toutes ces informations pour en tirer le meilleur parti.
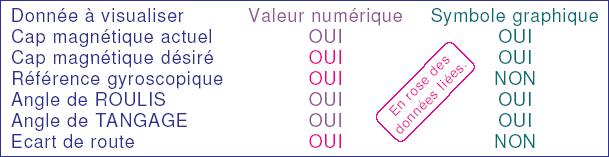
Phase A de l’Ă©tude : Lister les donnĂ©es Ă visualiser.
PrĂ©ambule incontournable Ă la conception d’un tableau de bord, cette phase est primordiale car elle engage fortement toute la suite de l’Ă©tude. Non seulement il faut penser Ă lister l’intĂ©gralitĂ© des informations vitales. Si on en oublie une, et que l’on s’en rend compte quand presque tout est en place, la remise en cause impliquera de nombreuses heures perdues. Par ailleurs, s’il ne faut rien oublier, encombrer l’Ă©cran par des informations peu pertinentes, on perdra considĂ©rablement en qualitĂ© opĂ©rationnelle du « produit fini ». Heureusement pour nous, sur cet aspect du projet notre petite machine est d’une exigence dĂ©risoire. Le tableau donnĂ© ci-dessous rĂ©sume les donnĂ©es :
Phase B de l’Ă©tude : Choisir des options graphiques.
Sachant que cette Ă©tape sera suivie de la rĂ©partition sur l’Ă©cran des divers Ă©lĂ©ments numĂ©riques et symboliques, il faut en partie anticiper, car les phases B et C ne sont pas indĂ©pendantes. Plusieurs pistes ont Ă©tĂ© explorĂ©es. Pour indiquer l’orientation actuelle, il semble que graphiquement la forme la plus adaptĂ©e soit celle d’une « rose des vents ». Sur la Fig.312 sont reprĂ©sentĂ©es les symboles qui ont Ă©tĂ© expĂ©rimentĂ©s, avec en bleu ce qui a Ă©tĂ© retenu, et en rouge les options abandonnĂ©es. Le dessin est trompeur par rapport Ă la rĂ©alitĂ©, car il mesure 392 x 392 pixels alors que sur l’afficheur le plus grand cercle (Sans discontinuitĂ©, donc tracĂ© dans la zone bleue.) ne 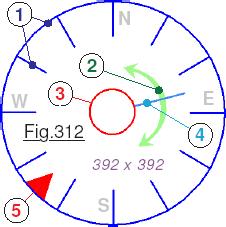 pourra faire que 46 x 46 points au grand maximum. La reprĂ©sentation sur l’Ă©cran OLED sera donc bien plus grossière. Un cercle extĂ©rieur le plus grand possible associĂ© aux douze graduations angulaires reprĂ©sentera la rose des vents repĂ©rĂ©e 1. Les quatre directions cardinales indiquĂ©es en gris clair ne peuvent pas ĂŞtre visualisĂ©es, c’est mentalement que l’on interprĂ©tera le dispositif graphique. Il Ă©tait prĂ©vu un petit cercle central 3 qui esthĂ©tiquement s’avĂ©rait tentant. L’expĂ©rience a montrĂ© que l’aiguille 4 qui tourne comme symbolisĂ© par la flèche courbe 2 Ă©tait trop courte. Pour situer la direction dĂ©sirĂ©e, un index 5 a Ă©tĂ© testĂ©. Pour le reprĂ©senter il faut tracer un triangle dont l’orientation est « radiale ». Rien d’impossible, mais le code Ă©tait gourmant en octets. Le visuel pas idĂ©al car ce triangle pouvait masquer exagĂ©rĂ©ment les graduations angulaires. Il a Ă©tĂ© remplacĂ© par un petit cercle bien plus Ă©conome en taille de programme et qui ne masque jamais de façon gĂŞnante les graduations de 1. Pour le roulis et le tangage, des secteurs circulaires ou en ellipse ont Ă©talement Ă©tĂ© testĂ©s. Infiniment moins « parlants » que de simples rubans linĂ©aires et bien plus pĂ©nalisants en code binaire, ils ont Ă©tĂ© abandonnĂ©s. Par ailleurs la surface qu’ils occupaient individuellement Ă©tait incompatible avec la faible place disponible sur la matrice lumineuse. Il ne restait plus assez de zones pour indiquer les valeurs numĂ©riques. Reste Ă rĂ©partir toutes ces donnĂ©es de façon optimale.
pourra faire que 46 x 46 points au grand maximum. La reprĂ©sentation sur l’Ă©cran OLED sera donc bien plus grossière. Un cercle extĂ©rieur le plus grand possible associĂ© aux douze graduations angulaires reprĂ©sentera la rose des vents repĂ©rĂ©e 1. Les quatre directions cardinales indiquĂ©es en gris clair ne peuvent pas ĂŞtre visualisĂ©es, c’est mentalement que l’on interprĂ©tera le dispositif graphique. Il Ă©tait prĂ©vu un petit cercle central 3 qui esthĂ©tiquement s’avĂ©rait tentant. L’expĂ©rience a montrĂ© que l’aiguille 4 qui tourne comme symbolisĂ© par la flèche courbe 2 Ă©tait trop courte. Pour situer la direction dĂ©sirĂ©e, un index 5 a Ă©tĂ© testĂ©. Pour le reprĂ©senter il faut tracer un triangle dont l’orientation est « radiale ». Rien d’impossible, mais le code Ă©tait gourmant en octets. Le visuel pas idĂ©al car ce triangle pouvait masquer exagĂ©rĂ©ment les graduations angulaires. Il a Ă©tĂ© remplacĂ© par un petit cercle bien plus Ă©conome en taille de programme et qui ne masque jamais de façon gĂŞnante les graduations de 1. Pour le roulis et le tangage, des secteurs circulaires ou en ellipse ont Ă©talement Ă©tĂ© testĂ©s. Infiniment moins « parlants » que de simples rubans linĂ©aires et bien plus pĂ©nalisants en code binaire, ils ont Ă©tĂ© abandonnĂ©s. Par ailleurs la surface qu’ils occupaient individuellement Ă©tait incompatible avec la faible place disponible sur la matrice lumineuse. Il ne restait plus assez de zones pour indiquer les valeurs numĂ©riques. Reste Ă rĂ©partir toutes ces donnĂ©es de façon optimale.
Phase B de l’Ă©tude : Affiner le visuel pour les inclinaisons.
TĂ©lĂ©versez le petit simulateur graphique Test_mode_graphique.ino qui a servi Ă mettre au point les reprĂ©sentations graphiques, Ă dĂ©terminer les formes, Ă effectuer des choix. Plusieurs tailles ont Ă©tĂ© expĂ©rimentĂ©es, ainsi que divers positionnements sur la surface disponible. Il s’agit d’un simulateur en ce sens que le Cap magnĂ©tique, le Roulis, le Tangage sont calculĂ©s dans une boucle d’affichage pour en faire varier en permanence la valeur. Ainsi on peut observer sur l’Ă©cran leurs Ă©volutions et les effets visuels sur l’affichage. Pour optimiser ce minuscule tableau de bord, il a Ă©tĂ© dĂ©cidĂ© de tracer la rose des caps la plus grande possible, et sans discontinuitĂ©. Son plus grand diamètre possible sera donc Ă©gal Ă la hauteur de la zone bleue sur l’afficheur. Pour laisser un maximum de place aux autres informations, le cercle graduĂ© est placĂ© en « butĂ©e » Ă gauche. L’information de navigation la plus importante est le Cap MagnĂ©tique, car c’est lui qui va orienter la trajectoire quand on fait Ă©voluer JEKERT sur Mars. Aussi, pour attirer notre attention sa valeur est situĂ©e dans la zone Jaune et encadrĂ©e. La logique veut que cette information soit situĂ©e au dessus de la rose des caps.
 Choix des symboles pour le ROULIS et le TANGAGE.
Choix des symboles pour le ROULIS et le TANGAGE.
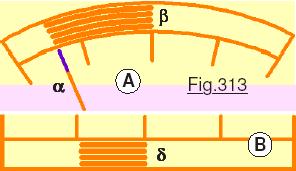
ConsidĂ©rons la Fig.313 sur laquelle en A se trouve montrĂ©e la première reprĂ©sentation envisagĂ©e : Celle d’un secteur circulaire avec une aiguille tournant autour d’un pivot fictif situĂ© bien en dessous des graduations. (En rĂ©alitĂ© ce n’est pas un arc de cercle qui est tracĂ©, mais une portion d’ellipse.) L’expĂ©rience Ă montrĂ© que l’aiguille α longue n’Ă©tait pas idĂ©ale, en particulier quand elle se superposait aux graduations. Elle a donc Ă©tĂ© remplacĂ©e 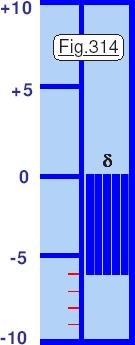 par une plus courte en enlevant l’extrĂ©mitĂ© violette. Comme les manipulations ont montrĂ© que l’effet visuel manquait de lisibilitĂ©, finalement l’aiguille a Ă©tĂ© abandonnĂ©e au profit d’un ruban linĂ©aire courbe reprĂ©sentĂ© en β.
par une plus courte en enlevant l’extrĂ©mitĂ© violette. Comme les manipulations ont montrĂ© que l’effet visuel manquait de lisibilitĂ©, finalement l’aiguille a Ă©tĂ© abandonnĂ©e au profit d’un ruban linĂ©aire courbe reprĂ©sentĂ© en β.
Pour que l’impact visuel soi suffisant, le ruban est composĂ© de quatre lignes. La surface occupĂ©e par ce mode de reprĂ©sentation diminuait de la quantitĂ© reprĂ©sentĂ©e en rose clair.
Visuellement, cette reprĂ©sentation graphique s’avĂ©rait parfaitement utilisable. Elle a Ă©tĂ© abandonnĂ©e au profit de la solution B oĂą l’on procède avec un ruban analogique rectiligne. Manifestement la surface occupĂ©e en hauteur est considĂ©rablement plus faible. Par ailleurs, programmer le cadran de base rectiligne est infiniment moins gourmand en octets que construire les secteurs elliptiques. Enfin, faire afficher les quatre lignes δ prend beaucoup moins de temps que construire les arcs d’ellipse β. Tangage et Roulis serons par consĂ©quences visualisĂ©s par deux rampes analogiques rectilignes.
Choix des Ă©chelles pour le ROULIS et le TANGAGE.
Pour montrer Ă des visiteurs le fonctionnement magique de la centrale gyroscopique, il sera amusant d’incliner la sonde jusqu’Ă des angles de 90° dans un sens oĂą dans l’autre, et ce tant en Roulis qu’en Tangage. Pour ce genre de manipulations elle sera tenue en l’air Ă la main. Puis, lorsque l’on reviendra Ă des simulations de gestion martienne, les plus grandes pentes autorisĂ©e ne dĂ©passeront guère les quinze degrĂ©s. Aussi, pour amplifier l’efficacitĂ© visuelle, on utilise un effet de loupe. Les plages d’inclinaison maximales en Tangage et en Roulis seront comprises entre ±10°. Chaque graduation reprĂ©sente dans ces conditions un intervalle de 5°. Ce choix rend parfaitement repĂ©rable un angle d’inclinaison aussi faible que 1°. Si les 10° sont dĂ©passĂ©s, le ruban analogique « talonnera » sur des butĂ©es logicielles et restera limitĂ© dans le rectangle d’Ă©volution du ruban. La graduation centrale sur l’Ă©chelle des valeurs correspond au neutre, c’est Ă dire Ă une inclinaison nulle. Par exemple sur la Fig.314 le Tangage est reprĂ©sentĂ© verticalement. Les intervalles reprĂ©sentant 5°, les graduations pour 1° telles que celles ajoutĂ©es en rouge ne seront pas visualisĂ©es car la surface disponible n’autorise pas une telle finesse de reprĂ©sentation. C’est mentalement que l’on Ă©valuera la grandeur de l’angle. Sur la Fig.314 le tangage reprĂ©sentĂ© vaut -6 degrĂ©s. Du reste c’est l’impression gĂ©nĂ©rale qui importe, savoir instantanĂ©ment si la sonde cabre ou pique. La valeur prĂ©cise est indiquĂ©e en numĂ©rique. Le symbole d’inclinaison visuel est plus appropriĂ© Ă une prise en compte globale mais rapide.
Phase C de l’Ă©tude : RĂ©partir les valeurs numĂ©riques et les dessins.
Capitale pour aboutir Ă un rĂ©sultat optimal, cette Ă©tape impose forcĂ©ment de nombreuses tentatives pour tirer le meilleur parti d’un si petit afficheur. Au dĂ©part il n’Ă©tait pas du tout Ă©vident qu’avec une dĂ©finition de 128 x 64 pixels on puisse montrer toutes ces donnĂ©es avec un Ă©cran facile Ă interprĂ©ter. Un dĂ©monstrateur spĂ©cifique pour y parvenir s’avĂ©rait donc obligatoire. ConsidĂ©rons la Fig.315 sur laquelle en 1 nous avons la zone des pixels jaunes et en 8 celle des luminophores bleus. Entre ces deux surfaces, se trouve la ligne de sĂ©paration 3 qui engendre une discontinuitĂ© dans les tracĂ©s. C’est la raison pour laquelle le cercle de la rose des vents 4 a vu ses dimensions limitĂ©es par la dĂ©finition en hauteur de la matrice 8. Pour des raisons de lisibilitĂ©, les graduations 5 ont une longueur comprise entre six et sept pixels. La longueur de l’aiguille 6 se voit alors limitĂ©e entre le centre du cercle 4 et la zone interne des graduations car une superposition compliquerait singulièrement la programmation. (Quand l’aiguille « tourne », on efface l’ancien rayon et l’on trace le nouveau. Il faudrait tester si dessous il y avait une graduation pour la reconstituer ce qui augmente le code et ralentit le rafraĂ®chissement que l’on dĂ©sire « en temps rĂ©el ».) En 7 est visualisĂ© le « bug » qui indique la direction dans laquelle on dĂ©sire faire Ă©voluer JEKERT. (Par convention la rose des caps doit ĂŞtre considĂ©rĂ©e comme une carte gĂ©ographique vue de dessus avec le Nord « en haut ».) En 2, bien encadrĂ©e, est prĂ©cisĂ©e la valeur de l’orientation magnĂ©tique actuelle. L’aiguille 6 est tracĂ©e en fonction de cet angle, le Nord correspondant par convention Ă l’origine zĂ©ro. Pour obtenir le plus grand Ă©talement possible du ruban analogique de Roulis, l’Ă©chelle graduĂ©e 9 occupe un maximum de pixels en largeur dans la place disponible Ă droite de 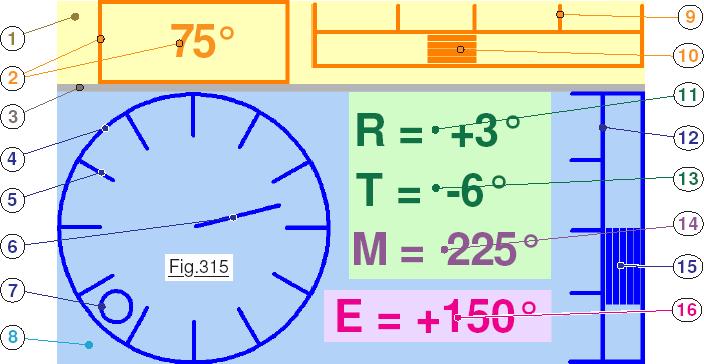 2. Cette largeur est toutefois limitĂ©e par le fait qu’il faut conserver un multiple de vingt pour assurer une proportion linĂ©aire dans le tracĂ© du ruban analogique 10. L’Ă©talement pour les graduations 12 affectĂ©es au Tangage utilise toute la hauteur de la matrice 8. Les luminophores de la matrice graphique sont plus espacĂ©s en hauteur qu’en largeur. Il est assez facile de s’en rendre compte en observant un caractère Ă la loupe. Il en rĂ©sulte que pour obtenir visuellement deux rubans analogiques de largeurs Ă©quivalentes, 10 est tracĂ© avec quatre lignes, alors que verticalement en 15 il en faut cinq. Il restait globalement les zones centrales verte et rose pour afficher les valeurs numĂ©riques des paramètres de navigation. L’entitĂ© qui utilise potentiellement le plus de caractères est l’Ecart de route. Elle est placĂ©e en zone rose 16, car sur la surface encore disponible c’est la partie infĂ©rieure du cercle 4 qui libère latĂ©ralement le plus d’espace. Dans la zone verte, trois lignes d’Ă©criture sont possibles. Le Roulis en 11 est placĂ© en haut, le plus proche possible du ruban analogique associĂ©. En 14 est prĂ©cisĂ©e la valeur de la direction souhaitĂ©e qui dans cet exemple vaut 225°. Elle est situĂ©e assez logiquement juste au dessus de l’Ecart de route. Il restait alors la ligne d’Ă©criture 13 pour prĂ©ciser la valeur du Tangage actuel. La direction de la route souhaitĂ©e est indiquĂ©e en violet, car sur la version ultime du programme, en option il sera possible d’indiquer Ă sa place la valeur de la rĂ©fĂ©rence Gyroscopique interne. Dans ce cas le M sera remplacĂ© par un G. Un chapitre prĂ©cisera ce que reprĂ©sente cette rĂ©fĂ©rence gyroscopique, qui constitue une valeur « interne » au MPU-6050.
2. Cette largeur est toutefois limitĂ©e par le fait qu’il faut conserver un multiple de vingt pour assurer une proportion linĂ©aire dans le tracĂ© du ruban analogique 10. L’Ă©talement pour les graduations 12 affectĂ©es au Tangage utilise toute la hauteur de la matrice 8. Les luminophores de la matrice graphique sont plus espacĂ©s en hauteur qu’en largeur. Il est assez facile de s’en rendre compte en observant un caractère Ă la loupe. Il en rĂ©sulte que pour obtenir visuellement deux rubans analogiques de largeurs Ă©quivalentes, 10 est tracĂ© avec quatre lignes, alors que verticalement en 15 il en faut cinq. Il restait globalement les zones centrales verte et rose pour afficher les valeurs numĂ©riques des paramètres de navigation. L’entitĂ© qui utilise potentiellement le plus de caractères est l’Ecart de route. Elle est placĂ©e en zone rose 16, car sur la surface encore disponible c’est la partie infĂ©rieure du cercle 4 qui libère latĂ©ralement le plus d’espace. Dans la zone verte, trois lignes d’Ă©criture sont possibles. Le Roulis en 11 est placĂ© en haut, le plus proche possible du ruban analogique associĂ©. En 14 est prĂ©cisĂ©e la valeur de la direction souhaitĂ©e qui dans cet exemple vaut 225°. Elle est situĂ©e assez logiquement juste au dessus de l’Ecart de route. Il restait alors la ligne d’Ă©criture 13 pour prĂ©ciser la valeur du Tangage actuel. La direction de la route souhaitĂ©e est indiquĂ©e en violet, car sur la version ultime du programme, en option il sera possible d’indiquer Ă sa place la valeur de la rĂ©fĂ©rence Gyroscopique interne. Dans ce cas le M sera remplacĂ© par un G. Un chapitre prĂ©cisera ce que reprĂ©sente cette rĂ©fĂ©rence gyroscopique, qui constitue une valeur « interne » au MPU-6050.
 Interprétation de la symbolisation graphique.
Interprétation de la symbolisation graphique.
AgencĂ©e dans le but de conduire Ă une interprĂ©tation immĂ©diate et naturelle, c’est forcĂ©ment une Ă©vidence pour le concepteur. C’est du reste l’intĂ©rĂŞt de crĂ©er, on est forcĂ©ment satisfait du rĂ©sultat puisqu’il correspond exactement Ă nos dĂ©sirs. Chacun a sa logique, et souvent notre façon d’apprĂ©hender le monde est fonction de notre vĂ©cu. Est-il plus logique de circuler en automobile Ă droite de la chaussĂ©e ou Ă gauche ? DĂ©montrez votre affirmation …
Aussi, la logique des uns peut se montrer antagoniste avec d’autres. C’est la raison pour laquelle :
• Vous avez avec Test_mode_graphique.ino la possibilitĂ© d’adapter Ă votre mental le visuel actuel,
• Dans ce qui suit sera explicitĂ©e la logique qui s’applique Ă la construction des symbole graphiques.
> Sens positif d’orientation ou de rotation.
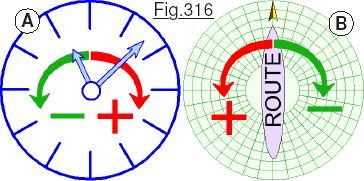
Dans notre vie de tous les jours, la notion de sens horaire ou antihoraire est souvent la plus utilisĂ©e, car les gĂ©nĂ©rations qui nous prĂ©cèdent ont Ă©tĂ© habituĂ©es Ă voir tourner des aiguilles sur des horloges qui font « Tic tac tic tac ». (Avec l’affichage numĂ©rique cette notion est en voie de disparition !) C’est assez naturellement que le sens positif adoptĂ© est celui de la Fig.316 en A. (Pour bien vous montrer 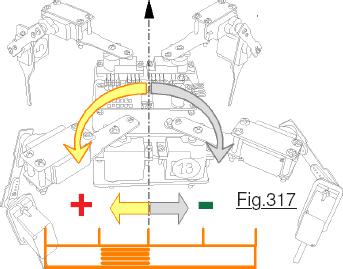 que la logique peut parfois prendre des apparences Ă©tranges : Vous avez remarquĂ© que sur ces pendules d’un autre temps, l’aiguille la plus longue correspond aux intervalles de temps les plus faibles !) En revanche, quand on aborde des notions d’espaces tridimensionnels, les sens d’orientations positifs puisent leur source dans des dĂ©veloppements techniques bien diffĂ©rents. Le sens horaire qui « traditionnellement » est positif devient nĂ©gatif quand on doit raisonner 3D. La Fig.316 en B prĂ©cise les sens qui dans cette Ă©tude seront utilisĂ©s. Positif quand on tourne Ă gauche et nĂ©gatif quand on pivote vers tribord. Ce choix est conditionnĂ© par plusieurs facteurs que je crois pertinents : C’est le sens trigonomĂ©trique positif conventionnel. Hors pour tracer les graphes, la trigonomĂ©trie est fondamentale. Et puis certains d’entre vous, très aventureux, vont aller sur internet pour y puiser des explications sur le circuit MPU-6050. Ils seront confrontĂ©s Ă des entitĂ©s du genre « Angles d’Euler » et des sens de rotation connexes.
que la logique peut parfois prendre des apparences Ă©tranges : Vous avez remarquĂ© que sur ces pendules d’un autre temps, l’aiguille la plus longue correspond aux intervalles de temps les plus faibles !) En revanche, quand on aborde des notions d’espaces tridimensionnels, les sens d’orientations positifs puisent leur source dans des dĂ©veloppements techniques bien diffĂ©rents. Le sens horaire qui « traditionnellement » est positif devient nĂ©gatif quand on doit raisonner 3D. La Fig.316 en B prĂ©cise les sens qui dans cette Ă©tude seront utilisĂ©s. Positif quand on tourne Ă gauche et nĂ©gatif quand on pivote vers tribord. Ce choix est conditionnĂ© par plusieurs facteurs que je crois pertinents : C’est le sens trigonomĂ©trique positif conventionnel. Hors pour tracer les graphes, la trigonomĂ©trie est fondamentale. Et puis certains d’entre vous, très aventureux, vont aller sur internet pour y puiser des explications sur le circuit MPU-6050. Ils seront confrontĂ©s Ă des entitĂ©s du genre « Angles d’Euler » et des sens de rotation connexes.
> InterprĂ©ter l’inclinaison en ROULIS.
Lorsque l’on pilote un mobile, sauf cas très particulier, on regarde de l’arrière vers l’avant. (C’est tout de mĂŞme mieux pour observer la route !) La Fig.317 nous place dans ces conditions. Notre regard va de l’arrière de la sonde vers l’avant. Si elle s’incline Ă gauche, la rotation sera considĂ©rĂ©e comme positive puisqu’elle se fait dans le sens trigonomĂ©trique direct. De l’autre cotĂ©, l’inclinaison sera affectĂ©e du signe moins.
 INTERPRÉTATION IMMÉDIATE : De loin le plus simple consiste Ă ignorer toutes ces thĂ©ories. Il suffit de se dire que le ruban analogique se dĂ©cale vers le cotĂ© oĂą la machine s’incline … et ça c’est au final assez naturel.
INTERPRÉTATION IMMÉDIATE : De loin le plus simple consiste Ă ignorer toutes ces thĂ©ories. Il suffit de se dire que le ruban analogique se dĂ©cale vers le cotĂ© oĂą la machine s’incline … et ça c’est au final assez naturel.
> InterprĂ©ter l’inclinaison en TANGAGE.
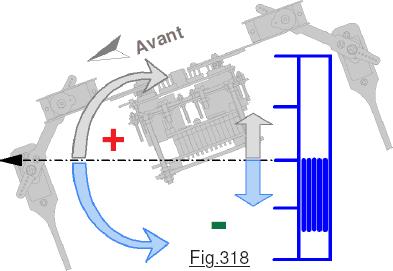
Toujours en regardant de l’arrière vers l’avant, on veut savoir comment se dĂ©place le « nez » de la sonde. De façon simple, le ruban analogique se dĂ©calera soit vers le bas, soit vers le haut. Sur la Fig.318 JEKERT est vu du cotĂ© bâbord et dans cet exemple « pique du nez » d’environ 7°.
INTERPRÉTATION IMMÉDIATE : Si la bande lumineuse est tracĂ©e vers le bas, la sonde est en train de piquer. Si le ruban analogique est tracĂ© du centre vers le haut, c’est que JEKERT est cabrĂ©e.

> InterprĂ©ter l’Ecart de route.
Par dĂ©finition, l’Ă©cart de route est la diffĂ©rence de grandeur angulaire entre la route dĂ©sirĂ©e et celle actuellement suivie par la petite machine. Cette assertion confine Ă une banalitĂ© Ă©vidente. Pourtant, la grandeur numĂ©rique qui sera affichĂ©e pour informer l’opĂ©rateur de la divergence entre le cap actuel de la sonde et celui dans laquelle on dĂ©sire l’orienter n’est pas particulièrement immĂ©diate, surtout lorsque la rose des vents est orientĂ©e en absolu, c’est Ă dire avec le zĂ©ro « vers le haut ». Prenons le cas de la Fig.315 pour lequel on dĂ©sire une route au 225 alors que l’orientation actuelle pointe le 75. Un simple calcul sur la dĂ©finition explicitĂ©e ci-avant donne 225 – 75 = 150. OUF … c’est tout bon !
Supposons que la sonde navigue au 30°. Utilisant la mĂŞme dĂ©finition, l’Ă©cart affichĂ© serait de 225 – 30 = +195.
– Et alors ?
– Plouf spaltchhhh, la valeur indiquĂ©e sera concrètement de -165 !
– Glups, mais pourquoi donc ?
 Faciliter le travail du navigateur consiste Ă raisonner en relatif, c’est Ă dire de placer « en haut » la direction dans laquelle on dĂ©sire naviguer. C’est la direction de la route que l’on observera quand le vaisseau respectera le cap. Et surtout on va diviser l’environnement en deux moitiĂ©s sĂ©parĂ©es par l’axe longitudinal du vaisseau. Peu importe que l’on dise gauche ou bâbord, droite ou tribord. La direction dĂ©sirĂ©e Ă©tant « en haut », soit notre cap actuel est trop Ă gauche, soit trop Ă droite. Au point de vue angulaire on ne dĂ©passera jamais 180°. Cette façon d’indiquer l’Ecart de route est bien plus facile Ă interprĂ©ter : Valeur positive supĂ©rieure Ă zĂ©ro : « Sens trigo » donc trop Ă bâbord il faut gouverner Ă droite. Valeur nĂ©gative : Trop Ă droite il faut corriger vers bâbord. C’est Ă la fois simple et naturel … enfin, quand on a barrĂ© un minimum de temps pour s’y habituer.
Faciliter le travail du navigateur consiste Ă raisonner en relatif, c’est Ă dire de placer « en haut » la direction dans laquelle on dĂ©sire naviguer. C’est la direction de la route que l’on observera quand le vaisseau respectera le cap. Et surtout on va diviser l’environnement en deux moitiĂ©s sĂ©parĂ©es par l’axe longitudinal du vaisseau. Peu importe que l’on dise gauche ou bâbord, droite ou tribord. La direction dĂ©sirĂ©e Ă©tant « en haut », soit notre cap actuel est trop Ă gauche, soit trop Ă droite. Au point de vue angulaire on ne dĂ©passera jamais 180°. Cette façon d’indiquer l’Ecart de route est bien plus facile Ă interprĂ©ter : Valeur positive supĂ©rieure Ă zĂ©ro : « Sens trigo » donc trop Ă bâbord il faut gouverner Ă droite. Valeur nĂ©gative : Trop Ă droite il faut corriger vers bâbord. C’est Ă la fois simple et naturel … enfin, quand on a barrĂ© un minimum de temps pour s’y habituer.
Le minuscule tableau de bord.
Vraiment petit petit, tant par les dimensions que par la dĂ©finition de la matrice de points, il n’en reste pas moins parfaitement exploitable et très agrĂ©able Ă utiliser. Avant de rĂ©installer le dĂ©monstrateur suivant dans la  saga des logiciels de dĂ©veloppement, observez attentivement le simulateur Test_mode_graphique.ino et habituez-vous aux diverses reprĂ©sentations symboliques et numĂ©riques. Sur la Fig.321 obtenue Ă partir du dĂ©monstrateur P21M_DĂ©monstrateur_Raquette.ino est reprĂ©sentĂ©e une copie d’Ă©cran avec des valeurs rĂ©elles issues directement de la sonde. Pour ce cas le cap souhaitĂ© est plein Nord MagnĂ©tique soit la valeur nulle affichĂ©e sous la forme M = 0°. Comme la sonde est tournĂ©e plein Sud, son Cap actuel est au 180°. L’Ă©cart de route est indiquĂ© Ă droite pour 180°, c’est un choix « arbitraire » informatique. Soit on adopte les deux limites [+179° et -180°], soit on privilĂ©gie l’Ă©quivalent [+180° et -179°]. Comme il n’est pas logique d’avoir deux valeurs diffĂ©rentes quand l’orientation actuelle est Ă l’opposĂ©e de celle dĂ©sirĂ©e, on vote arbitrairement -181° ou +180° pour la reprĂ©senter l’autre secteur Ă©tant rĂ©duit d’un degrĂ© par rapport au demi-cercle. Du reste, si pour corriger la route
saga des logiciels de dĂ©veloppement, observez attentivement le simulateur Test_mode_graphique.ino et habituez-vous aux diverses reprĂ©sentations symboliques et numĂ©riques. Sur la Fig.321 obtenue Ă partir du dĂ©monstrateur P21M_DĂ©monstrateur_Raquette.ino est reprĂ©sentĂ©e une copie d’Ă©cran avec des valeurs rĂ©elles issues directement de la sonde. Pour ce cas le cap souhaitĂ© est plein Nord MagnĂ©tique soit la valeur nulle affichĂ©e sous la forme M = 0°. Comme la sonde est tournĂ©e plein Sud, son Cap actuel est au 180°. L’Ă©cart de route est indiquĂ© Ă droite pour 180°, c’est un choix « arbitraire » informatique. Soit on adopte les deux limites [+179° et -180°], soit on privilĂ©gie l’Ă©quivalent [+180° et -179°]. Comme il n’est pas logique d’avoir deux valeurs diffĂ©rentes quand l’orientation actuelle est Ă l’opposĂ©e de celle dĂ©sirĂ©e, on vote arbitrairement -181° ou +180° pour la reprĂ©senter l’autre secteur Ă©tant rĂ©duit d’un degrĂ© par rapport au demi-cercle. Du reste, si pour corriger la route
il faut faire un demi-tour, peu importe que l’on tourne d’un cotĂ© ou de l’autre, la manĹ“uvre Ă©tant strictement Ă©quivalente. (Dans l’hypothèse oĂą il n’y a pas des effets moteurs parasites, un cotĂ© plus favorable en fonction de la direction d’Éole sur un voilier etc.) Sur cet exemple rĂ©el on constate que les deux inclinaisons de seulement 1° d’amplitude sont parfaitement visibles.
La suite est ici.